Общие — Инструкция По Установке И Ремонту Автономки Eberspacher D1Lc На Скании
Инструкция По Установке И Ремонту Автономки Eberspacher D1Lc На СканииИНСТРУКЦИИ ДЛЯ РЕМОНТА И ЭКСПЛУАТАЦИИ ГРУЗОВОЙ, СПЕЦТЕХНИКИ.. EBERSPACHER (Эберспехер) D1L, D1LC,D1LCcompact, D3L,D3LC,D3LC compact и EBERSPACHER старые D5W, D7W, новее D9W и те что продолжают. Руководство по установке топливоподачи подогревателя Webasto.
Автономные отопители автономка Webasto Eberspacher — Устройство и эксплуатация
Правила и нормативы установки топливной магистрали Eberspacher SCANIA Eberspacher AIRTRONIC D2., инструкция по эксплуатации и ремонту эбешпехер D1L RENAULT инструкция по эксплуатации и ремонту Отдельный топливный бак для автономки нюансы если при низких температурах не.
ИНСТРУКЦИИ ДЛЯ РЕМОНТА И ЭКСПЛУАТАЦИИ ГРУЗОВОЙ, СПЕЦТЕХНИКИ.. Из воздушных чаще встречаются: — EBERSPACHER ( Эберспехер) D1L, D1LC. коды неисправностей для автономки Webasto Руководство по установке топливоподачи подогревателя Webasto THERMO 90S THERMO 90ST.
On-line запись на установку, ремонт! Ремонт автономных отопителей Eberspacher Hydronic, Airtronic, Webasto Air Top 2000, 3500, Thermo Top C E, Thermo Top Evo. 25 1384 99 0600 2 Теплообменник воздушного отопителя D1L. 25 1977 51 0030 2 Блок автоматического управления 24В D1LCC SCANIA.
Важная информация 1. Отопители применяются для подогрева двигателя автомобиля (водяные) и обогрева кабины, но не для обогрева грузового отсека автомобиля, предназначенного для перевозки опасных грузов. 2. При эксплуатации отопителя на специальных транспортных средствах (например для перевозки опасных грузов) соблюдать установленные для данной области правила.
Eberspacher это высокотехнологичное и наукоемкое производство, мировой лидер в Наша компания не производит установку и ремонт данных систем. Поэтому могу предложить инструкцию по ремонту если у Вас нет сервисов. Автономка набират обороты только пустит дым и глохнет! ездил на.
Opel,Volkswagen, Scania, Ford, DAF, и другие встраивают в конструкцию Качество изготовления автономки Eberspacher строго соответствует Профессионально выполненные установка и ремонт автономки Eberspacher – гарантия d1lc, покупателю предоставляется компакт-диск с инструкцией на.
По другому не подлючить. 2 разъёма, белый и красный. Может ли из-за регулятора температуры не запускаться ? 24.12.2014 13:23 Автонаходка, Олег Рахманин Здравствуйте, Вы его из сервиса забрали, все что угодно может быть, я ж не знаю что там с ним делали. Поэтому только в сервис, ни кто диагноз отопителю не поставит по Вашему сообщению. 28.09.2014 11:25 Александр Добрый день!
Любая eberspacher установка – высокотехнологичный агрегат, с чьей. Opel,Volkswagen, Scania, Ford, DAF, и другие встраивают в конструкцию Профессионально выполненные установка и ремонт автономки Eberspacher – гарантия d1lc, покупателю предоставляется компакт-диск с инструкцией на.
Avtonomka -bu, Вторник, 12.05.2015, 14:13 Организуют установку Руководство по монтажу, эксплуатации, ремонту D1LC compact MANUAL!
▶▷▶▷ руководство по ремонту и эксплуатации автономный отопитель
▶▷▶▷ руководство по ремонту и эксплуатации автономный отопитель| Интерфейс | Русский/Английский |
| Тип лицензия | Free |
| Кол-во просмотров | 257 |
| Кол-во загрузок | 132 раз |
| Обновление: | 09-08-2019 |
руководство по ремонту и эксплуатации автономный отопитель — Автономный Отопитель Автомобиля Scania Руководство По specificationtheatreweeblycomnewsavtonomnij Cached Руководство по ремонту и техническому обслуживанию автобусов Scania 4-й серии АВТОНОМНЫЙ ОТОПИТЕЛЬ WEBASTO DW 300 THERMO 300 353 Пошаговый ремонт автомобиля, более 3000 цветных фотографий Автономный Отопитель Автомобиля Scania Руководство По volumecreditcardweeblycomblogavtonomnij-otopitelj-av Cached Руководство по ремонту , эксплуатации и техническому обслуживанию грузовых автомобилей Scania 3-й серии, оборудованных двигателями рабочим объемом 9,0 Руководство По Ремонту И Эксплуатации Автономный Отопитель — Image Results More Руководство По Ремонту И Эксплуатации Автономный Отопитель images Автономный Отопитель Автомобиля Scania Руководство По worldwideburdenweeblycomjournalavtonomnij-otopitelj Cached Теплостар, Бинар, Планар, Термикс — автономные отопители и Руководство по ремонту и техническому обслуживанию автобусов Scania 4-й серии АВТОНОМНЫЙ ОТОПИТЕЛЬ WEBASTO DW 300 THERMO 300 353 Eberspacher Руководство По Эксплуатации — softterritory soundproducerweeblycomblogeberspacher-rukovodstvo-po Cached Hidronic 10 в IVECO STRALIS (мокрая печка ), автономный отопитель охлождающей жидкости,ремонт,диагностика,монтаждемонтаж,схемы подключения Airtronic D2 в IVECO STRALIS фен ,инструкция по эксплуатации и ремонту Инструкция По Ремонту Вебасто — mistertopiki mistertopikiweeblycombloginstrukciya-po Cached Это говорит и инструкция по эксплуатации и ремонту Webasto Спустя 15 минут машина полностью готова к поездке Плюсы Вебасто в машине Что такое зима для автомобилиста? Eberspacher Инструкция По Ремонту — manykopiratka megoforumchikweeblycomblogeberspacher-instrukciya-po Cached Hidronic 10 в IVECO STRALIS (мокрая печка ), автономный отопитель охлождающей жидкости,ремонт,диагностика,монтаждемонтаж,схемы подключения Airtronic D2 в IVECO STRALIS фен ,инструкция по эксплуатации и ремонту Руководство По Ремонту Отопителя D1Lc Compact empiregromweeblycomblogrukovodstvo-po-remontu Cached При эксплуатации отопителя на специальных транспортных средствах Руководства по установке и ремонту Eberspacher и Webasto фен эбер D1L 24 V (ростов на дону) Вопрос по фену D3LC Compact -слабо греет 24v D1LC compact Автономный отопитель ,ремонтируем Инструкции форум-манрфtopic9551- автономный Cached Делаю небольшой обзор Как правило,на заводе на МАН устанавливается автономный отопитель Ebershpaher Ставится 2 типа котолов D2 и D4 ,D4 более менее мощный в -28 в салоне тепло Водяные Отопители Руководство По Ремонту — kvolitymaster lagerekspressweeblycomblogvodyanie-otopiteli Cached Жании руководства по диагностике неисправностей и ремонту Водяной насос питель или комбинированный автономный отопитель и Руководство по монтажу, эксплуатации , ремонту Scania Автономный Обогреватель Руководство — footballnewsru warriorhonorweeblycomblogscania-avtonomnij Cached scania 94, 114, 124, 144 том 1 Руководство по ремонту и эксплуатации АВТОНОМНЫЙ ОТОПИТЕЛЬ WEBASTO DW 300 THERMO 300 353 ОБЩИЕ Promotional Results For You Free Download Mozilla Firefox Web Browser wwwmozillaorg Download Firefox — the faster, smarter, easier way to browse the web and all of 1 2 3 4 5 Next 13,500
- ОТОПИТЕЛЬ АВТОНОМНЫЙ ЭБЕРСПЕХЕР.
 Ремонт автономок планар. Руководство по эксплуатации и ремонту.
Ре
Ремонт автономок планар. Руководство по эксплуатации и ремонту.
Ре - монт подогревателей. Срок службы теплообменника воздушного отопителя составляет 10 лет, по истечении которых на авторизованной сервисной станции quot;Вебастоquot; он должен быть заменён на новый произ
- которых на авторизованной сервисной станции quot;Вебастоquot; он должен быть заменён на новый производства quot;Вебастоquot;. При замене теплообменника обязательно заменять установленный на нём ограничитель температуры. …
Руководство по ремонту, установке, эксплуатации отопителей Webasto. AUTOCD.BY OEM каталоги Webasto. Введите число, которое указано выше.
Пошаговый ремонт автомобиля, более 3000 цветных фотографий. Подробное руководство по ремонту отопителей всех известных марок и моделей, ориентированное на самостоятельный ремонт, не требующий специальных сервисных приборов.
3.1 Монтаж отопителя и его ремонт должен производиться специализированны- ми организациями. Работа отопителя по программе 1 возможна только при подключе- нии выносного датчика температуры окружающего воздуха.
Вопросы по ремонту. Ремонт отопителей планар. Руководство по эксплуатации воздушных отопителей 8дм-12 и 8дм-24.
Ремонт вебасто. Проверить воздуховод на проходимость, остудить автономный отопитель Webasto (Вебасто), выключить его (не менее чем на 2 сек), затем ещё один раз включить.
Если диагностика эбершпехер показывает наличие неисправностей, его немедленно передают на ремонт eberspacher . Ремонт автономных отопителей в Москве,Ремонт предпусковых подогревателей в ЮЗАО, диагностика, Webasto, Eberspacher, Defa, Номакон, Прамотроник, Планар.
Ремонт муфты кондиционера. Проверить на проходимость воздуховод, остудить автономный отопитель Webasto, выключить его (не меньше, чем на 2 секунды), затем ещё раз включить.
 Ремонт автономок планар. Руководство по эксплуатации и ремонту.
Ре
Ремонт автономок планар. Руководство по эксплуатации и ремонту.
Ре Вопросы по ремонту. Ремонт отопителей планар. Руководство по эксплуатации воздушных отопителей 8дм-12 и 8дм-24.
Ремонт вебасто. Проверить воздуховод на проходимость, остудить автономный отопитель Webasto (Вебасто), выключить его (не менее чем на 2 сек), затем ещё один раз включить.
Если диагностика эбершпехер показывает наличие неисправностей, его немедленно передают на ремонт eberspacher . Ремонт автономных отопителей в Москве,Ремонт предпусковых подогревателей в ЮЗАО, диагностика, Webasto, Eberspacher, Defa, Номакон, Прамотроник, Планар.
Ремонт муфты кондиционера. Проверить на проходимость воздуховод, остудить автономный отопитель Webasto, выключить его (не меньше, чем на 2 секунды), затем ещё раз включить.
Вопросы по ремонту. Ремонт отопителей планар. Руководство по эксплуатации воздушных отопителей 8дм-12 и 8дм-24.
Ремонт вебасто. Проверить воздуховод на проходимость, остудить автономный отопитель Webasto (Вебасто), выключить его (не менее чем на 2 сек), затем ещё один раз включить.
Если диагностика эбершпехер показывает наличие неисправностей, его немедленно передают на ремонт eberspacher . Ремонт автономных отопителей в Москве,Ремонт предпусковых подогревателей в ЮЗАО, диагностика, Webasto, Eberspacher, Defa, Номакон, Прамотроник, Планар.
Ремонт муфты кондиционера. Проверить на проходимость воздуховод, остудить автономный отопитель Webasto, выключить его (не меньше, чем на 2 секунды), затем ещё раз включить.Defa
Webasto
- автономный отопитель охлождающей жидкости
- 0 Руководство По Ремонту И Эксплуатации Автономный Отопитель — Image Results More Руководство По Ремонту И Эксплуатации Автономный Отопитель images Автономный Отопитель Автомобиля Scania Руководство По worldwideburdenweeblycomjournalavtonomnij-otopitelj Cached Теплостар
- Планар
Нажмите здесь , если переадресация не будет выполнена в течение нескольких секунд руководство по ремонту и эксплуатации автономный отопитель Поиск в Все Картинки Ещё Видео Новости Покупки Карты Книги Все продукты Руководство по эксплуатации автономных воздушных avtocentrruairtop Руководство по эксплуатации автономных воздушных отопителей Air Top ST То же относится к проведению ремонтных работ, выполненных неспециалистами или с Вебасто инструкция по эксплуатации Webasto webastomoscowru В этом разделе сайта собраны все инструкции пользователя для различных моделей отопителей и органов Eberspächer инструкции по эксплуатации отопителей eberspaecherruotopiteli Инструкции по эксплуатации воздушных отопителей Airtronic и жидкостных отопителей Hydronic от Eberspächer ДОКУМЕНТАЦИЯ К ВОЗДУШНЫМ ОТОПИТЕЛЯМ ПЛАНАР wwwteplavozrupdffileshtml АВТОНОМНЫЙ ОТОПИТЕЛЬ ПЛАНАР Руководства по эксплуатации и ремонту дизельных воздушных руководство по эксплуатации воздушных отопителей планар д, д PDF Отопители воздушные ПЛАНАР ДМ , ПЛАНАР ДМ autotermrufilesdcpd мар Руководство по эксплуатации может не отражать Список предприятий, выполняющих гарантийный ремонт Описание устройства и работы отопителя Отопитель является автономным нагревательным PDF Отопители воздушные ПЛАНАР Д autotermru autotermrufilescbcpd Настоящее Руководство по эксплуатации РЭ предназначено для При проведении электросварочных работ на автомобиле или ремонтных работ Отопитель является автономным hl автономные воздушные отопители руководство по Руководство по эксплуатации Предназначение Автономный воздушный отопитель фирмы Вебасто HL Автономный Отопитель Автомобиля Scania Руководство По дек Scania Электросхемы и руководства по ремонту WebastoRussia интернетмагазин Каталог инструкций по монтажу, эксплуатации и ремонту Webasto Описание ремонта PDF РУКОВОДСТВО ПО ЭКСПЛУАТАЦИИ автономные manual _at_ РУКОВОДСТВО ПО ЭКСПЛУАТАЦИИ автономные Автономный воздушный отопитель далее отопитель Air Непрописанные в данном документе работы по ремонту и обслуживанию Webasto статьи по ремонту автомобилей статьи remontgruzovikrupubl окт WEBASTO Thermo Top Руководство для ремонтных Если автономный отопитель Webasto Вебасто WEBASTO Thermo Top C инструкция по эксплуатации и ремонту Картинки по запросу руководство по ремонту и эксплуатации автономный отопитель Инструкции по установке, эксплуатации и ремонту wwwwebastomskruair_top_evo_ Раздел инструкций для отопителя Air Top Evo графические материалы по установке, эксплуатации и Автономные отопители Спи, не замерзнешь kolesoru kolesoruavtonomnyeotopitelispin дек Автономные отопители Спи, не необходимое требование для его нормальной эксплуатации Техническая документация на иностранные агрегаты, Обслуживание и ремонт отопителей Air Top облегчены Руководство по эксплуатации автономных отопителей Руководство по эксплуатации автономных отопителей завода Адверс Руководство по ремонту ПланарДМ Инструкции Webasto Автонаходка wwwautonahodkaruinstruktsiiwebasto Центр по продаже, установки и ремонту автостёкол Руководство по эксплуатации Thermo S расшифровка ошибок Модуль управления штатным автономным отопителем для ам Инструкции по монтажу и эксплуатации Eberspacher wwweberspacheretacrudirectionphp Эберспехер лучшие автономные отопители из Германии Эберспехер монтаж и эксплуатация автономного Инструкция по эксплуатации Air Top Инструкция по эксплуатации Air Top как и проведение ремонтных работ, которые выполнены неспециалистами Во время установки автономных отопителей на автомашинах, которые PDF Электрическая схема автономного отопителя eberspacher dreamsafwoppuapdf Ссылка на это видео подборка электросхем,чтение кодов ошибок, руководства по ремонту и эксплуатации Автономные отопители Eberspacher Автомобильные Руководства по монтажу, эксплуатации и техобслуживанию жидкостных отопителей Эбершпрехер PDF Руководство по эксплуатации ПРАМОТРОНИК Д wwwdeltasibru Руководство по эксплуатации Монтаж отопителя и его ремонт должен производиться специализированны Отопитель является автономным нагревательным устройством и состоит отопитель Планар ДМ квт планар Воздушный Планар DM руководство по эксплуатации pdf Планар ДМ руководство по ремонту pdf Теплостар Самара это автономный отопитель салона или воздушный отопитель, в народе PDF Руководство по эксплуатации автономного отопителя carnuocpppuapdf Руководство по эксплуатации автономного отопителя эберспехер PDF СКАЧАТЬ Руководство по эксплуатации Руководство по монтажу, эксплуатации , ремонту DLC compact MANUAL ! Руководство Прамотроник wwwpramotronikrurukovodstvo Руководство по эксплуатации воздушного отопителя Прамотроник Д Технические характеристики отопителя Автономный воздушный отопитель кабины Камаза Работы по техническому обслуживанию, ремонту и замене автономного отопителя должны производить Воздушные отопители Устройство, техническое kamaavtodetalruvozdushnyeotopite Воздушные отопители Особенность эксплуатации автомобилей в условиях крайнего севера, низкая температура их продукцию системами автономного воздушного отопления кабины Webasto жидкостные предпусковые подогреватели autozapchastiruwebasto manual s сен Руководство по эксплуатации автономных предпусковых по дооборудованию жидкостного отопителя функцией Руководство по ремонту подогревателей Webasto Thermo Airtronic D V с монтажным комплектом устройство , В наличии Воздушный автономный отопитель Eberspacher Airtronic D Diesel V D D Вы можете скачав Руководство по эксплуатации Мини Регулятор Mini AirtronicAirtronic M Руководство по диагностике и ремонту MB PDF Отопители воздушные Air Heater PLANARD PLANAR ncontruddplanardpdf Введение Настоящее руководство по эксплуатации далее по тексту РЭ предназначено для изучения Руководства по эксплуатации Шадринский автоагрегатный shaazbizcatalog Руководства по эксплуатации На главную Руководства по эксплуатации Отопители воздушные независимые Автономный отопитель Eberspacher видеоинструкция по Отопитель Eberspacher Совет При выборе мастерской или сервисного центра для ремонта эксплуатации Руководство по ремонту отопителей Планар wwwugaragerurukovodstvoporemont Ремонт автономных отопителей Планар это одно из направлений деятельности нашей компании Причиной этому могут быть неисправная проводка или неправильная эксплуатация руководство ремонт eberspacher wwwmuhongcnrukovodstvoremont руководство ремонт eberspacher Eberspacher Инструкция По Ремонту числе и по гарантии Руководство по монтажу, эксплуатации , ремонту Немного истории Ремонт автономных отопителей в Москве,Ремонт предпусковых Жидкостные и воздушные автономные отопители апр Те, кто знают, насколько важен автономный отопитель , готовят свой или ремонта , ведь в этот период выбор отопителей и При эксплуатации грузовика или, например, руководство по ремонту вебасто аир kerouanigaidorg wwwkerouanigaidorgrukovodstvop июл Ремонт вентиляторов воздуха автономных отопителей Вебасто и Eberspacher F PDF Руководство по эксплуатации Air Top ST klimatremontru Руководство по эксплуатации руководство по ремонту dlc sotxjatchourscomrukovodstvopo май руководство по ремонту dlc Скачать руководства по эксплуатации и техническому обслуживанию DLC автономный отопитель Инструкция eberspacher dlc на русском Автономный отопитель и вентилятор Ауди А С, wwwaudi manual ru manual Автономный отопитель и вентилятор из раздела Общая информация Инструкция по эксплуатации Отопитель Eberspacher Airtronic D Видео обзор YouTube фев Отопитель Eberspacher Airtronic Видео Видео обзор диагностика автономного отопителя myoutubecom Отопитель воздушный ПЛАНАРDGPS ЮниТрак utsruotopitelvozdushnyyplanar Отопитель воздушный марки Планар ДGP с монтажным комплектом Документация для отопителя воздушного ПЛАНАРDGPS Отопители Планар с маркировкой S руководство по эксплуатации Отопители Инструкции для Eberspacher Airtronic DD Техническое описание , руководство по монтажу, эксплуатации и техническому обслуживанию AirTronic D D Вебасто DBW Инструкция Lyw net lywnocekapurunet РУКОВОДСТВО по эксплуатации ОТОПИТЕЛЕЙ BBW Бензин Инструкция по установке Webasto Thermo Top Жидкосной автономный догреватель Webasto инструкции для Вебасто, инструкция по Ремонту СФЕРОС Е Audi A S Автономный отопитель и вентилятор pkfnporu pkfnporuavtonomnyjotopitel Audi A S Руководство по ремонту и эксплуатации Эксплуатация и техническое обслуживание автомобиля Автономный отопитель салона кВт dopolnitelnyjavtonomnyjotopitelsalon Описание Автономный отопитель Сухой фен KINGMOON или V кВт, КНР Инструкция по эксплуатации и монтажу Автономного отопитель салона Колпаки Книги по ремонту автомобилей Подогреватели двигателя Отопитель Планар ДМ кВт купить за руб , Везде где нужен автономный источник тепла, автономка Планар ДМ Планар ДМ руководство по ремонту Отопители Планар с маркировкой S руководство по эксплуатации автономный воздушный отопитель салона thermotopru Планар ДМ ДМ автономный воздушный отопитель салона Полный монтажный комплект Инструкция по эксплуатации Air Top Webasto wwwwebastomskruindexhtml Проверить воздуховод на проходимость, остудить автономный отопитель Webasto Вебасто, выключить его не Диагностика и ремонт отопителя своими руками klimatremontrukodyneispravnostejj Руководство по эксплуатации с кодами неисправностей автономных отопителей WEBASTO Air Top S Руководства по ремонту Автономный отопитель melukruavtonomnyjotopitelhtml Автономный отопитель работает независимо от системы отопления и вентиляции автомобиля Отопитель отопители hashtag on Twitter отопители ?s Embed Tweet автономные воздушные отопители ateso инструкция автомобильные отопители салона вебасто инструкция по ремонту отопители breeze руководство по эксплуатации PDF Руководство по монтажу и эксплуатации отопителя autocomfortrurukodstvoeksp эксплуатации , руководство по техническому обслуживанию Автономный воздухонагревательный прибор, работающий на дизельном топливе Ремонт не имеющими авторизации сер Автономный отопитель Планар принцип работы Установка автономного отопителя Планар Баяр предоставляет услуги по монтажу отопителей этой марки, а также осуществляет их ремонт и обслуживание Инструкция по эксплуатации Запросы, похожие на руководство по ремонту и эксплуатации автономный отопитель автономный отопитель eberspacher dlc инструкция webasto инструкция по эксплуатации вебасто инструкция на русском eberspacher dlc инструкция на русском вебасто для дизеля инструкция webasto инструкция по установке автономный отопитель eberspacher инструкция eberspacher пульт управления Авто инструкции по ремонту Автокниги в интернет магазине Реклама wwwautodataru Автолитература по ремонту и эксплуатации автомобилей с доставкой по России Более книг по всем маркам с необходимой Диагностические приборы Способы доставки След Войти Версия Поиска Мобильная Полная Конфиденциальность Условия Настройки Отзыв Справка
ОТОПИТЕЛЬ АВТОНОМНЫЙ ЭБЕРСПЕХЕР. Ремонт автономок планар. Руководство по эксплуатации и ремонту.
Ремонт подогревателей. Срок службы теплообменника воздушного отопителя составляет 10 лет, по истечении которых на авторизованной сервисной станции quot;Вебастоquot; он должен быть заменён на новый производства quot;Вебастоquot;. При замене теплообменника обязательно заменять установленный на нём ограничитель температуры. …
Руководство по ремонту, установке, эксплуатации отопителей Webasto. AUTOCD.BY OEM каталоги Webasto. Введите число, которое указано выше.
Пошаговый ремонт автомобиля, более 3000 цветных фотографий. Подробное руководство по ремонту отопителей всех известных марок и моделей, ориентированное на самостоятельный ремонт, не требующий специальных сервисных приборов.
3.1 Монтаж отопителя и его ремонт должен производиться специализированны- ми организациями. Работа отопителя по программе 1 возможна только при подключе- нии выносного датчика температуры окружающего воздуха.
Вопросы по ремонту.
Ремонт автономок планар. Руководство по эксплуатации и ремонту.
Ремонт подогревателей. Срок службы теплообменника воздушного отопителя составляет 10 лет, по истечении которых на авторизованной сервисной станции quot;Вебастоquot; он должен быть заменён на новый производства quot;Вебастоquot;. При замене теплообменника обязательно заменять установленный на нём ограничитель температуры. …
Руководство по ремонту, установке, эксплуатации отопителей Webasto. AUTOCD.BY OEM каталоги Webasto. Введите число, которое указано выше.
Пошаговый ремонт автомобиля, более 3000 цветных фотографий. Подробное руководство по ремонту отопителей всех известных марок и моделей, ориентированное на самостоятельный ремонт, не требующий специальных сервисных приборов.
3.1 Монтаж отопителя и его ремонт должен производиться специализированны- ми организациями. Работа отопителя по программе 1 возможна только при подключе- нии выносного датчика температуры окружающего воздуха.
Вопросы по ремонту. Ремонт отопителей планар. Руководство по эксплуатации воздушных отопителей 8дм-12 и 8дм-24.
Ремонт вебасто. Проверить воздуховод на проходимость, остудить автономный отопитель Webasto (Вебасто), выключить его (не менее чем на 2 сек), затем ещё один раз включить.
Если диагностика эбершпехер показывает наличие неисправностей, его немедленно передают на ремонт eberspacher . Ремонт автономных отопителей в Москве,Ремонт предпусковых подогревателей в ЮЗАО, диагностика, Webasto, Eberspacher, Defa, Номакон, Прамотроник, Планар.
Ремонт муфты кондиционера. Проверить на проходимость воздуховод, остудить автономный отопитель Webasto, выключить его (не меньше, чем на 2 секунды), затем ещё раз включить.
Ремонт отопителей планар. Руководство по эксплуатации воздушных отопителей 8дм-12 и 8дм-24.
Ремонт вебасто. Проверить воздуховод на проходимость, остудить автономный отопитель Webasto (Вебасто), выключить его (не менее чем на 2 сек), затем ещё один раз включить.
Если диагностика эбершпехер показывает наличие неисправностей, его немедленно передают на ремонт eberspacher . Ремонт автономных отопителей в Москве,Ремонт предпусковых подогревателей в ЮЗАО, диагностика, Webasto, Eberspacher, Defa, Номакон, Прамотроник, Планар.
Ремонт муфты кондиционера. Проверить на проходимость воздуховод, остудить автономный отопитель Webasto, выключить его (не меньше, чем на 2 секунды), затем ещё раз включить.
Новая Scania: больше подробностей — Авторевю
Новая Scania, о которой ходило столько слухов, наконец рассекречена: узнаваемый, но подчеркнуто техногенный облик, непривычные дополнительные фары под лобовым стеклом… И кабина серии S — с полностью ровным полом.
Как пишут в симфонических произведениях — «Апофеозо э грандиозо помпозо»! 1200 гостей со всего мира, собравшихся на презентацию Скании в парижском Гран-Пале. Видеотрансляция церемонии в интернете. Два миллиарда евро, затраченные на разработку (она длилась десять лет), десяток миллионов километров, пройденных во время испытаний…
Знаете, что я скажу? Новая Scania — это типичный Volkswagen. Ведь этому концерну и принадлежит шведская компания, а все новые коммерческие модели VW созданы по принципу «чтобы не испугать постоянного клиента». Так что у новой Cкамейки (так Сканию называют водители) — привычная откидная ступенька в бампере, передняя панель, традиционно охватывающая водителя (но уже не так сильно, как прежде), ручник на том же месте… И нижняя кровать с вырезами в районе сидений — ну зачем их оставили? Ведь это же неудобно, поскольку перед сном приходится отодвигать сиденья вперед и вставлять в эти вырезы подушки! На прежнем месте, внизу баранки, остались и кнопки круиз-контроля — расположение которых я тоже критиковал не раз. Впрочем, все это лирика, а технические подробности таковы.
Впрочем, все это лирика, а технические подробности таковы.
Передняя панель — в стиле прежней, но менее закругленная. Руль приплюснут снизу
Пока новая серия представлена с двумя флагманскими кабинами — S и R. Если концепт кабины-«эрки» с небольшим моторным тоннелем уже знаком транспортникам, то «эска» получила полностью ровный пол, которым среди конкурентов может похвастаться, например, Mercedes Actros GigaSpace. Ширина обеих кроватей «эски» 80 см, нижняя может раздвигаться до 100 (подобное решение применялось и раньше). Наружные вещевые лючки, которые прежде были узкими, стали ощутимо крупнее.
Под кабинами — уже опробованные 13- и 16-литровые двигатели со впрыском common rail (у Скании он называется XPI) мощностью от 370 до 730 л.с. Моторы отвечают нормам Евро-6 при помощи либо рециркуляции EGR и мочевинной нейтрализации SCR, либо (в отдельных исполнениях, включая новое 500-сильное) только SCR.
Кабина в варианте «для одного водителя» с ящиками вместо верхней полки
Заявлено, что моторы стали на 3% экономичнее, нежели прежде, еще 5% топлива позволят сберечь улучшенная аэродинамика и нововведения наподобие главной передачи с передаточным числом 2,35 (прежде — 2,59).
Сканиевский «робот» Oрticruise теперь переключается на 0,4 с быстрее, передние тормозные механизмы сделаны более мощными, усовершенствованный адаптивный круиз-контроль АСС (он поддерживает темп впередиидущего автомобиля) отныне работает и на невысоких скоростях, при необходимости замедляя автопоезд до полной остановки.
Наконец, здесь есть новые «помощники водителя» и системы безопасности — включая боковые надувные занавески, которые впервые в мире применяются на дальнобойных тягачах и срабатывают при опрокидывании.
При перевороте будут автоматически надуваться занавески безопасности
Пожалуй, дискутировать о том, какая модель выиграет конкурс International Truck of the Year 2017, нет смысла: и так ясно. Что же касается внешности — привыкнем, как уже привыкли к «космическому пришельцу» Mercedes Actros MP4 и нынешнему Volvo FH… По неофициальной информации, в Россию новая Scania придет через год — осенью 2017-го.
Представлен концепт автономного бескабинного грузовика Scania AXL
Scania, шведский производитель грузовиков, ранее связанный с Saab, разработал экспериментальную автономную модель под названием AXL. Дизайнерское исследование основано на сочетании старых и новых технологий, которые извиваются на строительных площадках, а автономность дает стилистам свободу рисовать футуристический дизайн без кабины, который выглядит так, как будто он из научно-фантастического фильма.
Дизайнерское исследование основано на сочетании старых и новых технологий, которые извиваются на строительных площадках, а автономность дает стилистам свободу рисовать футуристический дизайн без кабины, который выглядит так, как будто он из научно-фантастического фильма.
Конструкция без кабины делает концепцию намного ниже, чем у стандартного грузовика, но изогнутые светодиоды и каскадная решетка приводят ее в соответствие с языком дизайна, который характеризует машины фирмы, управляемые человеком.Некоторые из камер, радаров и датчиков, на которые опирается AXL, встроены в черную панель, на которой также изображена огромная эмблема Scania. Это решение предполагает, что, как и производители автомобилей, производители грузовиков добавят больше черного цвета в свои передние части, чтобы незаметно интегрировать технологии.
Программное обеспечение важнее, чем аппаратное обеспечение, когда дело доходит до обучения грузовика вождению, по словам Scania, тем не менее, AXL оснащен семью камерами, лазером и радарами. Компьютеры объединяют информацию, генерируемую оборудованием, в карту, которая сообщает грузовику, куда ехать, где есть препятствия и где остановиться. Инженеры запрограммировали в системе высокую степень резервирования, потому что водитель-человек физически не может взять на себя управление, если что-то пойдет не так.
Компьютеры объединяют информацию, генерируемую оборудованием, в карту, которая сообщает грузовику, куда ехать, где есть препятствия и где остановиться. Инженеры запрограммировали в системе высокую степень резервирования, потому что водитель-человек физически не может взять на себя управление, если что-то пойдет не так.
Хотя полные технические характеристики остаются в секрете, мы знаем, что AXL использует двигатель внутреннего сгорания, работающий на возобновляемом биотопливе. Автоблог узнал от представителя Scania, что концепт в настоящее время работает на биодизеле.Двигатель можно легко заменить на другой, работающий на другом виде топлива, например на биогазе, поскольку AXL построен на модульной платформе компании.
Scania подчеркнула, что AXL — это концепт, но он может оставаться таковым не очень долго. В отличие от дорожных самосвалов, грузовики, работающие в шахтах и на строительных площадках, имеют хорошие возможности для использования автономных технологий, поскольку они работают на частной территории, где дороги можно легко модифицировать, и они почти всегда движутся по одному и тому же предсказуемому маршруту. Им не нужно принимать во внимание дорожные знаки, пожарные машины или ребенка, гоняющегося за мячом. Однако необходимо контролировать расходы, прежде чем беспилотные грузовики станут господствовать на строительных площадках мира. Тем временем Scania продолжит разработку технологии, чтобы быть уверенной, что она готова поставлять автономные машины, когда рынок потребует этого.
Им не нужно принимать во внимание дорожные знаки, пожарные машины или ребенка, гоняющегося за мячом. Однако необходимо контролировать расходы, прежде чем беспилотные грузовики станут господствовать на строительных площадках мира. Тем временем Scania продолжит разработку технологии, чтобы быть уверенной, что она готова поставлять автономные машины, когда рынок потребует этого.
«У нас все еще нет ответов на все вопросы, но с помощью концептуальных автомобилей, таких как Scania AXL, мы открываем новые горизонты и продолжаем учиться с большой скоростью», — заключил Клас Эриксон, глава отдела исследований и разработок фирмы.
Scania, принадлежащая Volkswagen, не одинока в своем стремлении украсить кабины своих грузовиков. Главный конкурент Volvo объединился с производителем чипов Nvidia в 2019 году, чтобы разработать автономный грузовик без кабины, который даже ниже, чем у Scania. Обе компании совместно разрабатывают модульную, масштабируемую беспилотную систему, которую они планируют запустить в производство как можно раньше, хотя ни одна из них не сообщила более конкретных сроков.
Текущий отчет 8-K
Приложение 99.1 Письмо акционерам за 1 квартал 2021 г. 10 мая 2021 г. Приложение 99.1 Письмо акционерам за 1 квартал 2021 г. 10 мая 2021 г. Заказы на резервирование поступают от крупных грузоотправителей, перевозчиков и арендодателей грузовых автомобилей, включая Penske, Schneider и U.S. Xpress. В апреле было забронировано еще 1000 грузовых автомобилей, в результате чего текущая книга резервирования достигла 6775 грузовиков. § Увеличено наше лидерство по реальным дорожным милям: Продолжающийся рост реальных дорожных миль на ~3.7 миллионов миль на конец квартала, что примерно в 3 раза больше, чем за последние 12 месяцев связанных патентов AV во всем мире. Мы также увеличили количество наших сотрудников, занимающихся исследованиями и разработками, на 17% по сравнению с предыдущим кварталом, до 821 человека к концу квартала. Кавню, начальник службы безопасности Ричард Дж.Kramer — Goodyear, генеральный директор и президент Персио В. Лисбоа — Navistar, президент и главный исполнительный директор Autonomous Freight Network § Получено ~ 1 млн долларов дохода в первом квартале: ускорение получения доходов от платных грузовых перевозок, что обеспечивает дальнейшее развитие нашей автономной технологии и наших коммерческих отношений с AFN § ~$1 млрд капитала роста от IPO: успешное завершение IPO 15 апреля, приносящее ~$1 млрд чистых поступлений для финансирования будущего роста. Наша денежная позиция ориентировочно после IPO превышает 1 доллар.5B § 183 млн долларов США в виде новых инвестиций от Navistar и TRATON: дальнейшее подтверждение прочности наших партнерских отношений с двумя ведущими в мире OEM-производителями полуприцепов | Основные моменты первого квартала § Увеличение числа бронирований 1 Wave: увеличение количества бронирований на 1200 до 5775 на конец четверти. Заказы на резервирование поступают от крупных грузоотправителей, перевозчиков и арендодателей грузовых автомобилей, включая Penske, Schneider и U.S.
Лисбоа — Navistar, президент и главный исполнительный директор Autonomous Freight Network § Получено ~ 1 млн долларов дохода в первом квартале: ускорение получения доходов от платных грузовых перевозок, что обеспечивает дальнейшее развитие нашей автономной технологии и наших коммерческих отношений с AFN § ~$1 млрд капитала роста от IPO: успешное завершение IPO 15 апреля, приносящее ~$1 млрд чистых поступлений для финансирования будущего роста. Наша денежная позиция ориентировочно после IPO превышает 1 доллар.5B § 183 млн долларов США в виде новых инвестиций от Navistar и TRATON: дальнейшее подтверждение прочности наших партнерских отношений с двумя ведущими в мире OEM-производителями полуприцепов | Основные моменты первого квартала § Увеличение числа бронирований 1 Wave: увеличение количества бронирований на 1200 до 5775 на конец четверти. Заказы на резервирование поступают от крупных грузоотправителей, перевозчиков и арендодателей грузовых автомобилей, включая Penske, Schneider и U.S. Xpress. В апреле было забронировано еще 1000 грузовых автомобилей, в результате чего текущая книга резервирования достигла 6775 грузовиков. § Увеличено наше лидерство по реальным дорожным милям: Продолжающийся рост реальных дорожных миль на ~3.7 миллионов миль на конец квартала, что примерно в 3 раза больше, чем за последние 12 месяцев связанных патентов AV во всем мире. Мы также увеличили количество наших сотрудников, занимающихся исследованиями и разработками, на 17% по сравнению с предыдущим кварталом, до 821 человека к концу квартала. Кавню, начальник службы безопасности Ричард Дж.Kramer — Goodyear, генеральный директор и президент Персио В. Лисбоа — Navistar, президент и главный исполнительный директор Autonomous Freight Network § Получено ~ 1 млн долларов дохода в первом квартале: ускорение получения доходов от платных грузовых перевозок, что обеспечивает дальнейшее развитие нашей автономной технологии и наших коммерческих отношений с AFN § ~$1 млрд капитала роста от IPO: успешное завершение IPO 15 апреля, приносящее ~$1 млрд чистых поступлений для финансирования будущего роста.
Xpress. В апреле было забронировано еще 1000 грузовых автомобилей, в результате чего текущая книга резервирования достигла 6775 грузовиков. § Увеличено наше лидерство по реальным дорожным милям: Продолжающийся рост реальных дорожных миль на ~3.7 миллионов миль на конец квартала, что примерно в 3 раза больше, чем за последние 12 месяцев связанных патентов AV во всем мире. Мы также увеличили количество наших сотрудников, занимающихся исследованиями и разработками, на 17% по сравнению с предыдущим кварталом, до 821 человека к концу квартала. Кавню, начальник службы безопасности Ричард Дж.Kramer — Goodyear, генеральный директор и президент Персио В. Лисбоа — Navistar, президент и главный исполнительный директор Autonomous Freight Network § Получено ~ 1 млн долларов дохода в первом квартале: ускорение получения доходов от платных грузовых перевозок, что обеспечивает дальнейшее развитие нашей автономной технологии и наших коммерческих отношений с AFN § ~$1 млрд капитала роста от IPO: успешное завершение IPO 15 апреля, приносящее ~$1 млрд чистых поступлений для финансирования будущего роста. Наша денежная позиция ориентировочно после IPO превышает 1 доллар.5B § 183 млн долларов США новых инвестиций от Navistar и TRATON: дальнейшее подтверждение прочности наших партнерских отношений с двумя ведущими мировыми производителями полуприцепов |
Наша денежная позиция ориентировочно после IPO превышает 1 доллар.5B § 183 млн долларов США новых инвестиций от Navistar и TRATON: дальнейшее подтверждение прочности наших партнерских отношений с двумя ведущими мировыми производителями полуприцепов |
TuSimple Письмо акционерам Значительный рост в первом квартале Tucson – Operations Center Уважаемые акционеры, Сегодня мы рады поделиться с вами результатами первого квартала в качестве публичной компании. TuSimple превратил год испытаний в год прогресса, благодаря которому мы стали первой компанией, занимающейся беспилотным вождением, котирующейся на фондовой бирже.Около 1 миллиарда долларов капитала для роста, который мы привлекли в ходе IPO, дает нам значительную возможность сосредоточиться на наших технологиях и сохранить наше лидерство в отрасли автономных грузоперевозок. Мы продолжали набирать обороты в течение первого квартала, совершенствуя AV Testing Fleet нашу запатентованную технологию искусственного интеллекта и разрабатывая наш специально созданный грузовик L4 класса 8 с Navistar. Наряду с этими технологическими разработками мы возглавили отрасль в создании партнерских отношений с экосистемой автономных транспортных средств и расширили нашу сеть автономных грузовых перевозок (AFN), никогда не упуская из виду нашу миссию по предоставлению надежных и недорогих грузовых мощностей как услуги, устанавливая при этом новый стандарт безопасности. и эффективность использования топлива.Мы разместили введение в TuSimple для наших новых инвесторов на нашем веб-сайте по связям с инвесторами. Scania Europe тестирует нашу технологию искусственного интеллекта, определяющую отрасль Наша запатентованная технология, основанная на искусственном интеллекте, продолжает устанавливать отраслевые стандарты и позиционирует нас как лидера в области автономных грузоперевозок. Основные технические достижения первого квартала § Пройдены еще одни производственные ворота в нашей программе производства грузовиков L4 с Navistar. Мы рады достигнутому прогрессу и продолжаем двигаться к запланированному запуску производства в 2024 году.
Наряду с этими технологическими разработками мы возглавили отрасль в создании партнерских отношений с экосистемой автономных транспортных средств и расширили нашу сеть автономных грузовых перевозок (AFN), никогда не упуская из виду нашу миссию по предоставлению надежных и недорогих грузовых мощностей как услуги, устанавливая при этом новый стандарт безопасности. и эффективность использования топлива.Мы разместили введение в TuSimple для наших новых инвесторов на нашем веб-сайте по связям с инвесторами. Scania Europe тестирует нашу технологию искусственного интеллекта, определяющую отрасль Наша запатентованная технология, основанная на искусственном интеллекте, продолжает устанавливать отраслевые стандарты и позиционирует нас как лидера в области автономных грузоперевозок. Основные технические достижения первого квартала § Пройдены еще одни производственные ворота в нашей программе производства грузовиков L4 с Navistar. Мы рады достигнутому прогрессу и продолжаем двигаться к запланированному запуску производства в 2024 году. § Начаты автономные испытания грузовиков Scania на дорогах общего пользования в Швеции.Это первая программа тестирования такого рода в Европе. § Дальнейшее проектирование и разработка трех ключевых функций, обеспечивающих масштабное развертывание L4: система наблюдения TuSimple Connect (1), состояния минимального риска (MRC) и полное резервирование системы. 3 (1) Состояние, при котором автономное транспортное средство, столкнувшееся с неразрешенным крайним случаем, должно съехать на обочину, чтобы обеспечить безопасное решение. Письмо TuSimple акционерам. рады поделиться с вами нашими результатами за первый квартал впервые в качестве публичной компании.TuSimple превратил год испытаний в год прогресса, благодаря которому мы стали первой компанией, занимающейся беспилотным вождением, котирующейся на фондовой бирже. Около 1 миллиарда долларов капитала для роста, который мы привлекли в ходе IPO, дает нам значительную возможность сосредоточиться на наших технологиях и сохранить наше лидерство в отрасли автономных грузоперевозок.
§ Начаты автономные испытания грузовиков Scania на дорогах общего пользования в Швеции.Это первая программа тестирования такого рода в Европе. § Дальнейшее проектирование и разработка трех ключевых функций, обеспечивающих масштабное развертывание L4: система наблюдения TuSimple Connect (1), состояния минимального риска (MRC) и полное резервирование системы. 3 (1) Состояние, при котором автономное транспортное средство, столкнувшееся с неразрешенным крайним случаем, должно съехать на обочину, чтобы обеспечить безопасное решение. Письмо TuSimple акционерам. рады поделиться с вами нашими результатами за первый квартал впервые в качестве публичной компании.TuSimple превратил год испытаний в год прогресса, благодаря которому мы стали первой компанией, занимающейся беспилотным вождением, котирующейся на фондовой бирже. Около 1 миллиарда долларов капитала для роста, который мы привлекли в ходе IPO, дает нам значительную возможность сосредоточиться на наших технологиях и сохранить наше лидерство в отрасли автономных грузоперевозок. Мы продолжали набирать обороты в течение первого квартала, совершенствуя AV Testing Fleet нашу запатентованную технологию искусственного интеллекта и разрабатывая наш специально созданный грузовик L4 класса 8 с Navistar.Наряду с этими технологическими разработками мы возглавили отрасль в создании партнерских отношений с экосистемой автономных транспортных средств и расширили нашу сеть автономных грузовых перевозок (AFN), никогда не упуская из виду нашу миссию по предоставлению надежных и недорогих грузовых мощностей как услуги, устанавливая при этом новый стандарт безопасности. и эффективность использования топлива. Мы разместили введение в TuSimple для наших новых инвесторов на нашем веб-сайте по связям с инвесторами. Scania Europe тестирует нашу технологию искусственного интеллекта, определяющую отрасль Наша запатентованная технология, основанная на искусственном интеллекте, продолжает устанавливать отраслевые стандарты и позиционирует нас как лидера в области автономных грузоперевозок.
Мы продолжали набирать обороты в течение первого квартала, совершенствуя AV Testing Fleet нашу запатентованную технологию искусственного интеллекта и разрабатывая наш специально созданный грузовик L4 класса 8 с Navistar.Наряду с этими технологическими разработками мы возглавили отрасль в создании партнерских отношений с экосистемой автономных транспортных средств и расширили нашу сеть автономных грузовых перевозок (AFN), никогда не упуская из виду нашу миссию по предоставлению надежных и недорогих грузовых мощностей как услуги, устанавливая при этом новый стандарт безопасности. и эффективность использования топлива. Мы разместили введение в TuSimple для наших новых инвесторов на нашем веб-сайте по связям с инвесторами. Scania Europe тестирует нашу технологию искусственного интеллекта, определяющую отрасль Наша запатентованная технология, основанная на искусственном интеллекте, продолжает устанавливать отраслевые стандарты и позиционирует нас как лидера в области автономных грузоперевозок. Основные технические достижения первого квартала § Пройдены еще одни производственные ворота в нашей программе производства грузовиков L4 с Navistar. Мы рады достигнутому прогрессу и продолжаем двигаться к запланированному запуску производства в 2024 году. § Начаты автономные испытания грузовиков Scania на дорогах общего пользования в Швеции. Это первая в своем роде программа тестирования в Европе. § Дальнейшее проектирование и разработка трех ключевых функций, обеспечивающих развертывание L4 в масштабе: система наблюдения TuSimple Connect (1), состояния минимального риска (MRC) и полное резервирование системы. 3 (1) Состояние, при котором автономное транспортное средство, столкнувшееся с неразрешенным краевым случаем, должно остановиться на обочине, чтобы обеспечить безопасное разрешение
Основные технические достижения первого квартала § Пройдены еще одни производственные ворота в нашей программе производства грузовиков L4 с Navistar. Мы рады достигнутому прогрессу и продолжаем двигаться к запланированному запуску производства в 2024 году. § Начаты автономные испытания грузовиков Scania на дорогах общего пользования в Швеции. Это первая в своем роде программа тестирования в Европе. § Дальнейшее проектирование и разработка трех ключевых функций, обеспечивающих развертывание L4 в масштабе: система наблюдения TuSimple Connect (1), состояния минимального риска (MRC) и полное резервирование системы. 3 (1) Состояние, при котором автономное транспортное средство, столкнувшееся с неразрешенным краевым случаем, должно остановиться на обочине, чтобы обеспечить безопасное разрешение
Наша технология искусственного интеллекта определяет отрасль (продолжение) Вице-президент по картам, Роберт Росси Ключевые операционные показатели 31 декабря 2020 г. 31 марта 2021 г. Рост в квартальном исчислении % Численность сотрудников НИОКР 701 821 17 % Общая численность персонала 839 978 17 % Выданных патентов 247 280 13 % (1) Пройдено дорожных миль ~2.9M ~3,7M 25% AV-таланты мирового класса выбирают TuSimple Наша команда по исследованиям и разработкам составляет примерно 84% от общей численности персонала и увеличилась на 120 человек в течение первого квартала до 821 человека. Карты § Обширный опыт руководства в области искусственного интеллекта и продолжающееся увеличение численности сотрудников отдела исследований и разработок по мере ускорения разработки автономных систем в Microsoft и разработки нашей технологии. В апреле мы приветствовали TomTom Роберта Росси, вице-президента по картам, который возглавил нашу программу HD-картографии. Роберт обладает обширным опытом в разработке искусственного интеллекта и автономных систем, используя свои значительные 280 выданных патентов, которые обеспечивают развитие наших полуприцепов L4 и опыт руководства бизнесом на предыдущих должностях в Microsoft и TomTom.
31 марта 2021 г. Рост в квартальном исчислении % Численность сотрудников НИОКР 701 821 17 % Общая численность персонала 839 978 17 % Выданных патентов 247 280 13 % (1) Пройдено дорожных миль ~2.9M ~3,7M 25% AV-таланты мирового класса выбирают TuSimple Наша команда по исследованиям и разработкам составляет примерно 84% от общей численности персонала и увеличилась на 120 человек в течение первого квартала до 821 человека. Карты § Обширный опыт руководства в области искусственного интеллекта и продолжающееся увеличение численности сотрудников отдела исследований и разработок по мере ускорения разработки автономных систем в Microsoft и разработки нашей технологии. В апреле мы приветствовали TomTom Роберта Росси, вице-президента по картам, который возглавил нашу программу HD-картографии. Роберт обладает обширным опытом в разработке искусственного интеллекта и автономных систем, используя свои значительные 280 выданных патентов, которые обеспечивают развитие наших полуприцепов L4 и опыт руководства бизнесом на предыдущих должностях в Microsoft и TomTom. (2) Самые коммерческие патенты на грузовики AV в мире В первом квартале TuSimple выдал 31 новый патент, расширив наш глобальный портфель до 280 выданных патентов, которые защищают достижения в области управления транспортными средствами, аппаратного обеспечения, эксплуатации транспортных средств и многого другого. Кроме того, мы внедрили значительные технические инновации в менее заметные технологии автономных грузоперевозок, такие как машинное обучение, восприятие, сбор реальных данных и обработка для обучения ИИ, которые мы охраняем как коммерческую тайну. Нет замены миллионам дорожных миль полуприцепов Наш парк из 70 модернизированных автономных грузовиков проехал около 700 тысяч дорожных миль в первом квартале, в результате чего совокупный дорожный пробег (миллионов) составил ~3.Пройдено 7 миллионов миль к концу четверти ~ в 3 раза по сравнению с прошлым годом. Во время дорожных миссий датчики наших грузовиков собирают 3,7 реальных данных со скоростью сотни гигабайт за 2,9 часа. Затем данные передаются в нашу разработку технологии искусственного интеллекта.
(2) Самые коммерческие патенты на грузовики AV в мире В первом квартале TuSimple выдал 31 новый патент, расширив наш глобальный портфель до 280 выданных патентов, которые защищают достижения в области управления транспортными средствами, аппаратного обеспечения, эксплуатации транспортных средств и многого другого. Кроме того, мы внедрили значительные технические инновации в менее заметные технологии автономных грузоперевозок, такие как машинное обучение, восприятие, сбор реальных данных и обработка для обучения ИИ, которые мы охраняем как коммерческую тайну. Нет замены миллионам дорожных миль полуприцепов Наш парк из 70 модернизированных автономных грузовиков проехал около 700 тысяч дорожных миль в первом квартале, в результате чего совокупный дорожный пробег (миллионов) составил ~3.Пройдено 7 миллионов миль к концу четверти ~ в 3 раза по сравнению с прошлым годом. Во время дорожных миссий датчики наших грузовиков собирают 3,7 реальных данных со скоростью сотни гигабайт за 2,9 часа. Затем данные передаются в нашу разработку технологии искусственного интеллекта. Автомобилисты ведут себя по-разному с полуприцепами 2,2, поэтому для совершенствования нашей системы L4 необходимы реальные данные. В некоторых из наших миссий наша автономная система 1.3 32% управляет транспортным средством, тестируя и улучшая нашу систему 30% L4 в реальных сценариях.В других миссиях 37% человек управляет транспортным средством, а наша автономная система работает в «теневом режиме», чтобы сравнить свои решения Q1’20 Q2’20 Q3’20 Q4’20 Q1’21 с решениями наших высококвалифицированных водителей-испытателей. 42% 37% 30% 32% 25% (1) Дорожные мили состоят из всех миль, пройденных автономными транспортными средствами TuSimple по всему миру 4 (2) Насколько нам известно, по сравнению со стартапами, ориентированными на грузоперевозки, ни одна другая компания не предоставила больше патентов, связанных с автономными коммерческими грузовиками, чем TuSimple Примечание: число (%) может не соответствовать из-за округления Наша технология искусственного интеллекта определяет отрасль (продолжение) Вице-президент по картам, Роберт Росси Ключевые операционные показатели 31 декабря 2020 г.
Автомобилисты ведут себя по-разному с полуприцепами 2,2, поэтому для совершенствования нашей системы L4 необходимы реальные данные. В некоторых из наших миссий наша автономная система 1.3 32% управляет транспортным средством, тестируя и улучшая нашу систему 30% L4 в реальных сценариях.В других миссиях 37% человек управляет транспортным средством, а наша автономная система работает в «теневом режиме», чтобы сравнить свои решения Q1’20 Q2’20 Q3’20 Q4’20 Q1’21 с решениями наших высококвалифицированных водителей-испытателей. 42% 37% 30% 32% 25% (1) Дорожные мили состоят из всех миль, пройденных автономными транспортными средствами TuSimple по всему миру 4 (2) Насколько нам известно, по сравнению со стартапами, ориентированными на грузоперевозки, ни одна другая компания не предоставила больше патентов, связанных с автономными коммерческими грузовиками, чем TuSimple Примечание: число (%) может не соответствовать из-за округления Наша технология искусственного интеллекта определяет отрасль (продолжение) Вице-президент по картам, Роберт Росси Ключевые операционные показатели 31 декабря 2020 г. 31 марта/ Рост в квартальном исчислении за 2021 г. % Штат НИОКР 701 821 17% Штат сотрудников в мире 839 978 17% Выдано патентов 247 280 13% (1) Пройдено дорожных миль ~2.9M ~3,7M 25% AV-таланты мирового класса выбирают TuSimple Наша команда по исследованиям и разработкам составляет примерно 84% от общей численности персонала и увеличилась на 120 человек в течение первого квартала до 821 человека. Карты § Обширный опыт руководства в области искусственного интеллекта и продолжающееся увеличение численности сотрудников отдела исследований и разработок по мере ускорения разработки автономных систем в Microsoft и разработки нашей технологии. В апреле мы приветствовали TomTom Роберта Росси, вице-президента по картам, который возглавил нашу программу HD-картографии. Роберт обладает обширным опытом в разработке искусственного интеллекта и автономных систем, используя свои значительные 280 выданных патентов, которые обеспечивают развитие наших полуприцепов L4 и опыт руководства бизнесом на предыдущих должностях в Microsoft и TomTom. (2) Самые коммерческие патенты на грузовики AV в мире В первом квартале TuSimple выдал 31 новый патент, расширив наш глобальный портфель до 280 выданных патентов, которые защищают достижения в области управления транспортными средствами, аппаратного обеспечения, эксплуатации транспортных средств и многого другого. Кроме того, мы внедрили значительные технические инновации в менее заметные технологии автономных грузоперевозок, такие как машинное обучение, восприятие, сбор реальных данных и обработка для обучения ИИ, которые мы охраняем как коммерческую тайну. Нет замены миллионам дорожных миль полуприцепов Наш парк из 70 модернизированных автономных грузовиков проехал около 700 тысяч дорожных миль в первом квартале, в результате чего совокупный дорожный пробег (миллионов) составил ~3.Пройдено 7 миллионов миль к концу четверти ~ в 3 раза по сравнению с прошлым годом. Во время дорожных миссий датчики наших грузовиков собирают 3,7 реальных данных со скоростью сотни гигабайт за 2,9 часа. Затем данные передаются в нашу разработку технологии искусственного интеллекта.
31 марта/ Рост в квартальном исчислении за 2021 г. % Штат НИОКР 701 821 17% Штат сотрудников в мире 839 978 17% Выдано патентов 247 280 13% (1) Пройдено дорожных миль ~2.9M ~3,7M 25% AV-таланты мирового класса выбирают TuSimple Наша команда по исследованиям и разработкам составляет примерно 84% от общей численности персонала и увеличилась на 120 человек в течение первого квартала до 821 человека. Карты § Обширный опыт руководства в области искусственного интеллекта и продолжающееся увеличение численности сотрудников отдела исследований и разработок по мере ускорения разработки автономных систем в Microsoft и разработки нашей технологии. В апреле мы приветствовали TomTom Роберта Росси, вице-президента по картам, который возглавил нашу программу HD-картографии. Роберт обладает обширным опытом в разработке искусственного интеллекта и автономных систем, используя свои значительные 280 выданных патентов, которые обеспечивают развитие наших полуприцепов L4 и опыт руководства бизнесом на предыдущих должностях в Microsoft и TomTom. (2) Самые коммерческие патенты на грузовики AV в мире В первом квартале TuSimple выдал 31 новый патент, расширив наш глобальный портфель до 280 выданных патентов, которые защищают достижения в области управления транспортными средствами, аппаратного обеспечения, эксплуатации транспортных средств и многого другого. Кроме того, мы внедрили значительные технические инновации в менее заметные технологии автономных грузоперевозок, такие как машинное обучение, восприятие, сбор реальных данных и обработка для обучения ИИ, которые мы охраняем как коммерческую тайну. Нет замены миллионам дорожных миль полуприцепов Наш парк из 70 модернизированных автономных грузовиков проехал около 700 тысяч дорожных миль в первом квартале, в результате чего совокупный дорожный пробег (миллионов) составил ~3.Пройдено 7 миллионов миль к концу четверти ~ в 3 раза по сравнению с прошлым годом. Во время дорожных миссий датчики наших грузовиков собирают 3,7 реальных данных со скоростью сотни гигабайт за 2,9 часа. Затем данные передаются в нашу разработку технологии искусственного интеллекта. Автомобилисты ведут себя по-разному с полуприцепами 2,2, поэтому для совершенствования нашей системы L4 необходимы реальные данные. В некоторых из наших миссий наша автономная система 1.3 32% управляет транспортным средством, тестируя и улучшая нашу систему 30% L4 в реальных сценариях.В других миссиях 37% человек управляет транспортным средством, а наша автономная система работает в «теневом режиме», чтобы сравнить свои решения Q1’20 Q2’20 Q3’20 Q4’20 Q1’21 с решениями наших высококвалифицированных водителей-испытателей. 42% 37% 30% 32% 25% (1) Дорожные мили состоят из всех миль, пройденных автономными транспортными средствами TuSimple по всему миру 4 (2) Насколько нам известно, по сравнению со стартапами, ориентированными на грузоперевозки, ни одна другая компания не предоставила больше патенты, относящиеся к автономным коммерческим грузовикам, чем TuSimple Примечание: (%) могут не ходить из-за округления Тестирование снаружи (1) Целью разработки технологии автономных полуприцепов Уровня 4 (L4) является устранение требования о контроле водителя.
Автомобилисты ведут себя по-разному с полуприцепами 2,2, поэтому для совершенствования нашей системы L4 необходимы реальные данные. В некоторых из наших миссий наша автономная система 1.3 32% управляет транспортным средством, тестируя и улучшая нашу систему 30% L4 в реальных сценариях.В других миссиях 37% человек управляет транспортным средством, а наша автономная система работает в «теневом режиме», чтобы сравнить свои решения Q1’20 Q2’20 Q3’20 Q4’20 Q1’21 с решениями наших высококвалифицированных водителей-испытателей. 42% 37% 30% 32% 25% (1) Дорожные мили состоят из всех миль, пройденных автономными транспортными средствами TuSimple по всему миру 4 (2) Насколько нам известно, по сравнению со стартапами, ориентированными на грузоперевозки, ни одна другая компания не предоставила больше патенты, относящиеся к автономным коммерческим грузовикам, чем TuSimple Примечание: (%) могут не ходить из-за округления Тестирование снаружи (1) Целью разработки технологии автономных полуприцепов Уровня 4 (L4) является устранение требования о контроле водителя. В феврале 2020 года мы запустили нашу первую пилотную программу Driver-Out (Driver-Out), чтобы публично достичь этой цели. Цель Driver-Out — публично продемонстрировать безопасность, зрелость и функциональность нашей системы виртуального вождения, включая коммерческую эксплуатацию в ночное время, на нашем AFN. Во время Driver-Out наш грузовик будет двигаться автономно от пункта отправления до пункта назначения по коммерческому маршруту между столичными районами Феникса и Тусона с реальным грузом. Выбранный маршрут включает в себя большинство сценариев типичных грузовых перевозок: терминалы, автостоянки, наземные улицы и автомагистрали, проходящие через центры городов и пригородные районы Selected Driver-Out Pilot Route.Мы ожидаем, что Driver-Out будет сложной задачей, но наш опыт за последние шесть лет дает нам уверенность в том, что мы готовы к этой новаторской программе. Driver-Out — новаторская веха в технологии AV Различия между системами входа водителя (L2/L3) и нашей системой выхода драйвера (L4) значительны.
В феврале 2020 года мы запустили нашу первую пилотную программу Driver-Out (Driver-Out), чтобы публично достичь этой цели. Цель Driver-Out — публично продемонстрировать безопасность, зрелость и функциональность нашей системы виртуального вождения, включая коммерческую эксплуатацию в ночное время, на нашем AFN. Во время Driver-Out наш грузовик будет двигаться автономно от пункта отправления до пункта назначения по коммерческому маршруту между столичными районами Феникса и Тусона с реальным грузом. Выбранный маршрут включает в себя большинство сценариев типичных грузовых перевозок: терминалы, автостоянки, наземные улицы и автомагистрали, проходящие через центры городов и пригородные районы Selected Driver-Out Pilot Route.Мы ожидаем, что Driver-Out будет сложной задачей, но наш опыт за последние шесть лет дает нам уверенность в том, что мы готовы к этой новаторской программе. Driver-Out — новаторская веха в технологии AV Различия между системами входа водителя (L2/L3) и нашей системой выхода драйвера (L4) значительны. Ожидается, что все системы L2/L3 будут совершать ошибки, даже критические для безопасности. Водитель-человек по-прежнему несет полную ответственность за транспортное средство. С грузовиком L4 любой внутренний аппаратный или программный сбой, а также все дорожные ситуации должны обнаруживаться и устраняться самим грузовиком.С помощью этой пилотной программы мы стремимся стать первой компанией по автономному вождению, в которой полуприцеп L4 выполняет настоящую доставку грузов On Track для миссии по выезду на дорогу без человека в кабине. Что необходимо для подготовки к Driver-Out Для подготовки к Driver-Out мы разработали нашу автономную систему с нуля, применив строгий инженерный подход к анализу функций и потенциальных отказов для каждого компонента. Цели, которых мы достигли на этапе отказа от драйвера, включают: § Устранение единой точки отказа, а для некоторых критических компонентов мы обеспечили двойное и тройное резервирование § Разработка многих электрических компонентов для поддержки самодиагностики и устойчивости к любому отказу оборудования 5 (1 ) Ожидается, что автономное решение уровня 4 будет способно выполнять операции по выезду водителя на маршрутах, нанесенных на карту AFN.
Ожидается, что все системы L2/L3 будут совершать ошибки, даже критические для безопасности. Водитель-человек по-прежнему несет полную ответственность за транспортное средство. С грузовиком L4 любой внутренний аппаратный или программный сбой, а также все дорожные ситуации должны обнаруживаться и устраняться самим грузовиком.С помощью этой пилотной программы мы стремимся стать первой компанией по автономному вождению, в которой полуприцеп L4 выполняет настоящую доставку грузов On Track для миссии по выезду на дорогу без человека в кабине. Что необходимо для подготовки к Driver-Out Для подготовки к Driver-Out мы разработали нашу автономную систему с нуля, применив строгий инженерный подход к анализу функций и потенциальных отказов для каждого компонента. Цели, которых мы достигли на этапе отказа от драйвера, включают: § Устранение единой точки отказа, а для некоторых критических компонентов мы обеспечили двойное и тройное резервирование § Разработка многих электрических компонентов для поддержки самодиагностики и устойчивости к любому отказу оборудования 5 (1 ) Ожидается, что автономное решение уровня 4 будет способно выполнять операции по выезду водителя на маршрутах, нанесенных на карту AFN. Обновление промежуточного этапа Driver-Out. Разработка специально построенных грузовиков L4 класса 8. Вскоре мы будем готовы принять участие в тестировании с выездом водителя (1) 4 (L4) технология автономных полуприцепов с выездом водителя должна устранить требование о контроле водителя.В феврале 2020 года мы запустили нашу первую пилотную программу Driver-Out (Driver-Out), чтобы публично достичь этой цели. Цель Driver-Out — публично продемонстрировать безопасность, зрелость и функциональность нашей системы виртуального вождения, включая коммерческую эксплуатацию в ночное время, на нашем AFN. Во время Driver-Out наш грузовик будет двигаться автономно от пункта отправления до пункта назначения по коммерческому маршруту между столичными районами Феникса и Тусона с реальным грузом. Выбранный маршрут включает в себя большинство сценариев типичных грузовых перевозок: терминалы, автостоянки, наземные улицы и автомагистрали, проходящие через центры городов и пригородные районы Selected Driver-Out Pilot Route.
Обновление промежуточного этапа Driver-Out. Разработка специально построенных грузовиков L4 класса 8. Вскоре мы будем готовы принять участие в тестировании с выездом водителя (1) 4 (L4) технология автономных полуприцепов с выездом водителя должна устранить требование о контроле водителя.В феврале 2020 года мы запустили нашу первую пилотную программу Driver-Out (Driver-Out), чтобы публично достичь этой цели. Цель Driver-Out — публично продемонстрировать безопасность, зрелость и функциональность нашей системы виртуального вождения, включая коммерческую эксплуатацию в ночное время, на нашем AFN. Во время Driver-Out наш грузовик будет двигаться автономно от пункта отправления до пункта назначения по коммерческому маршруту между столичными районами Феникса и Тусона с реальным грузом. Выбранный маршрут включает в себя большинство сценариев типичных грузовых перевозок: терминалы, автостоянки, наземные улицы и автомагистрали, проходящие через центры городов и пригородные районы Selected Driver-Out Pilot Route. Мы ожидаем, что Driver-Out будет сложной задачей, но наш опыт за последние шесть лет дает нам уверенность в том, что мы готовы к этой новаторской программе. Driver-Out — новаторская веха в технологии AV Различия между системами входа водителя (L2/L3) и нашей системой выхода драйвера (L4) значительны. Ожидается, что все системы L2/L3 будут совершать ошибки, даже критические для безопасности. Водитель-человек по-прежнему несет полную ответственность за транспортное средство. С грузовиком L4 любой внутренний аппаратный или программный сбой, а также все дорожные ситуации должны обнаруживаться и устраняться самим грузовиком.С помощью этой пилотной программы мы стремимся стать первой компанией по автономному вождению, в которой полуприцеп L4 выполняет настоящую доставку грузов On Track для миссии по выезду на дорогу без человека в кабине. Что необходимо для подготовки к Driver-Out Для подготовки к Driver-Out мы разработали нашу автономную систему с нуля, применив строгий инженерный подход к анализу функций и потенциальных отказов для каждого компонента.
Мы ожидаем, что Driver-Out будет сложной задачей, но наш опыт за последние шесть лет дает нам уверенность в том, что мы готовы к этой новаторской программе. Driver-Out — новаторская веха в технологии AV Различия между системами входа водителя (L2/L3) и нашей системой выхода драйвера (L4) значительны. Ожидается, что все системы L2/L3 будут совершать ошибки, даже критические для безопасности. Водитель-человек по-прежнему несет полную ответственность за транспортное средство. С грузовиком L4 любой внутренний аппаратный или программный сбой, а также все дорожные ситуации должны обнаруживаться и устраняться самим грузовиком.С помощью этой пилотной программы мы стремимся стать первой компанией по автономному вождению, в которой полуприцеп L4 выполняет настоящую доставку грузов On Track для миссии по выезду на дорогу без человека в кабине. Что необходимо для подготовки к Driver-Out Для подготовки к Driver-Out мы разработали нашу автономную систему с нуля, применив строгий инженерный подход к анализу функций и потенциальных отказов для каждого компонента. Цели, которых мы достигли на этапе отказа от драйвера, включают: § Устранение единой точки отказа, а для некоторых критических компонентов мы обеспечили двойное и тройное резервирование § Разработка многих электрических компонентов для поддержки самодиагностики и устойчивости к любому отказу оборудования 5 (1 ) Ожидается, что автономное решение уровня 4 будет способно выполнять операции по удалению водителей на сопоставленных маршрутах AFN
Цели, которых мы достигли на этапе отказа от драйвера, включают: § Устранение единой точки отказа, а для некоторых критических компонентов мы обеспечили двойное и тройное резервирование § Разработка многих электрических компонентов для поддержки самодиагностики и устойчивости к любому отказу оборудования 5 (1 ) Ожидается, что автономное решение уровня 4 будет способно выполнять операции по удалению водителей на сопоставленных маршрутах AFN
Обновление этапа завершения работы водителя (продолжение) Устранена единая точка отказа в аппаратном/программном обеспечении § Совместно с нашими партнерами уровня 1 разработать первую и единственную полностью дублированную систему рулевого управления и торможения L4 для тяжелых грузовиков LiDAR, радары и ультразвуковая система дальнего действия. § Разработан автоматический конвейер данных, в котором используются алгоритмы AI Upgrade Sensor Suites для анализа и обнаружения редких событий. использование миллионов миль дорожных данных, которые мы собираем, что дает полное представление о потенциальных дорожных происшествиях обновленный дизайн Этап 3 нашей программы разработки Driver-Out Мы разделили разработку нашей пилотной программы Driver-Out на 4 этапа. Фаза 1 была сосредоточена на разработке архитектуры автономной системы, а фаза 2 — на разработке нашего первого прототипа. В настоящее время мы находимся на этапе 3 прототипа местоположения Sensor Suite, целью которого является доведение нашего испытательного парка с этапом 4 в качестве окончательной проверки, которую мы стремимся завершить в четвертом квартале. Driver-Out (1) Определить ODD | Требование к продукту Разработка аппаратной и программной архитектуры. MRC и надзор. Проверка и валидация Этап разработки автономии 1 – Определение требований Этап 3 – Проверка системы (2) Продукт | Требования FuSa, аппаратное и программное обеспечение | Принятие критериев, выпуск автономии, проверка системной архитектуры и дизайна системы, оптимизация | Завершение проектирования 1 квартал 2020 г. 4 квартал 2021 г. Этап 2 – Готовность платформы Этап 4 – Проверка системы Анализ воздействия | Интеграция аппаратного и программного обеспечения | Компонент проверки выезда водителя | Проверка на испытательном стенде (1) ODD — область эксплуатационного проектирования — описание конкретных областей эксплуатации, в которых автоматизированная функция или система предназначена для надлежащей работы, включая, помимо прочего, типы дорог, скорость, погоду и другие ограничения области.
Фаза 1 была сосредоточена на разработке архитектуры автономной системы, а фаза 2 — на разработке нашего первого прототипа. В настоящее время мы находимся на этапе 3 прототипа местоположения Sensor Suite, целью которого является доведение нашего испытательного парка с этапом 4 в качестве окончательной проверки, которую мы стремимся завершить в четвертом квартале. Driver-Out (1) Определить ODD | Требование к продукту Разработка аппаратной и программной архитектуры. MRC и надзор. Проверка и валидация Этап разработки автономии 1 – Определение требований Этап 3 – Проверка системы (2) Продукт | Требования FuSa, аппаратное и программное обеспечение | Принятие критериев, выпуск автономии, проверка системной архитектуры и дизайна системы, оптимизация | Завершение проектирования 1 квартал 2020 г. 4 квартал 2021 г. Этап 2 – Готовность платформы Этап 4 – Проверка системы Анализ воздействия | Интеграция аппаратного и программного обеспечения | Компонент проверки выезда водителя | Проверка на испытательном стенде (1) ODD — область эксплуатационного проектирования — описание конкретных областей эксплуатации, в которых автоматизированная функция или система предназначена для надлежащей работы, включая, помимо прочего, типы дорог, скорость, погоду и другие ограничения области. (2) FuSa — функциональная безопасность — общая безопасность системы или части оборудования, которая зависит от правильной работы автоматической защиты в ответ на ее ввод или отказ предсказуемым образом. Driver-Out Milestone Progress Update (продолжение) Устранена единая точка отказа в аппаратном/программном обеспечении § Совместная работа с нашими партнерами уровня 1 для разработки первой и единственной полностью дублирующей системы рулевого управления и тормозной системы L4 для тяжелых грузовиков § Модернизация нашего грузовика наборы датчиков с различными датчиками, объединенными вместе, включая систему камер собственной разработки, которая позволяет работать в ночное время, LiDAR дальнего действия, LiDAR среднего действия, радары и ультразвуковую систему. § Разработан автоматический конвейер данных, в котором используются наборы датчиков AI Upgrade алгоритмы для анализа и обнаружения редких происшествий с использованием собранных нами данных о миллионах миль дорог, что дает полное представление о потенциальных дорожных происшествиях.
(2) FuSa — функциональная безопасность — общая безопасность системы или части оборудования, которая зависит от правильной работы автоматической защиты в ответ на ее ввод или отказ предсказуемым образом. Driver-Out Milestone Progress Update (продолжение) Устранена единая точка отказа в аппаратном/программном обеспечении § Совместная работа с нашими партнерами уровня 1 для разработки первой и единственной полностью дублирующей системы рулевого управления и тормозной системы L4 для тяжелых грузовиков § Модернизация нашего грузовика наборы датчиков с различными датчиками, объединенными вместе, включая систему камер собственной разработки, которая позволяет работать в ночное время, LiDAR дальнего действия, LiDAR среднего действия, радары и ультразвуковую систему. § Разработан автоматический конвейер данных, в котором используются наборы датчиков AI Upgrade алгоритмы для анализа и обнаружения редких происшествий с использованием собранных нами данных о миллионах миль дорог, что дает полное представление о потенциальных дорожных происшествиях. внедрение решений и тщательное тестирование обновленного дизайна. На этапе 3 нашей программы разработки Driver-Out Мы разделили разработку нашего Driver-Out пилотную программу на 4 этапа.Фаза 1 была сосредоточена на разработке архитектуры автономной системы, а фаза 2 — на разработке нашего первого прототипа. В настоящее время мы находимся на этапе 3 прототипа местоположения Sensor Suite, целью которого является доведение нашего испытательного парка с этапом 4 в качестве окончательной проверки, которую мы стремимся завершить в четвертом квартале. Driver-Out (1) Определить ODD | Требование к продукту Разработка аппаратной и программной архитектуры. MRC и надзор. Проверка и валидация Этап разработки автономии 1 – Определение требований Этап 3 – Проверка системы (2) Продукт | Требования FuSa, аппаратное и программное обеспечение | Принятие критериев, выпуск автономии, проверка системной архитектуры и дизайна системы, оптимизация | Завершение проектирования 1 квартал 2020 г. 4 квартал 2021 г.
внедрение решений и тщательное тестирование обновленного дизайна. На этапе 3 нашей программы разработки Driver-Out Мы разделили разработку нашего Driver-Out пилотную программу на 4 этапа.Фаза 1 была сосредоточена на разработке архитектуры автономной системы, а фаза 2 — на разработке нашего первого прототипа. В настоящее время мы находимся на этапе 3 прототипа местоположения Sensor Suite, целью которого является доведение нашего испытательного парка с этапом 4 в качестве окончательной проверки, которую мы стремимся завершить в четвертом квартале. Driver-Out (1) Определить ODD | Требование к продукту Разработка аппаратной и программной архитектуры. MRC и надзор. Проверка и валидация Этап разработки автономии 1 – Определение требований Этап 3 – Проверка системы (2) Продукт | Требования FuSa, аппаратное и программное обеспечение | Принятие критериев, выпуск автономии, проверка системной архитектуры и дизайна системы, оптимизация | Завершение проектирования 1 квартал 2020 г. 4 квартал 2021 г. Этап 2 – Готовность платформы Этап 4 – Проверка системы Анализ воздействия | Интеграция аппаратного и программного обеспечения | Компонент проверки выезда водителя | Проверка на испытательном стенде (1) ODD — область эксплуатационного проектирования — описание конкретных областей эксплуатации, в которых автоматизированная функция или система предназначена для надлежащей работы, включая, помимо прочего, типы дорог, скорость, погоду и другие ограничения области.(2) FuSa — функциональная безопасность — общая безопасность системы или части оборудования, которая зависит от правильной работы автоматической защиты в ответ на ее ввод или отказ предсказуемым образом.
Этап 2 – Готовность платформы Этап 4 – Проверка системы Анализ воздействия | Интеграция аппаратного и программного обеспечения | Компонент проверки выезда водителя | Проверка на испытательном стенде (1) ODD — область эксплуатационного проектирования — описание конкретных областей эксплуатации, в которых автоматизированная функция или система предназначена для надлежащей работы, включая, помимо прочего, типы дорог, скорость, погоду и другие ограничения области.(2) FuSa — функциональная безопасность — общая безопасность системы или части оборудования, которая зависит от правильной работы автоматической защиты в ответ на ее ввод или отказ предсказуемым образом.
Наша непревзойденная способность восприятия на расстоянии 1000 метров Запатентованная способность восприятия на расстоянии 1000 метров Восприятие на расстоянии 1000 метров имеет решающее значение для включения L4 Trucking Полуприцепы весят до 80 000 фунтов и работают в основном на автомагистралях с максимальной скоростью более 75 миль в час. Из-за своего размера и ограниченной маневренности полуприцепам требуется гораздо больше времени, чем легковым автомобилям, для смены полосы движения, поворота налево и торможения.Тормозной путь на максимальной скорости может составлять более 200 метров (примерно расстояние двух футбольных полей), а безопасный левый поворот может занять до 16 секунд, что требует длительного планирования эффективного ускорения и торможения. Только системы LiDAR не обеспечивают достаточных горизонтов планирования, поэтому для автономного грузовика небезопасно совершать незащищенный левый поворот, полагаясь исключительно на LiDAR. Возможности нашей системы восприятия Одной из наиболее важных особенностей технологического стека TuSimple является система восприятия на большом расстоянии.Наш грузовик L4 со скоростью 2 замедления/+разгона (м/с) может воспринимать и понимать дорожную ситуацию на расстоянии до 1000 метров вперед и 300 метров во всех направлениях. Автономное ручное управление обеспечивает горизонт планирования до 35 секунд.
Из-за своего размера и ограниченной маневренности полуприцепам требуется гораздо больше времени, чем легковым автомобилям, для смены полосы движения, поворота налево и торможения.Тормозной путь на максимальной скорости может составлять более 200 метров (примерно расстояние двух футбольных полей), а безопасный левый поворот может занять до 16 секунд, что требует длительного планирования эффективного ускорения и торможения. Только системы LiDAR не обеспечивают достаточных горизонтов планирования, поэтому для автономного грузовика небезопасно совершать незащищенный левый поворот, полагаясь исключительно на LiDAR. Возможности нашей системы восприятия Одной из наиболее важных особенностей технологического стека TuSimple является система восприятия на большом расстоянии.Наш грузовик L4 со скоростью 2 замедления/+разгона (м/с) может воспринимать и понимать дорожную ситуацию на расстоянии до 1000 метров вперед и 300 метров во всех направлениях. Автономное ручное управление обеспечивает горизонт планирования до 35 секунд. На скорости 75 миль в час система автономного вождения § TuSimple полностью загруженного полуприцепа имеет примерно в 2 раза большую кинетическую энергию по сравнению со значительно более эффективным ускорением и торможением по сравнению с водителем-человеком, развивая скорость менее 55 миль в час. Чтобы двигаться на максимальной скорости по шоссе, для безопасной работы L4 необходимо длительное планирование износа тормозов и повышение эффективности использования топлива.TuSimple Perception Suite Кинетическая энергия 2.5E+07 R=70M R=80M 2.0E+07 R=300M R=80M 80 000 фунтов R=500M R = 1 000M 1.5E+07 𝟏𝟏 R=200M R=350M 2 R=250M K.E. = mv 𝟐𝟐 1.0E+07 2x 5.0E+06 Камера R=150M Радар 0.0E+00 Лидар [Джоули] 20 25 30 35 40 45 50 55 60 65 70 75 [ миль в час ] Лучшее в отрасли восприятие на большом расстоянии § Технология камеры обеспечивает изображения и данные с расстояния 1000 метров § Кинетическая энергия полуприцепа с полной загрузкой увеличивается в 2 раза § Собственная технология искусственного интеллекта TuSimple использует изображения и данные для увеличения при скорости 75 миль в час по сравнению со скоростью 55 миль в час § Восприятие 1000 метров и 35-секундные соответствующие решения управления на дороге горизонт планирования имеет решающее значение для безопасной работы на высоких скоростях 7 Распределение %Наша непревзойденная способность восприятия на расстоянии 1000 метров Запатентованная способность восприятия на расстоянии 1000 метров Восприятие на расстоянии 1000 метров имеет решающее значение для обеспечения возможности L4 Trucking Полуприцепы весят до 80 000 фунтов и работают в основном на шоссе с максимальной скоростью более 75 миль в час. Из-за своего размера и ограниченной маневренности полуприцепам требуется гораздо больше времени, чем легковым автомобилям, для смены полосы движения, поворота налево и торможения. Тормозной путь на максимальной скорости может составлять более 200 метров (примерно расстояние двух футбольных полей), а безопасный левый поворот может занять до 16 секунд, что требует длительного планирования эффективного ускорения и торможения. Только системы LiDAR не обеспечивают достаточных горизонтов планирования, поэтому для автономного грузовика небезопасно совершать незащищенный левый поворот, полагаясь исключительно на LiDAR.Возможности нашей системы восприятия Одной из наиболее важных особенностей технологического стека TuSimple является система восприятия на большом расстоянии. Наш грузовик L4 со скоростью 2 замедления/+разгона (м/с) может воспринимать и понимать дорожную ситуацию на расстоянии до 1000 метров вперед и 300 метров во всех направлениях. Автономное ручное управление обеспечивает горизонт планирования до 35 секунд.
На скорости 75 миль в час система автономного вождения § TuSimple полностью загруженного полуприцепа имеет примерно в 2 раза большую кинетическую энергию по сравнению со значительно более эффективным ускорением и торможением по сравнению с водителем-человеком, развивая скорость менее 55 миль в час. Чтобы двигаться на максимальной скорости по шоссе, для безопасной работы L4 необходимо длительное планирование износа тормозов и повышение эффективности использования топлива.TuSimple Perception Suite Кинетическая энергия 2.5E+07 R=70M R=80M 2.0E+07 R=300M R=80M 80 000 фунтов R=500M R = 1 000M 1.5E+07 𝟏𝟏 R=200M R=350M 2 R=250M K.E. = mv 𝟐𝟐 1.0E+07 2x 5.0E+06 Камера R=150M Радар 0.0E+00 Лидар [Джоули] 20 25 30 35 40 45 50 55 60 65 70 75 [ миль в час ] Лучшее в отрасли восприятие на большом расстоянии § Технология камеры обеспечивает изображения и данные с расстояния 1000 метров § Кинетическая энергия полуприцепа с полной загрузкой увеличивается в 2 раза § Собственная технология искусственного интеллекта TuSimple использует изображения и данные для увеличения при скорости 75 миль в час по сравнению со скоростью 55 миль в час § Восприятие 1000 метров и 35-секундные соответствующие решения управления на дороге горизонт планирования имеет решающее значение для безопасной работы на высоких скоростях 7 Распределение %Наша непревзойденная способность восприятия на расстоянии 1000 метров Запатентованная способность восприятия на расстоянии 1000 метров Восприятие на расстоянии 1000 метров имеет решающее значение для обеспечения возможности L4 Trucking Полуприцепы весят до 80 000 фунтов и работают в основном на шоссе с максимальной скоростью более 75 миль в час. Из-за своего размера и ограниченной маневренности полуприцепам требуется гораздо больше времени, чем легковым автомобилям, для смены полосы движения, поворота налево и торможения. Тормозной путь на максимальной скорости может составлять более 200 метров (примерно расстояние двух футбольных полей), а безопасный левый поворот может занять до 16 секунд, что требует длительного планирования эффективного ускорения и торможения. Только системы LiDAR не обеспечивают достаточных горизонтов планирования, поэтому для автономного грузовика небезопасно совершать незащищенный левый поворот, полагаясь исключительно на LiDAR.Возможности нашей системы восприятия Одной из наиболее важных особенностей технологического стека TuSimple является система восприятия на большом расстоянии. Наш грузовик L4 со скоростью 2 замедления/+разгона (м/с) может воспринимать и понимать дорожную ситуацию на расстоянии до 1000 метров вперед и 300 метров во всех направлениях. Автономное ручное управление обеспечивает горизонт планирования до 35 секунд..jpg) На скорости 75 миль в час система автономного вождения § TuSimple полностью загруженного полуприцепа имеет примерно в 2 раза большую кинетическую энергию по сравнению со значительно более эффективным ускорением и торможением по сравнению с водителем-человеком, развивая скорость менее 55 миль в час.Чтобы двигаться на максимальной скорости по шоссе, для безопасной работы L4 необходимо длительное планирование износа тормозов и повышение эффективности использования топлива. TuSimple Perception Suite Кинетическая энергия 2.5E+07 R=70M R=80M 2.0E+07 R=300M R=80M 80 000 фунтов R=500M R = 1 000M 1.5E+07 𝟏𝟏 R=200M R=350M 2 R=250M K.E. = mv 𝟐𝟐 1.0E+07 2x 5.0E+06 Камера R=150M Радар 0.0E+00 Лидар [Джоули] 20 25 30 35 40 45 50 55 60 65 70 75 [ миль в час ] Ведущее в отрасли восприятие на большом расстоянии § Технология камеры обеспечивает изображения и данные с расстояния 1000 метров § Кинетическая энергия полуприцепа с полной загрузкой увеличивается в 2 раза § Собственная технология искусственного интеллекта TuSimple использует изображения и данные для увеличения при скорости 75 миль в час по сравнению со скоростью 55 миль в час § Восприятие 1000 метров и 35-секундные соответствующие решения управления на дороге горизонт планирования имеет решающее значение для безопасной работы на высоких скоростях.
На скорости 75 миль в час система автономного вождения § TuSimple полностью загруженного полуприцепа имеет примерно в 2 раза большую кинетическую энергию по сравнению со значительно более эффективным ускорением и торможением по сравнению с водителем-человеком, развивая скорость менее 55 миль в час.Чтобы двигаться на максимальной скорости по шоссе, для безопасной работы L4 необходимо длительное планирование износа тормозов и повышение эффективности использования топлива. TuSimple Perception Suite Кинетическая энергия 2.5E+07 R=70M R=80M 2.0E+07 R=300M R=80M 80 000 фунтов R=500M R = 1 000M 1.5E+07 𝟏𝟏 R=200M R=350M 2 R=250M K.E. = mv 𝟐𝟐 1.0E+07 2x 5.0E+06 Камера R=150M Радар 0.0E+00 Лидар [Джоули] 20 25 30 35 40 45 50 55 60 65 70 75 [ миль в час ] Ведущее в отрасли восприятие на большом расстоянии § Технология камеры обеспечивает изображения и данные с расстояния 1000 метров § Кинетическая энергия полуприцепа с полной загрузкой увеличивается в 2 раза § Собственная технология искусственного интеллекта TuSimple использует изображения и данные для увеличения при скорости 75 миль в час по сравнению со скоростью 55 миль в час § Восприятие 1000 метров и 35-секундные соответствующие решения управления на дороге горизонт планирования имеет решающее значение для безопасной работы на высоких скоростях. Восприятие на основе технологии.Наша архитектура, ориентированная на камеры, объединяет несколько датчиков (камеры, лидары и радары) с технологией компьютерного зрения TuSimple, обрабатывая 600 триллионов операций в секунду. Мы сотрудничали с Sony, чтобы использовать ее новейшую технологию CMOS для разработки запатентованной системы камер с превосходным ночным видением. Наша технология Computer Vision побила 10 мировых рекордов, заняв первое место в KITTI, Cityscapes и в открытом наборе данных Waymo 2020 для восприятия 2D. Решение искусственного интеллекта для восприятия Недостаточно видеть: запатентованная интерпретация ИИ Наша система восприятия предоставляет обширную контекстную информацию о дорожных условиях и поведении других участников дорожного движения, что очень важно для безопасности.Наш грузовик L4 знает не только о других транспортных средствах, но и о расстоянии до них, скорости и типе транспортного средства. Кроме того, он пытается предсказать их намерения и будущие маневры. Система также выполняет обширную классификацию сценариев, чтобы понять весь контекст технологии центрирования полосы движения, как никто другой на дороге. Конечный результат: непревзойденные возможности TuSimple Наше восприятие на расстоянии 1000 метров позволило нам стать единственной компанией по перевозке беспилотных автомобилей, которая продемонстрировала автономные операции как на наземных улицах, так и на автомагистралях со скоростью до 75 миль в час, позиционируя нас как лидера отрасли.8 Распространение %Наша непревзойденная способность восприятия на расстоянии 1000 метров (продолжение) Рекордное компьютерное зрение TuSimple Мы разработали современную систему для восприятия на основе технологии изображения. Наша архитектура, ориентированная на камеры, объединяет несколько датчиков (камеры, лидары и радары) с технологией компьютерного зрения TuSimple, обрабатывая 600 триллионов операций в секунду. Мы сотрудничали с Sony, чтобы использовать ее новейшую технологию CMOS для разработки запатентованной системы камер с превосходным ночным видением. Наша технология Computer Vision побила 10 мировых рекордов, заняв первое место в KITTI, Cityscapes и в открытом наборе данных Waymo 2020 для восприятия 2D. Решение искусственного интеллекта для восприятия Недостаточно видеть: запатентованная интерпретация ИИ Наша система восприятия предоставляет обширную контекстную информацию о дорожных условиях и поведении других участников дорожного движения, что очень важно для безопасности. Наш грузовик L4 знает не только о других транспортных средствах, но и о расстоянии до них, скорости и типе транспортного средства. Кроме того, он пытается предсказать их намерения и будущие маневры.Система также выполняет обширную классификацию сценариев, чтобы понять весь контекст технологии центрирования полосы движения, как никто другой на дороге. Конечный результат: непревзойденные возможности TuSimple Наше восприятие на расстоянии 1000 метров позволило нам стать единственной компанией по перевозке беспилотных автомобилей, которая продемонстрировала автономные операции как на наземных улицах, так и на автомагистралях со скоростью до 75 миль в час, позиционируя нас как лидера отрасли.
Восприятие на основе технологии.Наша архитектура, ориентированная на камеры, объединяет несколько датчиков (камеры, лидары и радары) с технологией компьютерного зрения TuSimple, обрабатывая 600 триллионов операций в секунду. Мы сотрудничали с Sony, чтобы использовать ее новейшую технологию CMOS для разработки запатентованной системы камер с превосходным ночным видением. Наша технология Computer Vision побила 10 мировых рекордов, заняв первое место в KITTI, Cityscapes и в открытом наборе данных Waymo 2020 для восприятия 2D. Решение искусственного интеллекта для восприятия Недостаточно видеть: запатентованная интерпретация ИИ Наша система восприятия предоставляет обширную контекстную информацию о дорожных условиях и поведении других участников дорожного движения, что очень важно для безопасности.Наш грузовик L4 знает не только о других транспортных средствах, но и о расстоянии до них, скорости и типе транспортного средства. Кроме того, он пытается предсказать их намерения и будущие маневры. Система также выполняет обширную классификацию сценариев, чтобы понять весь контекст технологии центрирования полосы движения, как никто другой на дороге. Конечный результат: непревзойденные возможности TuSimple Наше восприятие на расстоянии 1000 метров позволило нам стать единственной компанией по перевозке беспилотных автомобилей, которая продемонстрировала автономные операции как на наземных улицах, так и на автомагистралях со скоростью до 75 миль в час, позиционируя нас как лидера отрасли.8 Распространение %Наша непревзойденная способность восприятия на расстоянии 1000 метров (продолжение) Рекордное компьютерное зрение TuSimple Мы разработали современную систему для восприятия на основе технологии изображения. Наша архитектура, ориентированная на камеры, объединяет несколько датчиков (камеры, лидары и радары) с технологией компьютерного зрения TuSimple, обрабатывая 600 триллионов операций в секунду. Мы сотрудничали с Sony, чтобы использовать ее новейшую технологию CMOS для разработки запатентованной системы камер с превосходным ночным видением. Наша технология Computer Vision побила 10 мировых рекордов, заняв первое место в KITTI, Cityscapes и в открытом наборе данных Waymo 2020 для восприятия 2D. Решение искусственного интеллекта для восприятия Недостаточно видеть: запатентованная интерпретация ИИ Наша система восприятия предоставляет обширную контекстную информацию о дорожных условиях и поведении других участников дорожного движения, что очень важно для безопасности. Наш грузовик L4 знает не только о других транспортных средствах, но и о расстоянии до них, скорости и типе транспортного средства. Кроме того, он пытается предсказать их намерения и будущие маневры.Система также выполняет обширную классификацию сценариев, чтобы понять весь контекст технологии центрирования полосы движения, как никто другой на дороге. Конечный результат: непревзойденные возможности TuSimple Наше восприятие на расстоянии 1000 метров позволило нам стать единственной компанией по перевозке беспилотных автомобилей, которая продемонстрировала автономные операции как на наземных улицах, так и на автомагистралях со скоростью до 75 миль в час, позиционируя нас как лидера отрасли. 8 Распределение, %
8 Распределение, %
Коммерческие операции: Доход в масштабе здания Мили (тысячи) Все цифры указаны в тысячах, если не указано иное 603 ~3.5x г/г Ключевые операционные показатели 4 кв. 20 г. 1 кв. 21 г. Рост в квартальном исчислении % Всего забронированных грузовиков EOQ ~4,6 ~5,8 26% Выручка Мили ~600 ~603 0,4% 173 (1) Общее количество картированных миль EOQ ~4 ~5 32% 1 кв. 20 1 кв. ’21 AFN расширяется, чтобы удовлетворить потребности наших стратегических клиентов Наше коммерческое присутствие в AFN продолжало расти в первом квартале. Мы осуществили доставку, приносящую доход, примерно на 25 уникальных пользовательских терминалов AFN и запустили два новых крупных коммерческих грузовых маршрута с кумулятивными картированными милями AFN из Далласа в Остин и из Далласа в Сан-Антонио. К концу 2021 года грузовые перевозки будут продолжать расширяться вплоть до восточного побережья по коридорам I-10, I-20, 5000 I-30 и I-40, чтобы удовлетворить потребности стратегических клиентов примерно в 5 раз больше, чем в предыдущем году. В течение 2021 года мы будем запускать операции с опережением графика в крупных транспортных узлах, таких как Орландо, Шарлотта и Мемфис. 1,000 TuSimple стремится расширять наше коммерческое присутствие, создавая глубокую книгу взаимоотношений с клиентами с ручными грузовыми маршрутами, готовыми к преобразованию Q1’20 Q1’21 в автономные маршруты в 2024 году. Доставка грузов 24 часа в сутки 7 дней в неделю дает нашей команде реальное понимание проблем, с которыми сталкиваются наши клиенты, что позволяет нам совершенствовать наши продукты и готовить наших клиентов к автономии тестирования и коммерческого развертывания.Мы продолжим работать на высоком уровне обслуживания, безопасно доставляя грузы, а также тестируя нашу систему автономного вождения. 2 грузовика 50 грузовиков 20 грузовиков Инфраструктура AFN развивается параллельно с грузовыми операциями Для поддержки грузовых перевозок по AFN в первом квартале TuSimple использовала 4 специализированных терминала с двумя терминалами с полным спектром услуг в Тусоне и Далласе.
В течение 2021 года мы будем запускать операции с опережением графика в крупных транспортных узлах, таких как Орландо, Шарлотта и Мемфис. 1,000 TuSimple стремится расширять наше коммерческое присутствие, создавая глубокую книгу взаимоотношений с клиентами с ручными грузовыми маршрутами, готовыми к преобразованию Q1’20 Q1’21 в автономные маршруты в 2024 году. Доставка грузов 24 часа в сутки 7 дней в неделю дает нашей команде реальное понимание проблем, с которыми сталкиваются наши клиенты, что позволяет нам совершенствовать наши продукты и готовить наших клиентов к автономии тестирования и коммерческого развертывания.Мы продолжим работать на высоком уровне обслуживания, безопасно доставляя грузы, а также тестируя нашу систему автономного вождения. 2 грузовика 50 грузовиков 20 грузовиков Инфраструктура AFN развивается параллельно с грузовыми операциями Для поддержки грузовых перевозок по AFN в первом квартале TuSimple использовала 4 специализированных терминала с двумя терминалами с полным спектром услуг в Тусоне и Далласе. Наш терминал в Тусоне в настоящее время подвергается значительному расширению, и мы близимся к завершению строительства 5 терминалов в Форт-Уэрте, штат Техас, Ø для операций по тестированию и получению доходов, открытие которых запланировано на второй квартал 2021 года.Наши специальные терминалы дополняют наши маршруты к терминалам Ø тестирования наших клиентов AFN и обратно. Ø Шанхайская экспериментальная программа порта 9 (1) Совокупное количество уникальных миль на AFN, на котором мы построили карту, совместимую с нашим программным обеспечением для автономного вождения. ~3,5x г/г Основные операционные показатели Q4’20 Q1’21 QoQ Рост % Всего забронированных грузовиков EOQ ~4,6 ~5,8 26% Выручка Мили ~600 ~603 0.4% 173 (1) Общее количество пройденных миль EOQ ~4 ~5 32% Q1’20 Q1’21 AFN расширяется, чтобы удовлетворить потребности наших стратегических клиентов Наше коммерческое присутствие AFN продолжало расти в первом квартале. Мы осуществили доставку, приносящую доход, примерно на 25 уникальных пользовательских терминалов AFN и запустили два новых крупных коммерческих грузовых маршрута с кумулятивными картированными милями AFN из Далласа в Остин и из Далласа в Сан-Антонио.
Наш терминал в Тусоне в настоящее время подвергается значительному расширению, и мы близимся к завершению строительства 5 терминалов в Форт-Уэрте, штат Техас, Ø для операций по тестированию и получению доходов, открытие которых запланировано на второй квартал 2021 года.Наши специальные терминалы дополняют наши маршруты к терминалам Ø тестирования наших клиентов AFN и обратно. Ø Шанхайская экспериментальная программа порта 9 (1) Совокупное количество уникальных миль на AFN, на котором мы построили карту, совместимую с нашим программным обеспечением для автономного вождения. ~3,5x г/г Основные операционные показатели Q4’20 Q1’21 QoQ Рост % Всего забронированных грузовиков EOQ ~4,6 ~5,8 26% Выручка Мили ~600 ~603 0.4% 173 (1) Общее количество пройденных миль EOQ ~4 ~5 32% Q1’20 Q1’21 AFN расширяется, чтобы удовлетворить потребности наших стратегических клиентов Наше коммерческое присутствие AFN продолжало расти в первом квартале. Мы осуществили доставку, приносящую доход, примерно на 25 уникальных пользовательских терминалов AFN и запустили два новых крупных коммерческих грузовых маршрута с кумулятивными картированными милями AFN из Далласа в Остин и из Далласа в Сан-Антонио. К концу 2021 года грузовые перевозки будут продолжать расширяться вплоть до восточного побережья по коридорам I-10, I-20, 5000 I-30 и I-40, чтобы удовлетворить потребности стратегических клиентов примерно в 5 раз больше, чем в предыдущем году.В течение 2021 года мы будем запускать операции с опережением графика в крупных транспортных узлах, таких как Орландо, Шарлотта и Мемфис. 1,000 TuSimple стремится расширять наше коммерческое присутствие, создавая глубокую книгу взаимоотношений с клиентами с ручными грузовыми маршрутами, готовыми к преобразованию Q1’20 Q1’21 в автономные маршруты в 2024 году. Доставка грузов 24 часа в сутки 7 дней в неделю дает нашей команде реальное понимание проблем, с которыми сталкиваются наши клиенты, что позволяет нам совершенствовать наши продукты и готовить наших клиентов к автономии тестирования и коммерческого развертывания.Мы продолжим работать на высоком уровне обслуживания, безопасно доставляя грузы, а также тестируя нашу систему автономного вождения. 2 грузовика 50 грузовиков 20 грузовиков Инфраструктура AFN развивается параллельно с грузовыми операциями Для поддержки грузовых перевозок по AFN в первом квартале TuSimple использовала 4 специализированных терминала с двумя терминалами с полным спектром услуг в Тусоне и Далласе.
К концу 2021 года грузовые перевозки будут продолжать расширяться вплоть до восточного побережья по коридорам I-10, I-20, 5000 I-30 и I-40, чтобы удовлетворить потребности стратегических клиентов примерно в 5 раз больше, чем в предыдущем году.В течение 2021 года мы будем запускать операции с опережением графика в крупных транспортных узлах, таких как Орландо, Шарлотта и Мемфис. 1,000 TuSimple стремится расширять наше коммерческое присутствие, создавая глубокую книгу взаимоотношений с клиентами с ручными грузовыми маршрутами, готовыми к преобразованию Q1’20 Q1’21 в автономные маршруты в 2024 году. Доставка грузов 24 часа в сутки 7 дней в неделю дает нашей команде реальное понимание проблем, с которыми сталкиваются наши клиенты, что позволяет нам совершенствовать наши продукты и готовить наших клиентов к автономии тестирования и коммерческого развертывания.Мы продолжим работать на высоком уровне обслуживания, безопасно доставляя грузы, а также тестируя нашу систему автономного вождения. 2 грузовика 50 грузовиков 20 грузовиков Инфраструктура AFN развивается параллельно с грузовыми операциями Для поддержки грузовых перевозок по AFN в первом квартале TuSimple использовала 4 специализированных терминала с двумя терминалами с полным спектром услуг в Тусоне и Далласе. Наш терминал в Тусоне в настоящее время подвергается значительному расширению, и мы близимся к завершению строительства 5 терминалов в Форт-Уэрте, штат Техас, Ø для операций по тестированию и получению доходов, открытие которых запланировано на второй квартал 2021 года.Наши специальные терминалы дополняют наши маршруты к терминалам Ø тестирования наших клиентов AFN и обратно. Ø Шанхайская пилотная программа 9 (1) Совокупное количество уникальных миль на AFN, на котором мы построили карту, совместимую с нашим программным обеспечением для автономного вождения США с опережением графика Наше расширение AFN идет с опережением графика. В первом квартале мы нанесли на карту около 1200 миль новых полос, завершающих техасский треугольник и доведя нашу совокупную нанесенную на карту сеть примерно до 5000 миль, простираясь от Финикса до Далласа и Хьюстона по шоссе I-10 и I-20 и расширяясь на юго-восток до Мемфиса, Атланта. , Шарлотта и Орландо к концу 2021 года.К концу 2021 года автономная грузовая сеть расширится до восточного побережья Сиэтл Портленд Миннеаполис Бостон Кливленд Нью-Йорк Солт-Лейк-Сити Чикаго Филадельфия Сан-Франциско Питтсбург/Окленд Цинциннати Канзас-Сити Сент-Луис Денвер Норфолк Нэшвилл Гринсборо Оклахома-Сити Мемфис Лос-Анджелес Шарлотта Феникс / Лонг-Бич Тусон Атланта Эль-Пасо Сан-Диего Даллас Джексонвилл Орландо Новый Орлеан Сан-Антонио Хьюстон Тампа Ларедо Планы расширения терминала Нормативная среда Автономные коммерческие маршруты L4 Текущие маршруты 24 операционных штатов Ближайшие планы расширения [ 2021 ] Автономные испытания L4 43 штата Планы будущих расширений [ 2022 – 2024 ] In Прогресс 10Коммерческие операции: Масштаб строительства (продолжение) Быстрое расширение на юге США с опережением графика Наше расширение AFN опережает график.
Наш терминал в Тусоне в настоящее время подвергается значительному расширению, и мы близимся к завершению строительства 5 терминалов в Форт-Уэрте, штат Техас, Ø для операций по тестированию и получению доходов, открытие которых запланировано на второй квартал 2021 года.Наши специальные терминалы дополняют наши маршруты к терминалам Ø тестирования наших клиентов AFN и обратно. Ø Шанхайская пилотная программа 9 (1) Совокупное количество уникальных миль на AFN, на котором мы построили карту, совместимую с нашим программным обеспечением для автономного вождения США с опережением графика Наше расширение AFN идет с опережением графика. В первом квартале мы нанесли на карту около 1200 миль новых полос, завершающих техасский треугольник и доведя нашу совокупную нанесенную на карту сеть примерно до 5000 миль, простираясь от Финикса до Далласа и Хьюстона по шоссе I-10 и I-20 и расширяясь на юго-восток до Мемфиса, Атланта. , Шарлотта и Орландо к концу 2021 года.К концу 2021 года автономная грузовая сеть расширится до восточного побережья Сиэтл Портленд Миннеаполис Бостон Кливленд Нью-Йорк Солт-Лейк-Сити Чикаго Филадельфия Сан-Франциско Питтсбург/Окленд Цинциннати Канзас-Сити Сент-Луис Денвер Норфолк Нэшвилл Гринсборо Оклахома-Сити Мемфис Лос-Анджелес Шарлотта Феникс / Лонг-Бич Тусон Атланта Эль-Пасо Сан-Диего Даллас Джексонвилл Орландо Новый Орлеан Сан-Антонио Хьюстон Тампа Ларедо Планы расширения терминала Нормативная среда Автономные коммерческие маршруты L4 Текущие маршруты 24 операционных штатов Ближайшие планы расширения [ 2021 ] Автономные испытания L4 43 штата Планы будущих расширений [ 2022 – 2024 ] In Прогресс 10Коммерческие операции: Масштаб строительства (продолжение) Быстрое расширение на юге США с опережением графика Наше расширение AFN опережает график. В первом квартале мы нанесли на карту около 1200 миль новых полос, завершающих техасский треугольник и доведя нашу совокупную нанесенную на карту сеть примерно до 5000 миль, простираясь от Финикса до Далласа и Хьюстона по шоссе I-10 и I-20 и расширяясь на юго-восток до Мемфиса, Атланта. , Шарлотта и Орландо к концу 2021 года. Автономная грузовая сеть расширяется на восточное побережье к концу 2021 года Сиэтл Портленд Миннеаполис Бостон Кливленд Нью-Йорк Солт-Лейк-Сити Чикаго Филадельфия Сан-Франциско Питтсбург / Окленд Цинциннати Канзас-Сити Сент-ЛуисЛуи Денвер Норфолк Нэшвилл Гринсборо Оклахома-Сити Мемфис Лос-Анджелес Шарлотта Феникс / Лонг-Бич Тусон Атланта Эль-Пасо Сан-Диего Даллас Джексонвилл Орландо Новый Орлеан Сан-Антонио Хьюстон Тампа Ларедо Планы расширения терминала Нормативная среда L4 Автономный коммерческий Текущие маршруты 24 штатов эксплуатации Ближайшие планы расширения [ 2021 ] L4 Автономное тестирование 43 штата Планы будущего расширения [ 2022 – 2024] В процессе 10
В первом квартале мы нанесли на карту около 1200 миль новых полос, завершающих техасский треугольник и доведя нашу совокупную нанесенную на карту сеть примерно до 5000 миль, простираясь от Финикса до Далласа и Хьюстона по шоссе I-10 и I-20 и расширяясь на юго-восток до Мемфиса, Атланта. , Шарлотта и Орландо к концу 2021 года. Автономная грузовая сеть расширяется на восточное побережье к концу 2021 года Сиэтл Портленд Миннеаполис Бостон Кливленд Нью-Йорк Солт-Лейк-Сити Чикаго Филадельфия Сан-Франциско Питтсбург / Окленд Цинциннати Канзас-Сити Сент-ЛуисЛуи Денвер Норфолк Нэшвилл Гринсборо Оклахома-Сити Мемфис Лос-Анджелес Шарлотта Феникс / Лонг-Бич Тусон Атланта Эль-Пасо Сан-Диего Даллас Джексонвилл Орландо Новый Орлеан Сан-Антонио Хьюстон Тампа Ларедо Планы расширения терминала Нормативная среда L4 Автономный коммерческий Текущие маршруты 24 штатов эксплуатации Ближайшие планы расширения [ 2021 ] L4 Автономное тестирование 43 штата Планы будущего расширения [ 2022 – 2024] В процессе 10
г) автотранспортная техника, поэтому Ю. S. Xpress находится в числе первых в очереди на бронирование». Значительная книга бронирований клиентов с «голубыми фишками» (1) — Эрик Фуллер Мы увеличили количество бронирований на 1200 в первом квартале и добавили президента и главного исполнительного директора, еще 1000 в апреле. В настоящее время у нас есть 6 775 бронирований U.S. Xpress для мощностей, принадлежащих перевозчику, с заказами примерно от дюжины крупных грузоотправителей, перевозчиков и арендодателей грузовых автомобилей, включая Penske, Schneider и U.S. Xpress. Наша программа бронирования дает избранным клиентам возможность зарезервировать грузовики для развертывания на AFN, начиная с 2024 года.Мы тесно сотрудничаем с нашими партнерами по бронированию, чтобы определить их потребности в сети и подготовить выбранные полосы уже сегодня, чтобы снизить риски перехода на автономию для решения «подключи и работай», когда грузовики сойдут с конвейера в 2024 году. Мы находимся на этапах предварительной подготовки к расширению.
S. Xpress находится в числе первых в очереди на бронирование». Значительная книга бронирований клиентов с «голубыми фишками» (1) — Эрик Фуллер Мы увеличили количество бронирований на 1200 в первом квартале и добавили президента и главного исполнительного директора, еще 1000 в апреле. В настоящее время у нас есть 6 775 бронирований U.S. Xpress для мощностей, принадлежащих перевозчику, с заказами примерно от дюжины крупных грузоотправителей, перевозчиков и арендодателей грузовых автомобилей, включая Penske, Schneider и U.S. Xpress. Наша программа бронирования дает избранным клиентам возможность зарезервировать грузовики для развертывания на AFN, начиная с 2024 года.Мы тесно сотрудничаем с нашими партнерами по бронированию, чтобы определить их потребности в сети и подготовить выбранные полосы уже сегодня, чтобы снизить риски перехода на автономию для решения «подключи и работай», когда грузовики сойдут с конвейера в 2024 году. Мы находимся на этапах предварительной подготовки к расширению. наша программа резервирования для все еще избранной группы высококачественных, современных грузовых автомобилей. Бронирование надежных грузовиков партнерами Blue Chip +17% 6 775 53% +26% 5 775 4 575 30% 6 775 бронирований на 10.05.2021 17% Железнодорожный транспорт | Интермодальный перевозчик Грузоотправитель | Перевозчик посылок 4 кв. 20 кв. вне и масштаб передовых технологий в будет работать вместе, чтобы лучше понять, как автономные грузоперевозки и логистической отрасли.Эти технологии сотрудничества работают по сравнению с теми же типами с TuSimple, что улучшит наши текущие усилия по разработке индивидуальных страховых решений для грузовиков, управляемых вручную водителями. Мы верим, что компании, эксплуатирующие парки автономных транспортных средств, получают огромные преимущества от автономных транспортных средств сегодня и в будущем». сыграют жизненно важную роль в сокращении числа смертельных случаев, связанных с грузовиками в будущем. — Дэвид Блессинг, главный специалист по андеррайтингу Liberty Mutual 11 (1) Оговорки не имеют обязательной силы.
наша программа резервирования для все еще избранной группы высококачественных, современных грузовых автомобилей. Бронирование надежных грузовиков партнерами Blue Chip +17% 6 775 53% +26% 5 775 4 575 30% 6 775 бронирований на 10.05.2021 17% Железнодорожный транспорт | Интермодальный перевозчик Грузоотправитель | Перевозчик посылок 4 кв. 20 кв. вне и масштаб передовых технологий в будет работать вместе, чтобы лучше понять, как автономные грузоперевозки и логистической отрасли.Эти технологии сотрудничества работают по сравнению с теми же типами с TuSimple, что улучшит наши текущие усилия по разработке индивидуальных страховых решений для грузовиков, управляемых вручную водителями. Мы верим, что компании, эксплуатирующие парки автономных транспортных средств, получают огромные преимущества от автономных транспортных средств сегодня и в будущем». сыграют жизненно важную роль в сокращении числа смертельных случаев, связанных с грузовиками в будущем. — Дэвид Блессинг, главный специалист по андеррайтингу Liberty Mutual 11 (1) Оговорки не имеют обязательной силы. Как правило, для каждого бронирования требуется залог грузовика в размере 500 долларов США, однако требование депозита было отменено для наших инвесторов в акционерный капитал, которые в настоящее время держат резервы. «Мы работаем с TuSimple с 2019 года и считаем их явным лидером в автономных коммерческих операциях: Масштабируйте (продолжение) технологию грузоперевозок, поэтому US Xpress находится в числе первых в очереди на бронирование». Значительная книга бронирований клиентов с «голубыми фишками» (1) — Эрик Фуллер Мы увеличили количество бронирований на 1200 в первом квартале и добавили президента и главного исполнительного директора, еще 1000 в апреле.В настоящее время у нас есть 6 775 бронирований U.S. Xpress для мощностей, принадлежащих перевозчику, с заказами примерно от дюжины крупных грузоотправителей, перевозчиков и арендодателей грузовых автомобилей, включая Penske, Schneider и U.S. Xpress. Наша программа резервирования дает избранным клиентам возможность зарезервировать грузовики для развертывания на AFN, начиная с 2024 года.
Как правило, для каждого бронирования требуется залог грузовика в размере 500 долларов США, однако требование депозита было отменено для наших инвесторов в акционерный капитал, которые в настоящее время держат резервы. «Мы работаем с TuSimple с 2019 года и считаем их явным лидером в автономных коммерческих операциях: Масштабируйте (продолжение) технологию грузоперевозок, поэтому US Xpress находится в числе первых в очереди на бронирование». Значительная книга бронирований клиентов с «голубыми фишками» (1) — Эрик Фуллер Мы увеличили количество бронирований на 1200 в первом квартале и добавили президента и главного исполнительного директора, еще 1000 в апреле.В настоящее время у нас есть 6 775 бронирований U.S. Xpress для мощностей, принадлежащих перевозчику, с заказами примерно от дюжины крупных грузоотправителей, перевозчиков и арендодателей грузовых автомобилей, включая Penske, Schneider и U.S. Xpress. Наша программа резервирования дает избранным клиентам возможность зарезервировать грузовики для развертывания на AFN, начиная с 2024 года. Мы тесно сотрудничаем с нашими партнерами по резервированию, чтобы определить их потребности в сети и подготовить выбранные полосы уже сегодня, чтобы снизить риск принятия автономии для plug and play. решение, когда грузовики сойдут с конвейера в 2024 году.Мы находимся на стадии предварительной подготовки к расширению нашей программы резервирования на все еще избранную группу высококачественных и современных грузовых автомобилей. Бронирование надежных грузовиков партнерами Blue Chip +17% 6 775 53% +26% 5 775 4 575 30% 6 775 бронирований на 10.05.2021 17% Железнодорожный транспорт | Интермодальный перевозчик Грузоотправитель | Перевозчик посылок 4 кв. 20 кв. вне и масштаб передовых технологий в будет работать вместе, чтобы лучше понять, как автономные грузоперевозки и логистической отрасли.Эти технологии сотрудничества работают по сравнению с теми же типами с TuSimple, что улучшит наши текущие усилия по разработке индивидуальных страховых решений для грузовиков, управляемых вручную водителями.
Мы тесно сотрудничаем с нашими партнерами по резервированию, чтобы определить их потребности в сети и подготовить выбранные полосы уже сегодня, чтобы снизить риск принятия автономии для plug and play. решение, когда грузовики сойдут с конвейера в 2024 году.Мы находимся на стадии предварительной подготовки к расширению нашей программы резервирования на все еще избранную группу высококачественных и современных грузовых автомобилей. Бронирование надежных грузовиков партнерами Blue Chip +17% 6 775 53% +26% 5 775 4 575 30% 6 775 бронирований на 10.05.2021 17% Железнодорожный транспорт | Интермодальный перевозчик Грузоотправитель | Перевозчик посылок 4 кв. 20 кв. вне и масштаб передовых технологий в будет работать вместе, чтобы лучше понять, как автономные грузоперевозки и логистической отрасли.Эти технологии сотрудничества работают по сравнению с теми же типами с TuSimple, что улучшит наши текущие усилия по разработке индивидуальных страховых решений для грузовиков, управляемых вручную водителями. Мы верим, что компании, эксплуатирующие парки автономных транспортных средств, получают огромные преимущества от автономных транспортных средств сегодня и в будущем». сыграют жизненно важную роль в сокращении числа смертельных случаев, связанных с грузовиками в будущем. — Дэвид Блессинг, главный специалист по андеррайтингу Liberty Mutual 11 (1) Оговорки не имеют обязательной силы.Как правило, каждое бронирование требует залога грузовика в размере 500 долларов США, однако требование депозита было отменено для наших инвесторов в акционерный капитал, которые в настоящее время держат резервирование.
Мы верим, что компании, эксплуатирующие парки автономных транспортных средств, получают огромные преимущества от автономных транспортных средств сегодня и в будущем». сыграют жизненно важную роль в сокращении числа смертельных случаев, связанных с грузовиками в будущем. — Дэвид Блессинг, главный специалист по андеррайтингу Liberty Mutual 11 (1) Оговорки не имеют обязательной силы.Как правило, каждое бронирование требует залога грузовика в размере 500 долларов США, однако требование депозита было отменено для наших инвесторов в акционерный капитал, которые в настоящее время держат резервирование.
Наши финансовые показатели: инвестиции в рост Доход (млн долл. США) 0,9 долл. США Расширение AFN способствует росту доходов примерно в 3 раза по сравнению с аналогичным периодом прошлого года Общий доход составил ~944 000 долл. США в первом квартале 2021 г., что примерно в 4 раза больше, чем на 0,7 долл. США в год. У нас также был сильный последовательный рост выручки: выручка на 0,6 доллара США увеличилась на 207 000 долларов США, или 28%, с четвертого квартала 2020 года до первого квартала 28% 2021 года. Мы добились устойчивого роста выручки за счет увеличения коммерческого использования нашего парка и наших 26% парков партнеров по цене $0,3 $0,3, которые дополняют наши мощности. 122% 2% Инвестиции в НИОКР ускоряются вместе с технологиями 1 кв. 20 кв. 20 20 кв. 3 ’20 кв. 4 ’20 1 кв. зависит от совершенствования существенных технических прорывов, которых мы достигли. Расходы на исследования и разработки (млн долларов США) В первом квартале мы потратили 41 миллион долларов США на исследования и разработки, что на 23 миллиона долларов больше, чем в прошлом году (41 доллар США).4 года. Наша самая большая часть расходов на исследования и разработки составила 25 миллионов долларов США, примерно в 2 раза больше, чем в предыдущем году, связанных с персоналом, занимающимся исследованиями и разработками, включая компенсационные расходы в размере 31,8 долларов США, основанные на акциях, в размере 2 миллионов долларов США. $28,0 $22,0 Увеличение операционных расходов для поддержки коммерциализации $18,2 30% 13% Мы продолжаем увеличивать наши расходы на общие и 28% административные расходы (G&A), чтобы масштабировать нашу общую 21%-ю организацию и развивать наш широкий круг ведущих в отрасли партнеров.
Мы добились устойчивого роста выручки за счет увеличения коммерческого использования нашего парка и наших 26% парков партнеров по цене $0,3 $0,3, которые дополняют наши мощности. 122% 2% Инвестиции в НИОКР ускоряются вместе с технологиями 1 кв. 20 кв. 20 20 кв. 3 ’20 кв. 4 ’20 1 кв. зависит от совершенствования существенных технических прорывов, которых мы достигли. Расходы на исследования и разработки (млн долларов США) В первом квартале мы потратили 41 миллион долларов США на исследования и разработки, что на 23 миллиона долларов больше, чем в прошлом году (41 доллар США).4 года. Наша самая большая часть расходов на исследования и разработки составила 25 миллионов долларов США, примерно в 2 раза больше, чем в предыдущем году, связанных с персоналом, занимающимся исследованиями и разработками, включая компенсационные расходы в размере 31,8 долларов США, основанные на акциях, в размере 2 миллионов долларов США. $28,0 $22,0 Увеличение операционных расходов для поддержки коммерциализации $18,2 30% 13% Мы продолжаем увеличивать наши расходы на общие и 28% административные расходы (G&A), чтобы масштабировать нашу общую 21%-ю организацию и развивать наш широкий круг ведущих в отрасли партнеров. Мы нанимаем сотрудников по многим ключевым (1) Q1’20 Q2’20 Q3’20 Q4’20 Q1’21 Q1’21 функции, которые решают такие вопросы, как регулирование и AFN (1) Скорректированные расходы на исследования и разработки Q3’20 исключают неденежные расходы, связанные с выпуск § 8% 21% 28% 13% 30% операций.варрантов TRATON на сумму 32 млн долл. США. Наши общие и административные расходы выросли на 9 млн долл. США по сравнению с прошлым годом и составили 15 млн долл. США в первом квартале. Наши самые значительные общие и административные расходы составили 13 миллионов долларов США в виде расходов на персонал, связанных с управленческой и административной деятельностью, общие и административные расходы (миллион долларов США), включая 4 миллиона долларов США в виде компенсации, основанной на акциях. $15,3 $15,2 ~2x г/г $10,1 $6,7 $5,2 51% 193% (34)% (23)% 1 кв. 20 2 кв. 20 3 кв. 20 4 кв. 20 1 кв. : (%) может не получиться из-за округления. Наши финансовые показатели: инвестиции в рост Доход (млн долларов) $0.
Мы нанимаем сотрудников по многим ключевым (1) Q1’20 Q2’20 Q3’20 Q4’20 Q1’21 Q1’21 функции, которые решают такие вопросы, как регулирование и AFN (1) Скорректированные расходы на исследования и разработки Q3’20 исключают неденежные расходы, связанные с выпуск § 8% 21% 28% 13% 30% операций.варрантов TRATON на сумму 32 млн долл. США. Наши общие и административные расходы выросли на 9 млн долл. США по сравнению с прошлым годом и составили 15 млн долл. США в первом квартале. Наши самые значительные общие и административные расходы составили 13 миллионов долларов США в виде расходов на персонал, связанных с управленческой и административной деятельностью, общие и административные расходы (миллион долларов США), включая 4 миллиона долларов США в виде компенсации, основанной на акциях. $15,3 $15,2 ~2x г/г $10,1 $6,7 $5,2 51% 193% (34)% (23)% 1 кв. 20 2 кв. 20 3 кв. 20 4 кв. 20 1 кв. : (%) может не получиться из-за округления. Наши финансовые показатели: инвестиции в рост Доход (млн долларов) $0. 9 Расширение AFN способствует росту выручки примерно в 3 раза по сравнению с аналогичным периодом прошлого года. Общая выручка составила примерно 944 000 долларов США в первом квартале 2021 года, что примерно в 4 раза больше, чем на 0,7 доллара США в год. У нас также был сильный последовательный рост выручки: выручка на 0,6 доллара США увеличилась на 207 000 долларов США, или 28%, с четвертого квартала 2020 года до первого квартала 28% 2021 года. Мы добились устойчивого роста выручки за счет увеличения коммерческого использования нашего парка и наших 26% парков партнеров по цене $0,3 $0,3, которые дополняют наши мощности. 122% 2% Инвестиции в НИОКР ускоряются вместе с технологиями 1 кв. 20 кв. 20 20 кв. 3 ’20 кв. 4 ’20 1 кв. зависит от совершенствования существенных технических прорывов, которых мы достигли.Расходы на исследования и разработки (млн долларов США) В первом квартале мы потратили 41 миллион долларов США на исследования и разработки, что на 23 миллиона долларов США больше, чем в прошлом году – 41,4 долларов США в год.
9 Расширение AFN способствует росту выручки примерно в 3 раза по сравнению с аналогичным периодом прошлого года. Общая выручка составила примерно 944 000 долларов США в первом квартале 2021 года, что примерно в 4 раза больше, чем на 0,7 доллара США в год. У нас также был сильный последовательный рост выручки: выручка на 0,6 доллара США увеличилась на 207 000 долларов США, или 28%, с четвертого квартала 2020 года до первого квартала 28% 2021 года. Мы добились устойчивого роста выручки за счет увеличения коммерческого использования нашего парка и наших 26% парков партнеров по цене $0,3 $0,3, которые дополняют наши мощности. 122% 2% Инвестиции в НИОКР ускоряются вместе с технологиями 1 кв. 20 кв. 20 20 кв. 3 ’20 кв. 4 ’20 1 кв. зависит от совершенствования существенных технических прорывов, которых мы достигли.Расходы на исследования и разработки (млн долларов США) В первом квартале мы потратили 41 миллион долларов США на исследования и разработки, что на 23 миллиона долларов США больше, чем в прошлом году – 41,4 долларов США в год..jpg) Наша самая большая часть расходов на исследования и разработки составила 25 миллионов долларов США, примерно в 2 раза больше, чем в предыдущем году, связанных с персоналом, занимающимся исследованиями и разработками, включая компенсационные расходы в размере 31,8 долларов США, основанные на акциях, в размере 2 миллионов долларов США. $28,0 $22,0 Увеличение операционных расходов для поддержки коммерциализации $18,2 30% 13% Мы продолжаем увеличивать наши расходы на общие и 28% административные расходы (G&A), чтобы масштабировать нашу общую 21%-ю организацию и развивать наш широкий круг ведущих в отрасли партнеров.Мы нанимаем сотрудников по многим ключевым (1) Q1’20 Q2’20 Q3’20 Q4’20 Q1’21 Q1’21 функции, которые решают такие вопросы, как регулирование и AFN (1) Скорректированные расходы на исследования и разработки Q3’20 исключают неденежные расходы, связанные с выпуск § 8% 21% 28% 13% 30% операций. варрантов TRATON на сумму 32 млн долл. США. Наши общие и административные расходы выросли на 9 млн долл.
Наша самая большая часть расходов на исследования и разработки составила 25 миллионов долларов США, примерно в 2 раза больше, чем в предыдущем году, связанных с персоналом, занимающимся исследованиями и разработками, включая компенсационные расходы в размере 31,8 долларов США, основанные на акциях, в размере 2 миллионов долларов США. $28,0 $22,0 Увеличение операционных расходов для поддержки коммерциализации $18,2 30% 13% Мы продолжаем увеличивать наши расходы на общие и 28% административные расходы (G&A), чтобы масштабировать нашу общую 21%-ю организацию и развивать наш широкий круг ведущих в отрасли партнеров.Мы нанимаем сотрудников по многим ключевым (1) Q1’20 Q2’20 Q3’20 Q4’20 Q1’21 Q1’21 функции, которые решают такие вопросы, как регулирование и AFN (1) Скорректированные расходы на исследования и разработки Q3’20 исключают неденежные расходы, связанные с выпуск § 8% 21% 28% 13% 30% операций. варрантов TRATON на сумму 32 млн долл. США. Наши общие и административные расходы выросли на 9 млн долл. США по сравнению с прошлым годом и составили 15 млн долл. США в первом квартале. Наши самые значительные общие и административные расходы составили 13 миллионов долларов США в виде расходов на персонал, связанных с управленческой и административной деятельностью, общие и административные расходы (миллион долларов США), включая 4 миллиона долларов США в виде компенсации, основанной на акциях.$15,3 $15,2 ~2x г/г $10,1 $6,7 $5,2 51% 193% (34)% (23)% 1 кв. 20 2 кв. 20 3 кв. 20 4 кв. 20 1 кв. : (%) может не учитываться из-за округления
США по сравнению с прошлым годом и составили 15 млн долл. США в первом квартале. Наши самые значительные общие и административные расходы составили 13 миллионов долларов США в виде расходов на персонал, связанных с управленческой и административной деятельностью, общие и административные расходы (миллион долларов США), включая 4 миллиона долларов США в виде компенсации, основанной на акциях.$15,3 $15,2 ~2x г/г $10,1 $6,7 $5,2 51% 193% (34)% (23)% 1 кв. 20 2 кв. 20 3 кв. 20 4 кв. 20 1 кв. : (%) может не учитываться из-за округления
Наши финансовые показатели: Инвестиции в рост (продолжение) Tucson Terminal Operations Капитальные инвестиции для поддержки инфраструктуры AFN Наши капитальные затраты и платежи по капитальной аренде являются инвестициями в развитие нашей AFN и в первую очередь относятся к тестированию нашего флота, терминальным объектам и другому оборудованию, используемому в операциях.В течение первого квартала TuSimple инвестировала в общей сложности 1,2 миллиона долларов США в капитальные затраты, а также 200 000 долларов США в виде основных платежей по капитальной аренде. На конец квартала основные средства (за вычетом накопленной амортизации) и оборудование, финансируемое в рамках капитальной аренды (за вычетом накопленной амортизации), составляли 23 млн долл. США и 5 млн долл. США соответственно. Денежная позиция обеспечивает существенную взлетно-посадочную полосу для развития TuSimple День листинга Мы начали первый квартал с денежными средствами в размере 311 миллионов долларов и закончили квартал с 509 миллионами долларов. Наш чистый расход денежных средств в размере 49 млн долл. США в основном связан с чистым убытком в размере 385 млн долл. США, частично компенсированным неденежным изменением справедливой стоимости обязательств по варрантам на 327 млн долл. США.Мы привлекли 245 миллионов долларов, 183 миллиона долларов от Navistar и TRATON, воспользовавшись своим правом на покупку дополнительных конвертируемых привилегированных акций серии E, и 62 миллиона долларов за счет выпуска погашаемых конвертируемых привилегированных акций. В апреле мы привлекли более 1 миллиарда долларов в ходе IPO.
На конец квартала основные средства (за вычетом накопленной амортизации) и оборудование, финансируемое в рамках капитальной аренды (за вычетом накопленной амортизации), составляли 23 млн долл. США и 5 млн долл. США соответственно. Денежная позиция обеспечивает существенную взлетно-посадочную полосу для развития TuSimple День листинга Мы начали первый квартал с денежными средствами в размере 311 миллионов долларов и закончили квартал с 509 миллионами долларов. Наш чистый расход денежных средств в размере 49 млн долл. США в основном связан с чистым убытком в размере 385 млн долл. США, частично компенсированным неденежным изменением справедливой стоимости обязательств по варрантам на 327 млн долл. США.Мы привлекли 245 миллионов долларов, 183 миллиона долларов от Navistar и TRATON, воспользовавшись своим правом на покупку дополнительных конвертируемых привилегированных акций серии E, и 62 миллиона долларов за счет выпуска погашаемых конвертируемых привилегированных акций. В апреле мы привлекли более 1 миллиарда долларов в ходе IPO. Прогноз на весь 2021 год • Доход в размере 5–7 миллионов долларов США, частично обусловленный ускорением использования нашего автопарка и расширением деятельности партнеров AFN • Инвестиции в исследования и разработки в размере 165–185 миллионов долларов США без учета компенсационных расходов на акции (1) • Расходы на общие и административные расходы в размере 45–55 долларов США млн без учета компенсационных расходов, основанных на акциях (1) • Капитальные затраты в размере 5–8 млн долл. США • Мы ожидаем, что к концу 2021 года денежная позиция превысит 1 долл. США.3B 13 (1) См. раздел «Финансовые показатели не по GAAP» для получения важной информации о показателях не по GAAP, используемых TuSimpleOur Financials: Инвестиции в рост (продолжение) Tucson Terminal Operations Капитальные инвестиции для поддержки инфраструктуры AFN Наши капитальные затраты а платежи по капитальной аренде являются инвестициями в развитие нашей AFN и в первую очередь относятся к тестированию нашего парка, терминальным объектам и другому оборудованию, используемому в операциях.
Прогноз на весь 2021 год • Доход в размере 5–7 миллионов долларов США, частично обусловленный ускорением использования нашего автопарка и расширением деятельности партнеров AFN • Инвестиции в исследования и разработки в размере 165–185 миллионов долларов США без учета компенсационных расходов на акции (1) • Расходы на общие и административные расходы в размере 45–55 долларов США млн без учета компенсационных расходов, основанных на акциях (1) • Капитальные затраты в размере 5–8 млн долл. США • Мы ожидаем, что к концу 2021 года денежная позиция превысит 1 долл. США.3B 13 (1) См. раздел «Финансовые показатели не по GAAP» для получения важной информации о показателях не по GAAP, используемых TuSimpleOur Financials: Инвестиции в рост (продолжение) Tucson Terminal Operations Капитальные инвестиции для поддержки инфраструктуры AFN Наши капитальные затраты а платежи по капитальной аренде являются инвестициями в развитие нашей AFN и в первую очередь относятся к тестированию нашего парка, терминальным объектам и другому оборудованию, используемому в операциях. В течение первого квартала TuSimple инвестировала в общей сложности 1,2 миллиона долларов США в капитальные затраты, а также 200 000 долларов США в виде основных платежей по капитальной аренде.На конец квартала основные средства (за вычетом накопленной амортизации) и оборудование, финансируемое в рамках капитальной аренды (за вычетом накопленной амортизации), составляли 23 млн долл. США и 5 млн долл. США соответственно. Денежная позиция обеспечивает существенную взлетно-посадочную полосу для развития TuSimple День листинга Мы начали первый квартал с денежными средствами в размере 311 миллионов долларов и закончили квартал с 509 миллионами долларов. Наш чистый расход денежных средств в размере 49 млн долл. США в основном связан с чистым убытком в размере 385 млн долл. США, частично компенсированным неденежным изменением справедливой стоимости обязательств по варрантам на 327 млн долл. США.Мы привлекли 245 миллионов долларов, 183 миллиона долларов от Navistar и TRATON, воспользовавшись своим правом на покупку дополнительных конвертируемых привилегированных акций серии E, и 62 миллиона долларов за счет выпуска погашаемых конвертируемых привилегированных акций.
В течение первого квартала TuSimple инвестировала в общей сложности 1,2 миллиона долларов США в капитальные затраты, а также 200 000 долларов США в виде основных платежей по капитальной аренде.На конец квартала основные средства (за вычетом накопленной амортизации) и оборудование, финансируемое в рамках капитальной аренды (за вычетом накопленной амортизации), составляли 23 млн долл. США и 5 млн долл. США соответственно. Денежная позиция обеспечивает существенную взлетно-посадочную полосу для развития TuSimple День листинга Мы начали первый квартал с денежными средствами в размере 311 миллионов долларов и закончили квартал с 509 миллионами долларов. Наш чистый расход денежных средств в размере 49 млн долл. США в основном связан с чистым убытком в размере 385 млн долл. США, частично компенсированным неденежным изменением справедливой стоимости обязательств по варрантам на 327 млн долл. США.Мы привлекли 245 миллионов долларов, 183 миллиона долларов от Navistar и TRATON, воспользовавшись своим правом на покупку дополнительных конвертируемых привилегированных акций серии E, и 62 миллиона долларов за счет выпуска погашаемых конвертируемых привилегированных акций. В апреле мы привлекли более 1 миллиарда долларов в ходе IPO. Прогноз на весь 2021 год • Доход в размере 5–7 миллионов долларов США, частично обусловленный ускорением использования нашего автопарка и расширением деятельности партнеров AFN • Инвестиции в исследования и разработки в размере 165–185 миллионов долларов США без учета компенсационных расходов на акции (1) • Расходы на общие и административные расходы в размере 45–55 долларов США млн без учета компенсационных расходов, основанных на акциях (1) • Капитальные затраты в размере 5–8 млн долл. США • Мы ожидаем, что к концу 2021 года денежная позиция превысит 1 долл. США.3B 13 (1) См. раздел «Финансовые показатели не по GAAP» для получения важной информации о показателях не по GAAP, используемых TuSimple. Мы добились критического прогресса в разработке нашей технологии, и мы уверены, что в этом году мы достигнем ключевых вех, чтобы обеспечить движение по дорогам без водителя. Между тем, мы продолжаем прокладывать путь к масштабному росту доходов за счет наших бизнес-инициатив, дополнений к исполнительному консультативному совету, растущего списка партнеров и создания инфраструктуры нашей AFN.
В апреле мы привлекли более 1 миллиарда долларов в ходе IPO. Прогноз на весь 2021 год • Доход в размере 5–7 миллионов долларов США, частично обусловленный ускорением использования нашего автопарка и расширением деятельности партнеров AFN • Инвестиции в исследования и разработки в размере 165–185 миллионов долларов США без учета компенсационных расходов на акции (1) • Расходы на общие и административные расходы в размере 45–55 долларов США млн без учета компенсационных расходов, основанных на акциях (1) • Капитальные затраты в размере 5–8 млн долл. США • Мы ожидаем, что к концу 2021 года денежная позиция превысит 1 долл. США.3B 13 (1) См. раздел «Финансовые показатели не по GAAP» для получения важной информации о показателях не по GAAP, используемых TuSimple. Мы добились критического прогресса в разработке нашей технологии, и мы уверены, что в этом году мы достигнем ключевых вех, чтобы обеспечить движение по дорогам без водителя. Между тем, мы продолжаем прокладывать путь к масштабному росту доходов за счет наших бизнес-инициатив, дополнений к исполнительному консультативному совету, растущего списка партнеров и создания инфраструктуры нашей AFN. TuSimple поставил перед собой задачу коренным образом изменить масштабную индустрию. Мы создаем набор продуктов, которых раньше не существовало. Мы готовы к вызовам, которые представляет этот новый рубеж, и готовы предоставить творческие решения для успешной интеграции этой технологии в наше общество. TuSimple стремится оставаться скромным и сосредоточен на том, чтобы сделать грузоперевозки более безопасными, экологичными и эффективными. Спасибо за ваше неизменное доверие к TuSimple. В TuSimple мы строим лучший путь вперед.С уважением, Ченг Лу, президент и главный исполнительный директор, Пэт Диллон, финансовый директор 14. Закрытие первого квартала стало определяющим моментом в истории TuSimple. Мы добились критического прогресса в разработке нашей технологии, и мы уверены, что в этом году мы достигнем ключевых вех, чтобы обеспечить движение по дорогам без водителя. Между тем, мы продолжаем прокладывать путь к масштабному росту доходов за счет наших бизнес-инициатив, дополнений к исполнительному консультативному совету, растущего списка партнеров и создания инфраструктуры нашей AFN.
TuSimple поставил перед собой задачу коренным образом изменить масштабную индустрию. Мы создаем набор продуктов, которых раньше не существовало. Мы готовы к вызовам, которые представляет этот новый рубеж, и готовы предоставить творческие решения для успешной интеграции этой технологии в наше общество. TuSimple стремится оставаться скромным и сосредоточен на том, чтобы сделать грузоперевозки более безопасными, экологичными и эффективными. Спасибо за ваше неизменное доверие к TuSimple. В TuSimple мы строим лучший путь вперед.С уважением, Ченг Лу, президент и главный исполнительный директор, Пэт Диллон, финансовый директор 14. Закрытие первого квартала стало определяющим моментом в истории TuSimple. Мы добились критического прогресса в разработке нашей технологии, и мы уверены, что в этом году мы достигнем ключевых вех, чтобы обеспечить движение по дорогам без водителя. Между тем, мы продолжаем прокладывать путь к масштабному росту доходов за счет наших бизнес-инициатив, дополнений к исполнительному консультативному совету, растущего списка партнеров и создания инфраструктуры нашей AFN. TuSimple поставил перед собой задачу коренным образом изменить масштабную индустрию. Мы создаем набор продуктов, которых раньше не существовало. Мы готовы к вызовам, которые представляет этот новый рубеж, и готовы предоставить творческие решения для успешной интеграции этой технологии в наше общество. TuSimple стремится оставаться скромным и сосредоточен на том, чтобы сделать грузоперевозки более безопасными, экологичными и эффективными. Спасибо за ваше неизменное доверие к TuSimple. В TuSimple мы строим лучший путь вперед.С уважением, Ченг Лу Президент и главный исполнительный директор Пэт Диллон Финансовый директор 14
TuSimple поставил перед собой задачу коренным образом изменить масштабную индустрию. Мы создаем набор продуктов, которых раньше не существовало. Мы готовы к вызовам, которые представляет этот новый рубеж, и готовы предоставить творческие решения для успешной интеграции этой технологии в наше общество. TuSimple стремится оставаться скромным и сосредоточен на том, чтобы сделать грузоперевозки более безопасными, экологичными и эффективными. Спасибо за ваше неизменное доверие к TuSimple. В TuSimple мы строим лучший путь вперед.С уважением, Ченг Лу Президент и главный исполнительный директор Пэт Диллон Финансовый директор 14
Веб-трансляция конференции TuSimple — 14:00 PT 10 мая 2021 г. Мы проведем телеконференцию в 14:00 по тихоокеанскому времени / 17:00 по восточному времени 10 мая, чтобы обсудить эти результаты. Заинтересованные стороны могут получить доступ к вызову, набрав номер США/Канада: (833) 519-1404 или международный номер: (270) 215-9738 и введя идентификатор конференции: 2176603. Благодарим вас за интерес к TuSimple. О TuSimple TuSimple со штаб-квартирой в Сан-Диего, Калифорния, является компанией, занимающейся технологиями автономного вождения, в которой работает более 600 сотрудников в США.S. Мы работаем в Аризоне и Техасе, а также по всему миру в Европе, Японии и Китае. Компания TuSimple, основанная в 2015 году, разрабатывает готовое к коммерческому использованию решение уровня 4 (SAE) для полностью автономного вождения большегрузных грузовиков. TuSimple стремится трансформировать глобальную индустрию грузоперевозок стоимостью 4,0 триллиона долларов с помощью собственной передовой технологии автономных транспортных средств компании, которая позволяет грузовикам видеть на 1000 метров, работать почти непрерывно, используя на 10% меньше топлива, чем современные грузовики.Для получения дополнительной информации посетите сайт www.tusimple.com и следите за нами в Twitter, YouTube и LinkedIn. Заявление об отказе от ответственности Это письмо и любая сопровождающая его устная презентация содержат прогнозные заявления.
Благодарим вас за интерес к TuSimple. О TuSimple TuSimple со штаб-квартирой в Сан-Диего, Калифорния, является компанией, занимающейся технологиями автономного вождения, в которой работает более 600 сотрудников в США.S. Мы работаем в Аризоне и Техасе, а также по всему миру в Европе, Японии и Китае. Компания TuSimple, основанная в 2015 году, разрабатывает готовое к коммерческому использованию решение уровня 4 (SAE) для полностью автономного вождения большегрузных грузовиков. TuSimple стремится трансформировать глобальную индустрию грузоперевозок стоимостью 4,0 триллиона долларов с помощью собственной передовой технологии автономных транспортных средств компании, которая позволяет грузовикам видеть на 1000 метров, работать почти непрерывно, используя на 10% меньше топлива, чем современные грузовики.Для получения дополнительной информации посетите сайт www.tusimple.com и следите за нами в Twitter, YouTube и LinkedIn. Заявление об отказе от ответственности Это письмо и любая сопровождающая его устная презентация содержат прогнозные заявления. Все заявления, кроме заявлений об исторических фактах, содержащиеся в этом письме, включая заявления о будущих результатах деятельности и финансовом положении, планируемых продуктах и услугах, бизнес-стратегии и планах, целях управления будущей деятельностью TuSimple Holdings, Inc. и ее дочерних компаний. (Компания, «мы», «наш» и «нас»), размер рынка и возможности роста, конкурентное положение, а также технологические и рыночные тенденции являются прогнозными заявлениями.Прогнозные заявления по своей сути подвержены рискам и неопределенностям, некоторые из которых невозможно предсказать или определить количественно. В некоторых случаях вы можете идентифицировать прогнозные заявления с помощью таких терминов, как «ожидать», «планировать», «предвидеть», «намереваться», «цель», «проект», «прогнозировать», «потенциал», «исследовать». или «продолжить», или отрицание этих терминов или других подобных слов. Компания основывала эти прогнозные заявления в основном на своих текущих ожиданиях и предположениях, а также на информации, доступной на дату настоящего письма.
Все заявления, кроме заявлений об исторических фактах, содержащиеся в этом письме, включая заявления о будущих результатах деятельности и финансовом положении, планируемых продуктах и услугах, бизнес-стратегии и планах, целях управления будущей деятельностью TuSimple Holdings, Inc. и ее дочерних компаний. (Компания, «мы», «наш» и «нас»), размер рынка и возможности роста, конкурентное положение, а также технологические и рыночные тенденции являются прогнозными заявлениями.Прогнозные заявления по своей сути подвержены рискам и неопределенностям, некоторые из которых невозможно предсказать или определить количественно. В некоторых случаях вы можете идентифицировать прогнозные заявления с помощью таких терминов, как «ожидать», «планировать», «предвидеть», «намереваться», «цель», «проект», «прогнозировать», «потенциал», «исследовать». или «продолжить», или отрицание этих терминов или других подобных слов. Компания основывала эти прогнозные заявления в основном на своих текущих ожиданиях и предположениях, а также на информации, доступной на дату настоящего письма. Компания не берет на себя никаких обязательств по обновлению каких-либо прогнозных заявлений после даты настоящего письма, за исключением случаев, предусмотренных законом. Заявления прогнозного характера, содержащиеся в этом письме, и сопровождающая его устная презентация подвержены известным и неизвестным рискам, неопределенностям, предположениям и другим факторам, которые могут привести к тому, что фактические результаты или результаты будут существенно отличаться от любых будущих результатов или результатов, выраженных или подразумеваемых прогнозные заявления. Эти риски, неопределенности, допущения и другие факторы включают, помимо прочего, риски, связанные с тем, что автономное вождение является новой технологией, ограниченный опыт работы Компании на новом рынке, правила, регулирующие работу автономных транспортных средств, зависимость Компании от высшего руководства. команда, зависимость от сторонних поставщиков, потенциальная ответственность за качество продукции или претензии по гарантии, а также защита интеллектуальной собственности Компании.
Компания не берет на себя никаких обязательств по обновлению каких-либо прогнозных заявлений после даты настоящего письма, за исключением случаев, предусмотренных законом. Заявления прогнозного характера, содержащиеся в этом письме, и сопровождающая его устная презентация подвержены известным и неизвестным рискам, неопределенностям, предположениям и другим факторам, которые могут привести к тому, что фактические результаты или результаты будут существенно отличаться от любых будущих результатов или результатов, выраженных или подразумеваемых прогнозные заявления. Эти риски, неопределенности, допущения и другие факторы включают, помимо прочего, риски, связанные с тем, что автономное вождение является новой технологией, ограниченный опыт работы Компании на новом рынке, правила, регулирующие работу автономных транспортных средств, зависимость Компании от высшего руководства. команда, зависимость от сторонних поставщиков, потенциальная ответственность за качество продукции или претензии по гарантии, а также защита интеллектуальной собственности Компании. Кроме того, Компания работает в конкурентной и быстро меняющейся среде, и время от времени могут возникать новые риски. Вы не должны чрезмерно полагаться на какие-либо прогнозные заявления. Заявления о перспективах не следует рассматривать как гарантию будущих показателей или результатов, и они не обязательно будут точными указаниями на то время или в течение которых такие действия или результаты будут достигнуты, если вообще будут достигнуты. Компания не может предсказать все риски, а также не может оценить влияние всех факторов на свой бизнес или рынки, на которых она работает, или степень, в которой какой-либо фактор или комбинация факторов могут привести к фактическим результатам или результаты могут существенно отличаться от результатов, содержащихся в любых прогнозных заявлениях, которые Компания может сделать.Вам следует внимательно рассмотреть вышеупомянутые факторы, а также другие риски и неопределенности, описанные в разделе «Факторы риска» в нашем окончательном проспекте от 14 апреля 2021 г.
Кроме того, Компания работает в конкурентной и быстро меняющейся среде, и время от времени могут возникать новые риски. Вы не должны чрезмерно полагаться на какие-либо прогнозные заявления. Заявления о перспективах не следует рассматривать как гарантию будущих показателей или результатов, и они не обязательно будут точными указаниями на то время или в течение которых такие действия или результаты будут достигнуты, если вообще будут достигнуты. Компания не может предсказать все риски, а также не может оценить влияние всех факторов на свой бизнес или рынки, на которых она работает, или степень, в которой какой-либо фактор или комбинация факторов могут привести к фактическим результатам или результаты могут существенно отличаться от результатов, содержащихся в любых прогнозных заявлениях, которые Компания может сделать.Вам следует внимательно рассмотреть вышеупомянутые факторы, а также другие риски и неопределенности, описанные в разделе «Факторы риска» в нашем окончательном проспекте от 14 апреля 2021 г. , поданном в Комиссию по ценным бумагам и биржам («SEC») 16 апреля 2021 г., и в нашем другие документы в SEC. Эти документы SEC определяют и устраняют другие важные риски и неопределенности, которые могут привести к тому, что фактические события и результаты будут существенно отличаться от тех, которые содержатся в прогнозных заявлениях. Это письмо также содержит оценки, прогнозы и другие статистические данные, касающиеся размера и роста рынка, а также другие отраслевые данные.Эти данные содержат ряд допущений и ограничений, и вас предупреждают не придавать чрезмерного значения таким оценкам. Компания не проводила независимую проверку статистических и других отраслевых данных, сформированных независимыми сторонами и содержащихся в настоящем письме, и, соответственно, не может гарантировать их точность или полноту. Кроме того, предположения и оценки будущих результатов деятельности Компании и будущих результатов деятельности на рынках, на которых Компания конкурирует, обязательно подвержены высокой степени неопределенности и риска из-за множества факторов.
, поданном в Комиссию по ценным бумагам и биржам («SEC») 16 апреля 2021 г., и в нашем другие документы в SEC. Эти документы SEC определяют и устраняют другие важные риски и неопределенности, которые могут привести к тому, что фактические события и результаты будут существенно отличаться от тех, которые содержатся в прогнозных заявлениях. Это письмо также содержит оценки, прогнозы и другие статистические данные, касающиеся размера и роста рынка, а также другие отраслевые данные.Эти данные содержат ряд допущений и ограничений, и вас предупреждают не придавать чрезмерного значения таким оценкам. Компания не проводила независимую проверку статистических и других отраслевых данных, сформированных независимыми сторонами и содержащихся в настоящем письме, и, соответственно, не может гарантировать их точность или полноту. Кроме того, предположения и оценки будущих результатов деятельности Компании и будущих результатов деятельности на рынках, на которых Компания конкурирует, обязательно подвержены высокой степени неопределенности и риска из-за множества факторов. Эти и другие факторы могут привести к существенному отличию результатов или результатов от выраженных в оценках. Это письмо и любая сопровождающая его устная презентация также содержат оценки, прогнозы и другие статистические данные, касающиеся размера и роста рынка, а также другие отраслевые данные. Эти данные содержат ряд допущений и ограничений, и вас предупреждают не придавать чрезмерного значения таким оценкам. Компания не проводила независимую проверку статистических и других отраслевых данных, сформированных независимыми сторонами и содержащихся в настоящем письме, и, соответственно, не может гарантировать их точность или полноту.Кроме того, предположения и оценки будущих результатов деятельности Компании и будущих результатов деятельности на рынках, на которых Компания конкурирует, обязательно подвержены высокой степени неопределенности и риска из-за множества факторов. Эти и другие факторы могут привести к существенному отличию результатов или результатов от выраженных в оценках.
Эти и другие факторы могут привести к существенному отличию результатов или результатов от выраженных в оценках. Это письмо и любая сопровождающая его устная презентация также содержат оценки, прогнозы и другие статистические данные, касающиеся размера и роста рынка, а также другие отраслевые данные. Эти данные содержат ряд допущений и ограничений, и вас предупреждают не придавать чрезмерного значения таким оценкам. Компания не проводила независимую проверку статистических и других отраслевых данных, сформированных независимыми сторонами и содержащихся в настоящем письме, и, соответственно, не может гарантировать их точность или полноту.Кроме того, предположения и оценки будущих результатов деятельности Компании и будущих результатов деятельности на рынках, на которых Компания конкурирует, обязательно подвержены высокой степени неопределенности и риска из-за множества факторов. Эти и другие факторы могут привести к существенному отличию результатов или результатов от выраженных в оценках. Финансовые показатели не по GAAP TuSimple не согласовала свои ожидания в отношении расходов на исследования и разработки не по GAAP и расходов на коммерческие и административные расходы не по GAAP, потому что в настоящее время нельзя разумно рассчитать или спрогнозировать компенсационные расходы на основе акций, исключенные из таких статей.Влияние исключенной компенсации на основе акций может быть значительным. TuSimple использует эти показатели, не относящиеся к GAAP, в сочетании с показателями GAAP в рамках общей оценки своей деятельности и ликвидности, включая подготовку своего годового операционного бюджета и квартальных прогнозов, для оценки эффективности своих бизнес-стратегий и для связи со своими совет директоров относительно его финансовых показателей и ликвидности. Определения TuSimple показателей, не предусмотренных GAAP, могут отличаться от определений, используемых другими компаниями для показателей с аналогичными названиями, и поэтому сопоставимость может быть ограничена.
Финансовые показатели не по GAAP TuSimple не согласовала свои ожидания в отношении расходов на исследования и разработки не по GAAP и расходов на коммерческие и административные расходы не по GAAP, потому что в настоящее время нельзя разумно рассчитать или спрогнозировать компенсационные расходы на основе акций, исключенные из таких статей.Влияние исключенной компенсации на основе акций может быть значительным. TuSimple использует эти показатели, не относящиеся к GAAP, в сочетании с показателями GAAP в рамках общей оценки своей деятельности и ликвидности, включая подготовку своего годового операционного бюджета и квартальных прогнозов, для оценки эффективности своих бизнес-стратегий и для связи со своими совет директоров относительно его финансовых показателей и ликвидности. Определения TuSimple показателей, не предусмотренных GAAP, могут отличаться от определений, используемых другими компаниями для показателей с аналогичными названиями, и поэтому сопоставимость может быть ограничена. Кроме того, другие компании не могут публиковать эти или подобные показатели. Таким образом, показатели TuSimple, не относящиеся к GAAP, следует рассматривать в дополнение, а не как замену или отдельно от результатов компании по GAAP. TuSimple рекомендует инвесторам и другим лицам просматривать свою финансовую информацию в полном объеме, не полагаться на какие-либо отдельные финансовые показатели и рассматривать свои показатели не по GAAP в сочетании с финансовыми показателями по GAAP. Веб-трансляция телефонной конференции 15TuSimple — 14:00. PT 10 мая 2021 г. Мы проведем телеконференцию в 14:00 по тихоокеанскому времени / 17:00 по восточному времени 10 мая, чтобы обсудить эти результаты.Заинтересованные стороны могут получить доступ к вызову, набрав номер США/Канада: (833) 519-1404 или международный номер: (270) 215-9738 и введя идентификатор конференции: 2176603. Благодарим вас за интерес к TuSimple. О TuSimple TuSimple со штаб-квартирой в Сан-Диего, Калифорния, является компанией, занимающейся технологиями автономного вождения, в которой работает более 600 сотрудников в США.
Кроме того, другие компании не могут публиковать эти или подобные показатели. Таким образом, показатели TuSimple, не относящиеся к GAAP, следует рассматривать в дополнение, а не как замену или отдельно от результатов компании по GAAP. TuSimple рекомендует инвесторам и другим лицам просматривать свою финансовую информацию в полном объеме, не полагаться на какие-либо отдельные финансовые показатели и рассматривать свои показатели не по GAAP в сочетании с финансовыми показателями по GAAP. Веб-трансляция телефонной конференции 15TuSimple — 14:00. PT 10 мая 2021 г. Мы проведем телеконференцию в 14:00 по тихоокеанскому времени / 17:00 по восточному времени 10 мая, чтобы обсудить эти результаты.Заинтересованные стороны могут получить доступ к вызову, набрав номер США/Канада: (833) 519-1404 или международный номер: (270) 215-9738 и введя идентификатор конференции: 2176603. Благодарим вас за интерес к TuSimple. О TuSimple TuSimple со штаб-квартирой в Сан-Диего, Калифорния, является компанией, занимающейся технологиями автономного вождения, в которой работает более 600 сотрудников в США. У нас есть операции в Аризоне и Техасе, а также по всему миру в Европе, Японии и Китае. Компания TuSimple, основанная в 2015 году, разрабатывает готовое к коммерческому использованию решение уровня 4 (SAE) для полностью автономного вождения большегрузных грузовиков.TuSimple стремится трансформировать глобальную индустрию грузоперевозок стоимостью 4,0 триллиона долларов с помощью собственной передовой технологии автономных транспортных средств компании, которая позволяет грузовикам видеть на 1000 метров, работать почти непрерывно, используя на 10% меньше топлива, чем современные грузовики. Для получения дополнительной информации посетите сайт www.tusimple.com и следите за нами в Twitter, YouTube и LinkedIn. Заявление об отказе от ответственности Это письмо и любая сопровождающая его устная презентация содержат прогнозные заявления. Все заявления, кроме заявлений об исторических фактах, содержащиеся в этом письме, включая заявления о будущих результатах деятельности и финансовом положении, планируемых продуктах и услугах, бизнес-стратегии и планах, целях управления будущей деятельностью TuSimple Holdings, Inc.
У нас есть операции в Аризоне и Техасе, а также по всему миру в Европе, Японии и Китае. Компания TuSimple, основанная в 2015 году, разрабатывает готовое к коммерческому использованию решение уровня 4 (SAE) для полностью автономного вождения большегрузных грузовиков.TuSimple стремится трансформировать глобальную индустрию грузоперевозок стоимостью 4,0 триллиона долларов с помощью собственной передовой технологии автономных транспортных средств компании, которая позволяет грузовикам видеть на 1000 метров, работать почти непрерывно, используя на 10% меньше топлива, чем современные грузовики. Для получения дополнительной информации посетите сайт www.tusimple.com и следите за нами в Twitter, YouTube и LinkedIn. Заявление об отказе от ответственности Это письмо и любая сопровождающая его устная презентация содержат прогнозные заявления. Все заявления, кроме заявлений об исторических фактах, содержащиеся в этом письме, включая заявления о будущих результатах деятельности и финансовом положении, планируемых продуктах и услугах, бизнес-стратегии и планах, целях управления будущей деятельностью TuSimple Holdings, Inc. и ее дочерних компаний (Компания, «мы», «наш» и «нас»), размер рынка и возможности роста, конкурентное положение, а также технологические и рыночные тенденции являются прогнозными заявлениями. Прогнозные заявления по своей сути подвержены рискам и неопределенностям, некоторые из которых невозможно предсказать или определить количественно. В некоторых случаях вы можете идентифицировать прогнозные заявления с помощью таких терминов, как «ожидать», «планировать», «предвидеть», «намереваться», «цель», «проект», «прогнозировать», «потенциал», «исследовать». или «продолжить», или отрицание этих терминов или других подобных слов.Компания основывала эти прогнозные заявления в основном на своих текущих ожиданиях и предположениях, а также на информации, доступной на дату настоящего письма. Компания не берет на себя никаких обязательств по обновлению каких-либо прогнозных заявлений после даты настоящего письма, за исключением случаев, предусмотренных законом. Заявления прогнозного характера, содержащиеся в этом письме, и сопровождающая его устная презентация подвержены известным и неизвестным рискам, неопределенностям, предположениям и другим факторам, которые могут привести к тому, что фактические результаты или результаты будут существенно отличаться от любых будущих результатов или результатов, выраженных или подразумеваемых прогнозные заявления.
и ее дочерних компаний (Компания, «мы», «наш» и «нас»), размер рынка и возможности роста, конкурентное положение, а также технологические и рыночные тенденции являются прогнозными заявлениями. Прогнозные заявления по своей сути подвержены рискам и неопределенностям, некоторые из которых невозможно предсказать или определить количественно. В некоторых случаях вы можете идентифицировать прогнозные заявления с помощью таких терминов, как «ожидать», «планировать», «предвидеть», «намереваться», «цель», «проект», «прогнозировать», «потенциал», «исследовать». или «продолжить», или отрицание этих терминов или других подобных слов.Компания основывала эти прогнозные заявления в основном на своих текущих ожиданиях и предположениях, а также на информации, доступной на дату настоящего письма. Компания не берет на себя никаких обязательств по обновлению каких-либо прогнозных заявлений после даты настоящего письма, за исключением случаев, предусмотренных законом. Заявления прогнозного характера, содержащиеся в этом письме, и сопровождающая его устная презентация подвержены известным и неизвестным рискам, неопределенностям, предположениям и другим факторам, которые могут привести к тому, что фактические результаты или результаты будут существенно отличаться от любых будущих результатов или результатов, выраженных или подразумеваемых прогнозные заявления. Эти риски, неопределенности, допущения и другие факторы включают, помимо прочего, риски, связанные с тем, что автономное вождение является новой технологией, ограниченный опыт работы Компании на новом рынке, правила, регулирующие работу автономных транспортных средств, зависимость Компании от высшего руководства. команда, зависимость от сторонних поставщиков, потенциальная ответственность за качество продукции или претензии по гарантии, а также защита интеллектуальной собственности Компании. Кроме того, Компания работает в конкурентной и быстро меняющейся среде, и время от времени могут возникать новые риски.Вы не должны чрезмерно полагаться на какие-либо прогнозные заявления. Заявления о перспективах не следует рассматривать как гарантию будущих показателей или результатов, и они не обязательно будут точными указаниями на то время или в течение которых такие действия или результаты будут достигнуты, если вообще будут достигнуты. Компания не может предсказать все риски, а также не может оценить влияние всех факторов на свой бизнес или рынки, на которых она работает, или степень, в которой какой-либо фактор или комбинация факторов могут привести к фактическим результатам или результаты могут существенно отличаться от результатов, содержащихся в любых прогнозных заявлениях, которые Компания может сделать.
Эти риски, неопределенности, допущения и другие факторы включают, помимо прочего, риски, связанные с тем, что автономное вождение является новой технологией, ограниченный опыт работы Компании на новом рынке, правила, регулирующие работу автономных транспортных средств, зависимость Компании от высшего руководства. команда, зависимость от сторонних поставщиков, потенциальная ответственность за качество продукции или претензии по гарантии, а также защита интеллектуальной собственности Компании. Кроме того, Компания работает в конкурентной и быстро меняющейся среде, и время от времени могут возникать новые риски.Вы не должны чрезмерно полагаться на какие-либо прогнозные заявления. Заявления о перспективах не следует рассматривать как гарантию будущих показателей или результатов, и они не обязательно будут точными указаниями на то время или в течение которых такие действия или результаты будут достигнуты, если вообще будут достигнуты. Компания не может предсказать все риски, а также не может оценить влияние всех факторов на свой бизнес или рынки, на которых она работает, или степень, в которой какой-либо фактор или комбинация факторов могут привести к фактическим результатам или результаты могут существенно отличаться от результатов, содержащихся в любых прогнозных заявлениях, которые Компания может сделать. Вам следует внимательно рассмотреть вышеупомянутые факторы, а также другие риски и неопределенности, описанные в разделе «Факторы риска» в нашем окончательном проспекте от 14 апреля 2021 г., поданном в Комиссию по ценным бумагам и биржам («SEC») 16 апреля 2021 г., и в нашем другие документы в SEC. Эти документы SEC определяют и устраняют другие важные риски и неопределенности, которые могут привести к тому, что фактические события и результаты будут существенно отличаться от тех, которые содержатся в прогнозных заявлениях. Это письмо также содержит оценки, прогнозы и другие статистические данные, касающиеся размера и роста рынка, а также другие отраслевые данные.Эти данные содержат ряд допущений и ограничений, и вас предупреждают не придавать чрезмерного значения таким оценкам. Компания не проводила независимую проверку статистических и других отраслевых данных, сформированных независимыми сторонами и содержащихся в настоящем письме, и, соответственно, не может гарантировать их точность или полноту.
Вам следует внимательно рассмотреть вышеупомянутые факторы, а также другие риски и неопределенности, описанные в разделе «Факторы риска» в нашем окончательном проспекте от 14 апреля 2021 г., поданном в Комиссию по ценным бумагам и биржам («SEC») 16 апреля 2021 г., и в нашем другие документы в SEC. Эти документы SEC определяют и устраняют другие важные риски и неопределенности, которые могут привести к тому, что фактические события и результаты будут существенно отличаться от тех, которые содержатся в прогнозных заявлениях. Это письмо также содержит оценки, прогнозы и другие статистические данные, касающиеся размера и роста рынка, а также другие отраслевые данные.Эти данные содержат ряд допущений и ограничений, и вас предупреждают не придавать чрезмерного значения таким оценкам. Компания не проводила независимую проверку статистических и других отраслевых данных, сформированных независимыми сторонами и содержащихся в настоящем письме, и, соответственно, не может гарантировать их точность или полноту. Кроме того, предположения и оценки будущих результатов деятельности Компании и будущих результатов деятельности на рынках, на которых Компания конкурирует, обязательно подвержены высокой степени неопределенности и риска из-за множества факторов.Эти и другие факторы могут привести к существенному отличию результатов или результатов от выраженных в оценках. Это письмо и любая сопровождающая его устная презентация также содержат оценки, прогнозы и другие статистические данные, касающиеся размера и роста рынка, а также другие отраслевые данные. Эти данные содержат ряд допущений и ограничений, и вас предупреждают не придавать чрезмерного значения таким оценкам. Компания не проводила независимую проверку статистических и других отраслевых данных, сформированных независимыми сторонами и содержащихся в настоящем письме, и, соответственно, не может гарантировать их точность или полноту.Кроме того, предположения и оценки будущих результатов деятельности Компании и будущих результатов деятельности на рынках, на которых Компания конкурирует, обязательно подвержены высокой степени неопределенности и риска из-за множества факторов.
Кроме того, предположения и оценки будущих результатов деятельности Компании и будущих результатов деятельности на рынках, на которых Компания конкурирует, обязательно подвержены высокой степени неопределенности и риска из-за множества факторов.Эти и другие факторы могут привести к существенному отличию результатов или результатов от выраженных в оценках. Это письмо и любая сопровождающая его устная презентация также содержат оценки, прогнозы и другие статистические данные, касающиеся размера и роста рынка, а также другие отраслевые данные. Эти данные содержат ряд допущений и ограничений, и вас предупреждают не придавать чрезмерного значения таким оценкам. Компания не проводила независимую проверку статистических и других отраслевых данных, сформированных независимыми сторонами и содержащихся в настоящем письме, и, соответственно, не может гарантировать их точность или полноту.Кроме того, предположения и оценки будущих результатов деятельности Компании и будущих результатов деятельности на рынках, на которых Компания конкурирует, обязательно подвержены высокой степени неопределенности и риска из-за множества факторов. Эти и другие факторы могут привести к существенному отличию результатов или результатов от выраженных в оценках. Финансовые показатели не по GAAP TuSimple не согласовала свои ожидания в отношении расходов на исследования и разработки не по GAAP и расходов на коммерческие и административные расходы не по GAAP, потому что в настоящее время нельзя разумно рассчитать или спрогнозировать компенсационные расходы на основе акций, исключенные из таких статей.Влияние исключенной компенсации на основе акций может быть значительным. TuSimple использует эти показатели, не относящиеся к GAAP, в сочетании с показателями GAAP в рамках общей оценки своей деятельности и ликвидности, включая подготовку своего годового операционного бюджета и квартальных прогнозов, для оценки эффективности своих бизнес-стратегий и для связи со своими совет директоров относительно его финансовых показателей и ликвидности. Определения TuSimple показателей, не предусмотренных GAAP, могут отличаться от определений, используемых другими компаниями для показателей с аналогичными названиями, и поэтому сопоставимость может быть ограничена.
Эти и другие факторы могут привести к существенному отличию результатов или результатов от выраженных в оценках. Финансовые показатели не по GAAP TuSimple не согласовала свои ожидания в отношении расходов на исследования и разработки не по GAAP и расходов на коммерческие и административные расходы не по GAAP, потому что в настоящее время нельзя разумно рассчитать или спрогнозировать компенсационные расходы на основе акций, исключенные из таких статей.Влияние исключенной компенсации на основе акций может быть значительным. TuSimple использует эти показатели, не относящиеся к GAAP, в сочетании с показателями GAAP в рамках общей оценки своей деятельности и ликвидности, включая подготовку своего годового операционного бюджета и квартальных прогнозов, для оценки эффективности своих бизнес-стратегий и для связи со своими совет директоров относительно его финансовых показателей и ликвидности. Определения TuSimple показателей, не предусмотренных GAAP, могут отличаться от определений, используемых другими компаниями для показателей с аналогичными названиями, и поэтому сопоставимость может быть ограничена. Кроме того, другие компании не могут публиковать эти или подобные показатели. Таким образом, показатели TuSimple, не относящиеся к GAAP, следует рассматривать в дополнение, а не как замену или отдельно от результатов компании по GAAP. TuSimple рекомендует инвесторам и другим лицам просматривать свою финансовую информацию в полном объеме, не полагаться на какие-либо отдельные финансовые показатели и рассматривать свои показатели не по GAAP в сочетании с финансовыми показателями по GAAP. 15
Кроме того, другие компании не могут публиковать эти или подобные показатели. Таким образом, показатели TuSimple, не относящиеся к GAAP, следует рассматривать в дополнение, а не как замену или отдельно от результатов компании по GAAP. TuSimple рекомендует инвесторам и другим лицам просматривать свою финансовую информацию в полном объеме, не полагаться на какие-либо отдельные финансовые показатели и рассматривать свои показатели не по GAAP в сочетании с финансовыми показателями по GAAP. 15
Консолидированные балансы TuSimple TuSimple Holdings Inc.Сокращенные консолидированные балансы (в тысячах, кроме данных по акциям) (неаудированные данные) 31 декабря, 31 марта 2020 г. 2021 г. АКТИВЫ Оборотные активы: Денежные средства и их эквиваленты $ 310 815 $ 508 706 Денежные средства с ограничением использования 1 536 785 Дебиторская задолженность, нетто 1 144 1 429 Предоплаченные расходы и прочие текущие расходы Активы 2280 5640 Сумма из-за связанных сторон 3,708 3,715 Общее обоснованное активов 319,483 520 275 Собственность и оборудование, нетто 22,116 23,030 Другие активы 4,986 5,054 Общее количество активов $ 346 585 $ 548 359 Обязательства, выкупаемые кабриолеты Предпочтительные акции и дефицит акционера текущие обязательства: задолженность по уплате 4542 $ 13 779 средства связанных сторон 5 715 9 660 Начисленные расходы и прочие краткосрочные обязательства 22 961 16 826 Краткосрочная задолженность 4 623 4 670 Варварные обязательства 42 452 — Обязательства по капитальной аренде, краткосрочные 805 825 Итого краткосрочные обязательства 81 098 45 760 Долгосрочные обязательства по капитальной аренде 3 767 3 556 52 989 обязательств и непредвиденных обстоятельств (Примечание 4) Погашаемые конвертируемые привилегированные акции, 0 долл. США.номинал 0001; 138 102 770 и 138 102 770 разрешенных акций; 102 074 703 и 120 534 419 акций, выпущенных и находящихся в обращении по состоянию на 31 декабря 2020 г. и 31 марта 2021 г., 664 791 1 282 916 соответственно; совокупная ликвидационная преференция в размере 598 842 долл. США и 847 614 долл. США по состоянию на 31 декабря 2020 г. и 31 марта 2021 г. соответственно Дефицит акционеров: обыкновенные акции, номинальная стоимость 0,0001 долл. США, 361 897 230 и 361 897 230 объявленных акций; 6 6 60 543 337 и 60 603 953 акций, выпущенных и находящихся в обращении по состоянию на 31 декабря 2020 г. и 31 марта 2021 г. соответственно Добавочный капитал — 2 176 Накопленный дефицит (405 178) (790 338) Накопленный прочий совокупный доход (убыток) (301) 610 Итого дефицит акционеров (405 473) (787 546) Общие обязательства, погашаемые конвертируемые привилегированные акции и дефицит акционеров $ 346 585 $ 548 359 16TuSimple Consolidated Balances TuSimple Holdings Inc.Сокращенные консолидированные балансы (в тысячах, кроме данных по акциям) (неаудированные данные) 31 декабря, 31 марта 2020 г. 2021 г. АКТИВЫ Оборотные активы: Денежные средства и их эквиваленты $ 310 815 $ 508 706 Денежные средства с ограничением использования 1 536 785 Дебиторская задолженность, нетто 1 144 1 429 Предоплаченные расходы и прочие текущие расходы Активы 2280 5640 Сумма из-за связанных сторон 3,708 3,715 Общее обоснованное активов 319,483 520 275 Собственность и оборудование, нетто 22,116 23,030 Другие активы 4,986 5,054 Общее количество активов $ 346 585 $ 548 359 Обязательства, выкупаемые кабриолеты Предпочтительные акции и дефицит акционера текущие обязательства: задолженность по уплате 4542 $ 13 779 средства связанных сторон 5 715 9 660 Начисленные расходы и прочие краткосрочные обязательства 22 961 16 826 Краткосрочная задолженность 4 623 4 670 Варварные обязательства 42 452 — Обязательства по капитальной аренде, краткосрочные 805 825 Итого краткосрочные обязательства 81 098 45 760 Долгосрочные обязательства по капитальной аренде 3 767 3 556 52 989 обязательств и непредвиденных обстоятельств (Примечание 4) Погашаемые конвертируемые привилегированные акции, 0 долл.
США.номинал 0001; 138 102 770 и 138 102 770 разрешенных акций; 102 074 703 и 120 534 419 акций, выпущенных и находящихся в обращении по состоянию на 31 декабря 2020 г. и 31 марта 2021 г., 664 791 1 282 916 соответственно; совокупная ликвидационная преференция в размере 598 842 долл. США и 847 614 долл. США по состоянию на 31 декабря 2020 г. и 31 марта 2021 г. соответственно Дефицит акционеров: обыкновенные акции, номинальная стоимость 0,0001 долл. США, 361 897 230 и 361 897 230 объявленных акций; 6 6 60 543 337 и 60 603 953 акций, выпущенных и находящихся в обращении по состоянию на 31 декабря 2020 г. и 31 марта 2021 г. соответственно Добавочный капитал — 2 176 Накопленный дефицит (405 178) (790 338) Накопленный прочий совокупный доход (убыток) (301) 610 Итого дефицит акционеров (405 473) (787 546) Общие обязательства, погашаемые конвертируемые привилегированные акции и дефицит акционеров $ 346 585 $ 548 359 16TuSimple Consolidated Balances TuSimple Holdings Inc.Сокращенные консолидированные балансы (в тысячах, кроме данных по акциям) (неаудированные данные) 31 декабря, 31 марта 2020 г. 2021 г. АКТИВЫ Оборотные активы: Денежные средства и их эквиваленты $ 310 815 $ 508 706 Денежные средства с ограничением использования 1 536 785 Дебиторская задолженность, нетто 1 144 1 429 Предоплаченные расходы и прочие текущие расходы Активы 2280 5640 Сумма из-за связанных сторон 3,708 3,715 Общее обоснованное активов 319,483 520 275 Собственность и оборудование, нетто 22,116 23,030 Другие активы 4,986 5,054 Общее количество активов $ 346 585 $ 548 359 Обязательства, выкупаемые кабриолеты Предпочтительные акции и дефицит акционера текущие обязательства: задолженность по уплате 4542 $ 13 779 средства связанных сторон 5 715 9 660 Начисленные расходы и прочие краткосрочные обязательства 22 961 16 826 Краткосрочная задолженность 4 623 4 670 Варварные обязательства 42 452 — Обязательства по капитальной аренде, краткосрочные 805 825 Итого краткосрочные обязательства 81 098 45 760 Долгосрочные обязательства по капитальной аренде 3 767 3 556 52 989 обязательств и непредвиденных обстоятельств (Примечание 4) Погашаемые конвертируемые привилегированные акции, 0 долл. США.номинал 0001; 138 102 770 и 138 102 770 разрешенных акций; 102 074 703 и 120 534 419 акций, выпущенных и находящихся в обращении по состоянию на 31 декабря 2020 г. и 31 марта 2021 г., 664 791 1 282 916 соответственно; совокупная ликвидационная преференция в размере 598 842 долл. США и 847 614 долл. США по состоянию на 31 декабря 2020 г. и 31 марта 2021 г. соответственно Дефицит акционеров: обыкновенные акции, номинальная стоимость 0,0001 долл. США, 361 897 230 и 361 897 230 объявленных акций; 6 6 60 543 337 и 60 603 953 акций, выпущенных и находящихся в обращении по состоянию на 31 декабря 2020 г. и 31 марта 2021 г. соответственно Добавочный капитал — 2 176 Накопленный дефицит (405 178) (790 338) Накопленный прочий совокупный доход (убыток) (301) 610 Итого дефицит акционеров (405 473) (787 546) Итого обязательства, погашаемые конвертируемые привилегированные акции и дефицит акционеров $ 346 585 $ 548 359 16
США.номинал 0001; 138 102 770 и 138 102 770 разрешенных акций; 102 074 703 и 120 534 419 акций, выпущенных и находящихся в обращении по состоянию на 31 декабря 2020 г. и 31 марта 2021 г., 664 791 1 282 916 соответственно; совокупная ликвидационная преференция в размере 598 842 долл. США и 847 614 долл. США по состоянию на 31 декабря 2020 г. и 31 марта 2021 г. соответственно Дефицит акционеров: обыкновенные акции, номинальная стоимость 0,0001 долл. США, 361 897 230 и 361 897 230 объявленных акций; 6 6 60 543 337 и 60 603 953 акций, выпущенных и находящихся в обращении по состоянию на 31 декабря 2020 г. и 31 марта 2021 г. соответственно Добавочный капитал — 2 176 Накопленный дефицит (405 178) (790 338) Накопленный прочий совокупный доход (убыток) (301) 610 Итого дефицит акционеров (405 473) (787 546) Итого обязательства, погашаемые конвертируемые привилегированные акции и дефицит акционеров $ 346 585 $ 548 359 16
TuSimple Консолидированные отчеты о прибылях и убытках TuSimple Holdings Inc. Сокращенные консолидированные отчеты о прибылях и убытках (в тысячах, кроме данных по акциям и по акциям) За три месяца, закончившихся (неаудированные) 31 марта 2020 г. 2021 г. Выручка $ 259 $ 944 Затраты и расходы: Себестоимость выручки 771 2 246 Исследования и разработки 18 182 41 434 Продажи и маркетинг 437 678 Общие и административные расходы 6 726 15 224 Итого затраты и расходы 26 116 59 582 Убыток от операционной деятельности (25 857) (58 638) Изменение справедливой стоимости гарантийных обязательств — (326 900) Прочие доходы, нетто 96 378 Убыток до создания резерва по налогу на прибыль (25 761) (385 160) Резерв по налогу на прибыль — — Чистый убыток (25 761) (385 160) Увеличение погашаемых конвертируемых привилегированных акций — (4 135) Чистый убыток, приходящийся на владельцев обыкновенных акций (25 761) (389 295) Чистый убыток на акцию, приходящийся на владельцев обыкновенных акций, базовый и разводненный $ ( 0.45) $ (6,43) Средневзвешенные акции, использованные при расчете чистого убытка на акцию, приходящегося на 56 679 887 60 576 886 держателям обыкновенных акций, базовые и разводненные 17TuSimple Консолидированные отчеты о прибылях и убытках TuSimple Holdings Inc.
Сокращенные консолидированные отчеты о прибылях и убытках (в тысячах, кроме данных по акциям и по акциям) За три месяца, закончившихся (неаудированные) 31 марта 2020 г. 2021 г. Выручка $ 259 $ 944 Затраты и расходы: Себестоимость выручки 771 2 246 Исследования и разработки 18 182 41 434 Продажи и маркетинг 437 678 Общие и административные расходы 6 726 15 224 Итого затраты и расходы 26 116 59 582 Убыток от операционной деятельности (25 857) (58 638) Изменение справедливой стоимости гарантийных обязательств — (326 900) Прочие доходы, нетто 96 378 Убыток до создания резерва по налогу на прибыль (25 761) (385 160) Резерв по налогу на прибыль — — Чистый убыток (25 761) (385 160) Увеличение погашаемых конвертируемых привилегированных акций — (4 135) Чистый убыток, приходящийся на владельцев обыкновенных акций (25 761) (389 295) Чистый убыток на акцию, приходящийся на владельцев обыкновенных акций, базовый и разводненный $ ( 0.45) $ (6,43) Средневзвешенные акции, использованные при расчете чистого убытка на акцию, приходящегося на 56 679 887 60 576 886 держателям обыкновенных акций, базовые и разводненные 17TuSimple Консолидированные отчеты о прибылях и убытках TuSimple Holdings Inc. данные) За три месяца, закончившихся (неаудировано) 31 марта 2020 г. 2021 г. Выручка $ 259 $ 944 Затраты и расходы: Себестоимость выручки 771 2 246 Исследования и разработки 18 182 41 434 Продажи и маркетинг 437 678 Общие и административные 6 726 15 224 Общие затраты и расходы 26 116 59 582 Убытки от операций (25 857) (58 638) Изменение справедливой стоимости обязательств по варрантам — (326 900) Прочий доход, нетто 96 378 Убыток до резерва по налогу на прибыль (25 761) (385 160) Резерв по налогу на прибыль — — Чистый убыток (25 761) (385 160) Увеличение погашаемых конвертируемых привилегированных акций — (4 135) Чистый убыток, приходящийся на владельцев обыкновенных акций (25 761) (389 295) Чистый убыток на акцию, приходящийся на владельцев обыкновенных акций, базовый и разбавленный $ (0.45) $ (6,43) Средневзвешенные акции, использованные при расчете чистого убытка на акцию, приходящегося на 56 679 887 60 576 886 держателям обыкновенных акций, базовые и разводненные 17
данные) За три месяца, закончившихся (неаудировано) 31 марта 2020 г. 2021 г. Выручка $ 259 $ 944 Затраты и расходы: Себестоимость выручки 771 2 246 Исследования и разработки 18 182 41 434 Продажи и маркетинг 437 678 Общие и административные 6 726 15 224 Общие затраты и расходы 26 116 59 582 Убытки от операций (25 857) (58 638) Изменение справедливой стоимости обязательств по варрантам — (326 900) Прочий доход, нетто 96 378 Убыток до резерва по налогу на прибыль (25 761) (385 160) Резерв по налогу на прибыль — — Чистый убыток (25 761) (385 160) Увеличение погашаемых конвертируемых привилегированных акций — (4 135) Чистый убыток, приходящийся на владельцев обыкновенных акций (25 761) (389 295) Чистый убыток на акцию, приходящийся на владельцев обыкновенных акций, базовый и разбавленный $ (0.45) $ (6,43) Средневзвешенные акции, использованные при расчете чистого убытка на акцию, приходящегося на 56 679 887 60 576 886 держателям обыкновенных акций, базовые и разводненные 17
TuSimple Консолидированные отчеты о движении денежных средств TuSimple Holdings Inc. Месяцы, закончившиеся (в тысячах) 31 марта (неаудировано) 2020 2021 Движение денежных средств от операционной деятельности: Чистый убыток $ (25 761) $ (385 160) Корректировки для сверки чистого убытка с чистыми денежными средствами, использованными в операционной деятельности: Компенсация на основе акций 1 227 6 289 Амортизация и амортизация 1 825 2 110 Изменение справедливой стоимости гарантийных обязательств — 326 900 Изменения в операционных активах и обязательствах: Дебиторская задолженность (17) (285) Расходы будущих периодов и прочие оборотные активы 1 055 (3 360 Прочие активы (120) (152) Кредиторская задолженность 1 143 9 237 Суммы средства связанных сторон (386) 4 558 Начисленные расходы и прочие краткосрочные обязательства (2 262) (8 217) Прочие обязательства 932 1 347 Чистые денежные средства, использованные в операционной деятельности (22 364) (46 733) Денежные потоки от инвестиционной деятельности: Приобретение основных средств (1 120) (1 210) Приобретение нематериальных активов (62) (87) Поступления от продажи основных средств — 100 Чистые денежные средства, использованные в инвестиционной деятельности (1 182) (1 197) Денежные потоки от финансовой деятельности: Поступления от выпуска погашаемых конвертируемых привилегированных акций — 61 631 Поступления от исполнения варрантов на погашаемые конвертируемые привилегированные акции — 183 007 613) Основные платежи по обязательствам по капитальной аренде — (191) Основные платежи по прочим обязательствам (171) (117) Чистые денежные средства, полученные (использованные) в финансовой деятельности (171) 243 970 Влияние изменений обменного курса на денежные средства, их эквиваленты и ограниченные денежные средства (42) 1 100 Чистое увеличение (уменьшение) денежных средств, их эквивалентов и денежных средств с ограничением использования (23 759) 197 140 64 110 312 351 Денежные средства, их эквиваленты и денежные средства с ограничением использования — начало периода d Денежные средства, их эквиваленты и денежные средства с ограничением использования – на конец периода 40 351 долл.
Месяцы, закончившиеся (в тысячах) 31 марта (неаудировано) 2020 2021 Движение денежных средств от операционной деятельности: Чистый убыток $ (25 761) $ (385 160) Корректировки для сверки чистого убытка с чистыми денежными средствами, использованными в операционной деятельности: Компенсация на основе акций 1 227 6 289 Амортизация и амортизация 1 825 2 110 Изменение справедливой стоимости гарантийных обязательств — 326 900 Изменения в операционных активах и обязательствах: Дебиторская задолженность (17) (285) Расходы будущих периодов и прочие оборотные активы 1 055 (3 360 Прочие активы (120) (152) Кредиторская задолженность 1 143 9 237 Суммы средства связанных сторон (386) 4 558 Начисленные расходы и прочие краткосрочные обязательства (2 262) (8 217) Прочие обязательства 932 1 347 Чистые денежные средства, использованные в операционной деятельности (22 364) (46 733) Денежные потоки от инвестиционной деятельности: Приобретение основных средств (1 120) (1 210) Приобретение нематериальных активов (62) (87) Поступления от продажи основных средств — 100 Чистые денежные средства, использованные в инвестиционной деятельности (1 182) (1 197) Денежные потоки от финансовой деятельности: Поступления от выпуска погашаемых конвертируемых привилегированных акций — 61 631 Поступления от исполнения варрантов на погашаемые конвертируемые привилегированные акции — 183 007 613) Основные платежи по обязательствам по капитальной аренде — (191) Основные платежи по прочим обязательствам (171) (117) Чистые денежные средства, полученные (использованные) в финансовой деятельности (171) 243 970 Влияние изменений обменного курса на денежные средства, их эквиваленты и ограниченные денежные средства (42) 1 100 Чистое увеличение (уменьшение) денежных средств, их эквивалентов и денежных средств с ограничением использования (23 759) 197 140 64 110 312 351 Денежные средства, их эквиваленты и денежные средства с ограничением использования — начало периода d Денежные средства, их эквиваленты и денежные средства с ограничением использования – на конец периода 40 351 долл. США 509 491 долл. США Дополнительное раскрытие информации о движении денежных средств: Денежные средства, уплаченные в счет процентов 173 долл. США 195 долл. США Дополнительный перечень неденежной инвестиционной и финансовой деятельности: Приобретение основных средств, включенных в пассивы $ 686 $ 1 939 Увеличение погашаемых конвертируемых привилегированных акций — $ 4 135 Передача досрочно исполненных опционов на акции — $ 21 Исполнение варрантов с классификацией ответственности — $ 369 352 Безналичное исполнение опционов на обыкновенные акции $ 975 — 18TuSimple Консолидированные отчеты о движении денежных средств TuSimple Холдингс Инк.Сокращенные консолидированные отчеты о движении денежных средств за три месяца, закончившихся (в тысячах) 31 марта (неаудированные данные) 2020 г. 2021 г. Движение денежных средств от операционной деятельности: Чистый убыток $ (25 761) $ (385 160) Корректировки для сверки чистого убытка с чистыми денежными средствами, использованными в операционной деятельности: Вознаграждение акциями 1 227 6 289 Износ и амортизация 1 825 2 110 Изменение справедливой стоимости гарантийных обязательств — 326 900 Изменения в операционных активах и обязательствах: Дебиторская задолженность (17) (285) Расходы будущих периодов и прочие оборотные активы 1 055 (3 360 Прочие активы (120) ( 152) Кредиторская задолженность 1 143 9 237 Средства перед связанными сторонами (386) 4 558 Начисленные расходы и прочие краткосрочные обязательства (2 262) (8 217) Прочие обязательства 932 1 347 Чистые денежные средства, использованные в операционной деятельности (22 364) (46 733) Денежные потоки от инвестиционной деятельности : Приобретение основных средств (1 120) (1 210) Приобретение нематериальных активов (62) (87) Поступления от продажи основных средств — 100 Чистые денежные средства, использованные в инвестиционной деятельности (1,1 82) (1 197) Денежные потоки от финансовой деятельности: Поступления от выпуска погашаемых конвертируемых привилегированных акций — 61 631 Поступления от исполнения варрантов на погашаемые конвертируемые привилегированные акции — 183 007 Поступления от исполнения опционов на акции — 253 ) Основные платежи по обязательствам по капитальной аренде — (191) Основные платежи по прочим обязательствам (171) (117) Чистые денежные средства, полученные (использованные) в финансовой деятельности (171) 243 970 Влияние изменений обменного курса на денежные средства, их эквиваленты и денежные средства, ограниченные в использовании (42) 1 100 Чистое увеличение (уменьшение) денежных средств, их эквивалентов и денежных средств с ограничением использования (23 759) 197 140 64 110 312 351 Денежные средства, их эквиваленты и денежные средства с ограничением использования — начало периода Денежные средства, их эквиваленты и денежные средства с ограничением использования — конец периода $ 40 351 509 491 долл.
США 509 491 долл. США Дополнительное раскрытие информации о движении денежных средств: Денежные средства, уплаченные в счет процентов 173 долл. США 195 долл. США Дополнительный перечень неденежной инвестиционной и финансовой деятельности: Приобретение основных средств, включенных в пассивы $ 686 $ 1 939 Увеличение погашаемых конвертируемых привилегированных акций — $ 4 135 Передача досрочно исполненных опционов на акции — $ 21 Исполнение варрантов с классификацией ответственности — $ 369 352 Безналичное исполнение опционов на обыкновенные акции $ 975 — 18TuSimple Консолидированные отчеты о движении денежных средств TuSimple Холдингс Инк.Сокращенные консолидированные отчеты о движении денежных средств за три месяца, закончившихся (в тысячах) 31 марта (неаудированные данные) 2020 г. 2021 г. Движение денежных средств от операционной деятельности: Чистый убыток $ (25 761) $ (385 160) Корректировки для сверки чистого убытка с чистыми денежными средствами, использованными в операционной деятельности: Вознаграждение акциями 1 227 6 289 Износ и амортизация 1 825 2 110 Изменение справедливой стоимости гарантийных обязательств — 326 900 Изменения в операционных активах и обязательствах: Дебиторская задолженность (17) (285) Расходы будущих периодов и прочие оборотные активы 1 055 (3 360 Прочие активы (120) ( 152) Кредиторская задолженность 1 143 9 237 Средства перед связанными сторонами (386) 4 558 Начисленные расходы и прочие краткосрочные обязательства (2 262) (8 217) Прочие обязательства 932 1 347 Чистые денежные средства, использованные в операционной деятельности (22 364) (46 733) Денежные потоки от инвестиционной деятельности : Приобретение основных средств (1 120) (1 210) Приобретение нематериальных активов (62) (87) Поступления от продажи основных средств — 100 Чистые денежные средства, использованные в инвестиционной деятельности (1,1 82) (1 197) Денежные потоки от финансовой деятельности: Поступления от выпуска погашаемых конвертируемых привилегированных акций — 61 631 Поступления от исполнения варрантов на погашаемые конвертируемые привилегированные акции — 183 007 Поступления от исполнения опционов на акции — 253 ) Основные платежи по обязательствам по капитальной аренде — (191) Основные платежи по прочим обязательствам (171) (117) Чистые денежные средства, полученные (использованные) в финансовой деятельности (171) 243 970 Влияние изменений обменного курса на денежные средства, их эквиваленты и денежные средства, ограниченные в использовании (42) 1 100 Чистое увеличение (уменьшение) денежных средств, их эквивалентов и денежных средств с ограничением использования (23 759) 197 140 64 110 312 351 Денежные средства, их эквиваленты и денежные средства с ограничением использования — начало периода Денежные средства, их эквиваленты и денежные средства с ограничением использования — конец периода $ 40 351 509 491 долл. США Дополнительное раскрытие информации о движении денежных средств: Денежные средства, выплаченные в счет процентов 173 долл. США 195 долл. США Дополнительный перечень неденежных инвестиций и финансовой деятельности: Приобретение имущества a оборудование, включенное в обязательства 686 долл. США 1 939 долл. США Увеличение погашаемых конвертируемых привилегированных акций — 4 135 долл. США Передача прав на досрочно исполненные опционы на акции — 21 долл. США Исполнение варрантов с классификацией ответственности — 369 352 долл. США Безналичное исполнение опционов на обыкновенные акции $ 975 — 18
США Дополнительное раскрытие информации о движении денежных средств: Денежные средства, выплаченные в счет процентов 173 долл. США 195 долл. США Дополнительный перечень неденежных инвестиций и финансовой деятельности: Приобретение имущества a оборудование, включенное в обязательства 686 долл. США 1 939 долл. США Увеличение погашаемых конвертируемых привилегированных акций — 4 135 долл. США Передача прав на досрочно исполненные опционы на акции — 21 долл. США Исполнение варрантов с классификацией ответственности — 369 352 долл. США Безналичное исполнение опционов на обыкновенные акции $ 975 — 18
TuSimple Подсчет акций Сверка TuSimple Holdings Inc.Сверка количества акций Количество акций Обыкновенные акции, находящиеся в обращении на 31 марта 2021 г. 60 603 953 Обыкновенные акции классов A и B Обыкновенные акции класса A, выпущенные в ходе IPO 27 027 027 Обыкновенные акции класса A, выпущенные в ходе одновременного частного размещения 874 999 Преобразование привилегированных акций в класс 1:1 Обыкновенные акции после IPO 120 534 419 Обыкновенные акции класса А, которые будут выпущены после погашения RSU и SVA, получивших право собственности 3 426 096 Проформа Обыкновенные акции классов A и B после IPO 212 466 494 Разводняющие ценные бумаги, не включенные в указанное выше количество акций Выпущенные опционы 15 311 313 RSU и SVA без права собственности 1 324 390 Полностью Разведенные Проформа Обыкновенные акции классов A и B после IPO 229 102 197 19TuSimple Количество акций Сверка TuSimple Holdings Inc. Сверка количества акций Количество акций Обыкновенные акции, находящиеся в обращении на 31 марта 2021 г. 60 603 953 Обыкновенные акции классов A и B Обыкновенные акции класса A, выпущенные в ходе IPO 27 027 027 Обыкновенные акции класса A, выпущенные в ходе одновременного частного размещения 874 999 Преобразование привилегированных акций в класс 1:1 Обыкновенные акции после IPO 120 534 419 Обыкновенные акции класса А, которые будут выпущены после погашения RSU и SVA, получивших право собственности 3 426 096 Проформа Обыкновенные акции классов A и B после IPO 212 466 494 Разводняющие ценные бумаги, не включенные в указанное выше количество акций Выпущенные опционы 15 311 313 RSU и SVA без права собственности 1 324 390 Полностью Разводненные обыкновенные акции классов A и B после IPO 229 102 197 19
Сверка количества акций Количество акций Обыкновенные акции, находящиеся в обращении на 31 марта 2021 г. 60 603 953 Обыкновенные акции классов A и B Обыкновенные акции класса A, выпущенные в ходе IPO 27 027 027 Обыкновенные акции класса A, выпущенные в ходе одновременного частного размещения 874 999 Преобразование привилегированных акций в класс 1:1 Обыкновенные акции после IPO 120 534 419 Обыкновенные акции класса А, которые будут выпущены после погашения RSU и SVA, получивших право собственности 3 426 096 Проформа Обыкновенные акции классов A и B после IPO 212 466 494 Разводняющие ценные бумаги, не включенные в указанное выше количество акций Выпущенные опционы 15 311 313 RSU и SVA без права собственности 1 324 390 Полностью Разводненные обыкновенные акции классов A и B после IPO 229 102 197 19
TUSIMPLE ПО ЦИФРАМ (1) (1) (1) 950+ $1.8 млрд+ 275+ 70 сотрудников Совокупное количество автономных основных технологий в 3 подразделениях по финансированию патентов на глобальном континенте с датой, начиная с IPO ~84% и частной рабочей силы Привлечение капитала, предназначенного для НИОКР (1) (1) (2) ~3,7 млн ~ 5000 ~ 2 млн долл. США 6 775 дорожных миль Сопоставленная выручка в 2020 году Целевое строительство, маршруты L4 Резервирование автономных грузовиков с выездом водителя 20 (1) По состоянию на март 0,2021 г. (2) По состоянию на май 2021 г. TUSIMPLE В ЦИФРАХ (1) (1) (1) ) 950+ 1,8 млрд долларов США+ 275+ 70 сотрудников Совокупное количество автономных основных технологий на трех континентах по всему миру, начиная с IPO ~84% и Частная рабочая сила Привлечение капитала, предназначенного для НИОКР (1) (1) (2) ~ 3.7 млн ~ 5 000 ~ $2 млн 6 775 дорожных миль Составленные мили Выручка за 2020 г. Целевое строительство, маршруты L4 Резервирование автономных грузовиков с выездом водителя 20 (1) По состоянию на март 0,2021 г. (2) По состоянию на май 2021 г.
США 6 775 дорожных миль Сопоставленная выручка в 2020 году Целевое строительство, маршруты L4 Резервирование автономных грузовиков с выездом водителя 20 (1) По состоянию на март 0,2021 г. (2) По состоянию на май 2021 г. TUSIMPLE В ЦИФРАХ (1) (1) (1) ) 950+ 1,8 млрд долларов США+ 275+ 70 сотрудников Совокупное количество автономных основных технологий на трех континентах по всему миру, начиная с IPO ~84% и Частная рабочая сила Привлечение капитала, предназначенного для НИОКР (1) (1) (2) ~ 3.7 млн ~ 5 000 ~ $2 млн 6 775 дорожных миль Составленные мили Выручка за 2020 г. Целевое строительство, маршруты L4 Резервирование автономных грузовиков с выездом водителя 20 (1) По состоянию на март 0,2021 г. (2) По состоянию на май 2021 г.
Докторант в Автономные транспортные системы
Королевский технологический институт KTH в Стокгольме стал одним из ведущих технических и инженерных университетов Европы, а также ключевым центром интеллектуальных талантов и инноваций. Мы являемся крупнейшим в Швеции техническим научно-исследовательским и учебным учреждением, в котором учатся студенты, исследователи и преподаватели со всего мира.Наши исследования и образование охватывают широкую область, включая естественные науки и все отрасли техники, а также архитектуру, управление промышленностью, городское планирование, историю и философию.
Мы являемся крупнейшим в Швеции техническим научно-исследовательским и учебным учреждением, в котором учатся студенты, исследователи и преподаватели со всего мира.Наши исследования и образование охватывают широкую область, включая естественные науки и все отрасли техники, а также архитектуру, управление промышленностью, городское планирование, историю и философию.
Отдел проектирования машин активно занимается исследованиями и обучением в рамках реализации продукции. Конкретными областями являются: элементы машин, проектирование машин, мехатроника и встроенные системы управления, двигатели внутреннего сгорания, комплексная разработка продуктов, инновации и промышленный дизайн.
Описание проекта
Предмет третьего цикла: Дизайн машин
Подразделение мехатроники и встроенных систем ищет докторанта, специализирующегося на автономных транспортных системах.Вы будете частью группы других докторантов и старших научных сотрудников и будете сотрудничать с ней. Вы также будете работать в тесном сотрудничестве со Scania.
Вы также будете работать в тесном сотрудничестве со Scania.
Автономные транспортные системы — это смена парадигмы в индустрии тяжелых грузовиков. Вместо того, чтобы предоставлять только грузовики, эта новая идея состоит в том, чтобы предоставлять целые системы грузовиков. Кроме того, грузовики должны эксплуатироваться автономно без водителя в закрытых помещениях, например, в шахты или на дорогах общего пользования. Поскольку транспортные средства не имеют водителя, а базовая технология основана на искусственном интеллекте и машинном обучении, гарантировать безопасную работу будет очень сложно; потребуются совершенно новые технологии и методы.
Целью этого исследовательского проекта является разработка теорий и методов для разработки безопасных автономных транспортных систем. Ожидается, что результаты исследований приведут как к публикации результатов высокого научного качества, так и к промышленному применению. Задачи исследования включают разработку теории и методов, моделирование, симуляцию, разработку инструментов-прототипов и проверку на соответствие реальным промышленным системам.
Проект предлагает уникальную возможность работать с промышленно мотивированными исследованиями, когда цели исследований координируются с возникающими потребностями в отрасли.Вы проведете часть времени в Scania, чтобы сотрудничать с инженерами Scania и проводить тематические исследования на реальных промышленных примерах.
Проект финансируется Шведским агентством инноваций Vinnova и Scania.
Что мы предлагаем
Право на участие
Чтобы быть принятым в аспирантуру (глава 7, 39 § Шведского указа о высшем образовании), заявитель должен иметь базовое право в соответствии с одним из следующих:
- прошел обучение на продвинутом уровне,
- пройденных курсов требуют не менее 240 кредитов высшего образования, из которых не менее 60 кредитов высшего образования на продвинутом уровне, или
- любым другим способом, приобретенным внутри страны или за ее пределами, приобрел по существу эквивалентные знания.

Подходящим образованием является степень магистра в области теории управления, электротехники, инженерной физики, математики, компьютерных технологий или компьютерных наук.
Выбор
Чтобы преуспеть в докторантуре KTH, вам необходимо быть целеустремленным и настойчивым в своей работе. При отборе претендентов будут оцениваться:
- способность самостоятельно выполнять свою работу,
- способность сотрудничать с другими,
- иметь профессиональный подход и
- анализировать и работать со сложными вопросами.
Целевая степень: Докторская степень
Информация о поступлении и трудоустройстве
В качестве докторантов могут работать только те, кто уже поступил или был допущен к обучению третьего цикла. Срок первоначального контракта не может превышать одного года и впоследствии может быть продлен. Докторанты могут заниматься преподаванием, исследованиями и администрированием, что соответствует максимум 20% штатной должности.
Представители профсоюза
Вы найдете контактную информацию представителей профсоюза на веб-сайте KTH.
Секция докторантуры (Студенческий союз KTH Royal Institute of Technology)
Контактную информацию секции докторантуры вы найдете на сайте секции.
Применение
Подайте заявку на вакансию и зачисление через систему найма KTH. Заявитель обязан убедиться, что заявка заполнена в соответствии с инструкциями в объявлении.
Заявки должны быть получены в последний день закрытия в полночь, CET/CEST (центральноевропейское время/центральноевропейское летнее время).
Приложения должны включать следующие элементы:
- CV, включая ваш соответствующий профессиональный опыт и знания.
- Письмо-заявка с кратким описанием того, почему вы хотите заниматься исследованиями, каковы ваши академические интересы и как они связаны с вашим предыдущим обучением и будущими целями. (максимум 2 страницы)
- Копия сертификата (сертификатов) об образовании и стенограммы записей из ранее посещаемых учебных заведений университетского уровня.Переводы на английский или шведский язык, если оригиналы документов не изданы на одном из этих языков.
- Репрезентативные публикации или технические отчеты. Для более длинных документов предоставьте резюме (аннотацию) и веб-ссылку на полный текст.
 (максимум 2 страницы)
(максимум 2 страницы)Другая информация
Гендерное равенство, многообразие и нулевая терпимость к дискриминации и домогательствам являются важными аспектами работы KTH с качеством, а также основными ценностями нашей организации.
Подробнее об обработке персональных данных при приеме на работу читайте здесь.
Мы категорически отказываемся от любых контактов с кадровыми и рекрутинговыми агентствами и продавцами объявлений о вакансиях.
Отказ от ответственности: В случае несоответствия между шведским оригиналом и английским переводом объявления о вакансии шведская версия имеет приоритет.
Тип занятости: Временная должность на срок более 6 месяцев
Тип контракта: Полный рабочий день
Первый день работы: Согласно договору
Заработная плата: Месячная заработная плата в соответствии с соглашением о заработной плате докторанта КТН
Позиции: 1
1
Рабочее время: 100%
100%
Город: Стокгольм
County: Stockholms Län
Страна: Швеция
Номер ссылки: M-2019-0306
Контакт:
- Маттиас Нюберг, адъюнкт-профессор, matny@kth.се
- Майя Оберг, сотрудник отдела кадров (только вопросы управления персоналом), +46 8 790 76 53
Опубликовано: 21.02.2019
Дата последней заявки: 21.03.2019
Hitachi – европейские исследования и разработки
Передовые технологии прототипов от Европейского центра социальных инноваций Hitachi лежат в основе Autonet2030, совместного проекта ЕС по автономному вождению.

Партнеры: Scania, Fiat, Baselabs, Broadbit и 4 европейских научно-исследовательских института
Для успеха автоматизированные транспортные средства должны быть подключены к сетиАвтономное вождение обещает сделать поездки более безопасными и энергоэффективными.На сегодняшний день большая часть его разработок сосредоточена на отдельных приложениях, таких как автономные транспортные средства на основе датчиков. Но чтобы раскрыть свой истинный потенциал, автономное вождение должно быть совместным. Примером этого является взвод, когда подключенные транспортные средства движутся близко друг к другу, экономя топливо. Когда как высокоавтоматизированные, так и управляемые вручную транспортные средства смогут общаться друг с другом, они смогут координировать свои движения, что значительно повысит безопасность, комфорт и эффективность движения.
Совместное решение Чтобы стимулировать развитие в этой области, Европейский Союз инвестировал средства в исследование совместной мобильности в рамках своей программы финансирования Framework 7. Благодаря нашей успешной коммуникационной платформе промежуточного программного обеспечения C2X (от автомобиля к чему угодно) и нашим передовым исследованиям в области автономного вождения на основе данных Европейский центр социальных инноваций был приглашен стать частью консорциума, который работал над созданием «Кооперативных систем в Поддержка сетевого автоматизированного вождения к 2030 году».
Благодаря нашей успешной коммуникационной платформе промежуточного программного обеспечения C2X (от автомобиля к чему угодно) и нашим передовым исследованиям в области автономного вождения на основе данных Европейский центр социальных инноваций был приглашен стать частью консорциума, который работал над созданием «Кооперативных систем в Поддержка сетевого автоматизированного вождения к 2030 году».
Наши технологии были основополагающими для этого проекта под названием Autonet2030 и необходимы для достижения его цели — демонстрации «совместного автономного вождения».Относительно небольшой консорциум означал, что партнеры могли быстро и легко сотрудничать друг с другом, и Hitachi тесно сотрудничала со Scania и Fiat для интеграции нашей технологии.
Помимо предоставления промежуточного программного обеспечения C2X и нашего демонстрационного автомобиля VW Passat, мы также внесли свой вклад в «совместную автономную платформу» Autonet2030, разработав бортовую систему, которая собирает и анализирует данные датчиков, а также бортовую «локальную динамическую карту», которая предоставляет статические и переменная информация об окружающей среде в режиме реального времени.
Scania и Fiat использовали эти технологии Hitachi, и вместе с этими производителями мы также совместно разработали технологию для управления транспортными средствами и для таких приложений, как совместное маневрирование и взвод.
Сосуществование автономных и механических транспортных средств Путь к универсальным автономным транспортным средствам, вероятно, будет долгим, и автомобили с ручным управлением должны будут иметь возможность сосуществовать с автоматизированными транспортными средствами в течение многих лет. Autonet2030 продемонстрировал, как может работать такое сосуществование.В то время как демонстрационные автомобили Scania и Hitachi были полностью автономными, автомобилем Fiat управляли вручную, используя человеко-машинный интерфейс для преобразования инструкций совместной системы в информацию, понятную водителю. Например, это позволило водителю безопасно присоединиться к взводу автономных транспортных средств и покинуть его.
Связь в движении
Платформа промежуточного программного обеспечения Hitachi C2X — это система нового поколения, позволяющая автомобилям обмениваться информацией для более безопасного и экологичного вождения:
- Легкий и компактный для встроенных систем
- Поддержка нескольких ОС — системы, совместимые с POSIX, включая RTOS
- Поддержка нескольких процессоров и оборудования: 11p или ARIB STD-T109-совместимый
- Соответствует ETSI ITS, IEEE 1609.Стандарты X, SAE и ITS Connect
- Прошел всесторонние полевые испытания
На заключительном демонстрационном мероприятии в Швеции проект Autonet2030 продемонстрировал совместное автономное вождение в действии, получив оценку «отлично» от Европейской комиссии и продемонстрировав технологию ряду третьих сторон.
Однако в рамках проекта удалось добиться большего, чем просто демонстрация: он создал платформу, на которой технологии и услуги могут развиваться дальше. Важный этап на пути к достижению всех преимуществ автономной мобильности, он также поддерживает бизнес-подразделения Hitachi, поскольку они реагируют на потребности клиентов в этой важной социальной сфере.
Важный этап на пути к достижению всех преимуществ автономной мобильности, он также поддерживает бизнес-подразделения Hitachi, поскольку они реагируют на потребности клиентов в этой важной социальной сфере.
Как изменится транспортная отрасль?
Атиф Аскар: Каковы возможности в области автономного вождения? Посмотрите, например, на Австралию, где Scania уже использует полностью автономный автомобиль в шахте.Он забирает свой груз и едет по стандартному маршруту. Несомненно, это было бы осуществимо и для сценария 2030 года. Уже сейчас возможно, чтобы груз Леопольда А. был доставлен с контейнеровоза на грузовик, ожидающий его дальнейшей перевозки, совершенно автономно.
Weert Canzler: Да, это вполне возможно для данной области применения, в том числе потому, что в частной собственности с юридической точки зрения проще. Однако к 2030 году полностью автономные транспортные средства вряд ли станут реальностью на дорогах общего пользования — на это потребуется значительно больше времени. Сложность, особенно в городских условиях, просто колоссальная. Взвод , или транспортные средства, движущиеся по шоссе в составе колонны, — это отдельная история.
Сложность, особенно в городских условиях, просто колоссальная. Взвод , или транспортные средства, движущиеся по шоссе в составе колонны, — это отдельная история.
Атиф Аскар: Мы считаем взводы шагом вперед на пути к автономному вождению. В 2030 году грузовик может поехать по отдельной полосе в Мюнхен. Это также облегчило бы жизнь с юридической точки зрения. Как только вы сведете к минимуму риск или больше не будет смешанного трафика, сценарий перестанет быть несбыточной мечтой.
Weert Canzler: Какую роль играет водитель в сценарии будущего?
Атиф Аскар: Действительно ключевой. Одно уже становится ясно: быть дальнобойщиком теряет свою привлекательность. В Европе уже ощущается массовая нехватка водителей. Дайте ему 15-20 лет, и мы, возможно, больше не сможем перевозить некоторые товары, потому что не будет водителей. Автоматизированное вождение или взвод снимает нагрузку с водителей и может помочь снова сделать эту профессию более востребованной.
Weert Canzler: Итак, мы много говорили о дорожном транспорте. Но что происходит, когда грузовик приближается к центру города? Помимо автоматизации, я предполагаю, что будет не так просто просто загнать большой автомобиль в центр города.
Атиф Аскар: При этом новые технологии привода, такие как электрические грузовики, также открывают новые возможности. Они не производят локальных выбросов и, самое главное, бесшумны. Таким образом, супермаркеты в жилых районах также могут пополняться ночью, не нарушая сон жителей.
Weert Canzler: Это было бы заметным улучшением текущей ситуации. Однако уже сейчас очевидно, что общественное пространство становится все более важным для жителей европейских городов. Его забирают и перераспределяют — для создания парковок, детских площадок или велосипедных дорожек. И эта тенденция будет продолжаться.
Атиф Аскар: Возвращение городского пространства, как вы это описываете, — захватывающее событие. Наш сценарий поднимает вопрос о том, как Леопольд А.товары могут быть доставлены к месту назначения. Вот тут-то и могут пригодиться так называемые хабы, например, на окраинах.
Наш сценарий поднимает вопрос о том, как Леопольд А.товары могут быть доставлены к месту назначения. Вот тут-то и могут пригодиться так называемые хабы, например, на окраинах.
Weert Canzler: Тенденция движется к более мелким единицам и децентрализованному использованию, особенно в городских районах, которые также являются жилыми. Товары Леопольда А. транспортируются по шоссе к узлам, где они перегружаются. Точное распределение будет происходить с использованием других транспортных средств, скажем, небольшого грузовика или велосипеда для доставки, в зависимости от расстояния — конечно, оба они электрические.
Атиф Аскар: Само собой разумеется, мы также обсуждаем вопрос распределения последней мили. Главный вопрос заключается в том, что происходит, когда товары прибывают в хаб: они распределяются между тремя меньшими транспортными средствами или вместо них используется одно крупное транспортное средство?
Weert Canzler: Мы должны быть готовы к различным сценариям, каждый из которых также включает реструктуризацию транспортной цепочки. Все более важным становится мыслить целостно.
Все более важным становится мыслить целостно.
Обзор литературы и направления будущих исследований
Взвод грузовиков — это набор виртуально связанных грузовиков, которые перемещаются в тандеме с небольшими расстояниями между транспортными средствами.Несколько исследований доказали, что движение взводами может значительно улучшить экономию топлива из-за снижения аэродинамического сопротивления. Однако большая часть литературы предоставляет лишь разрозненные сведения об экономии топлива в автовзводах. Поэтому необходим обзор литературы, чтобы понять, что было изучено и какие проблемы еще предстоит решить. В этой статье представлен обзор существующих исследований, чтобы проиллюстрировать современные достижения в области экономии топлива при группировании грузовиков. В частности, в нем обобщены методологии, факторы, влияющие на расход топлива, методы координации для повышения скорости взвода и стратегии упреждающего управления для создания экономичных профилей скорости для каждого транспортного средства, движущегося во взводе по разным классам дорог. После этого была введена автономная группировка грузовиков, и мы подняли и обсудили пару нерешенных вопросов, которые предстоит решить в дальнейшей работе.
После этого была введена автономная группировка грузовиков, и мы подняли и обсудили пару нерешенных вопросов, которые предстоит решить в дальнейшей работе.
1. Введение
Транспорт имеет решающее значение для общества и экономики, и автомобильные грузовые перевозки составляют почти 60% всех наземных грузовых перевозок [2]. Ожидается, что спрос на автомобильные грузовые перевозки в ближайшие годы будет расти. Как показано в отчете Американской ассоциации грузоперевозок за 2015 год [3], на долю отрасли грузоперевозок приходится почти 80% от 1 доллара.Судоходная и логистическая индустрия в США оценивается в 33 триллиона долларов. Тем не менее, было произведено много потребления топлива и выбросов парниковых газов. Например, на автомобильный транспорт приходится примерно 27% энергопотребления Европейского Союза [4]. Кроме того, Шротен и соавт. [5] указали, что на транспортные средства приходится 20% от общего объема выбросов углерода, из которых четверть приходится на большегрузные транспортные средства (HDV). Поэтому воздействие на окружающую среду в процессе перевозки необходимо срочно снизить.Кроме того, стоимость топлива занимает большую долю в общих транспортных расходах. Стоимость топлива составляла почти 30% стоимости жизненного цикла владения и эксплуатации грузовика [6]. Точно так же, согласно недавнему отчету Американского института транспортных исследований (ATRI) [7], топливо считается второй по величине статьей расходов после самой высокой стоимости персонала. С учетом большого количества HDV и растущего спроса на грузовые автомобильные перевозки можно прогнозировать, что даже небольшое повышение эффективности использования топлива может привести к значительному снижению затрат.И это также выгодно для достижения цели защиты окружающей среды за счет меньшего количества выхлопных газов. Как следствие, улучшение экономии топлива приносит большую пользу, и в последние годы стало популярной темой снижения расхода топлива во время путешествий.
Поэтому воздействие на окружающую среду в процессе перевозки необходимо срочно снизить.Кроме того, стоимость топлива занимает большую долю в общих транспортных расходах. Стоимость топлива составляла почти 30% стоимости жизненного цикла владения и эксплуатации грузовика [6]. Точно так же, согласно недавнему отчету Американского института транспортных исследований (ATRI) [7], топливо считается второй по величине статьей расходов после самой высокой стоимости персонала. С учетом большого количества HDV и растущего спроса на грузовые автомобильные перевозки можно прогнозировать, что даже небольшое повышение эффективности использования топлива может привести к значительному снижению затрат.И это также выгодно для достижения цели защиты окружающей среды за счет меньшего количества выхлопных газов. Как следствие, улучшение экономии топлива приносит большую пользу, и в последние годы стало популярной темой снижения расхода топлива во время путешествий.
К счастью, развитие интеллектуальных транспортных систем (ИТС) позволило повысить энергоэффективность транспортных сетей.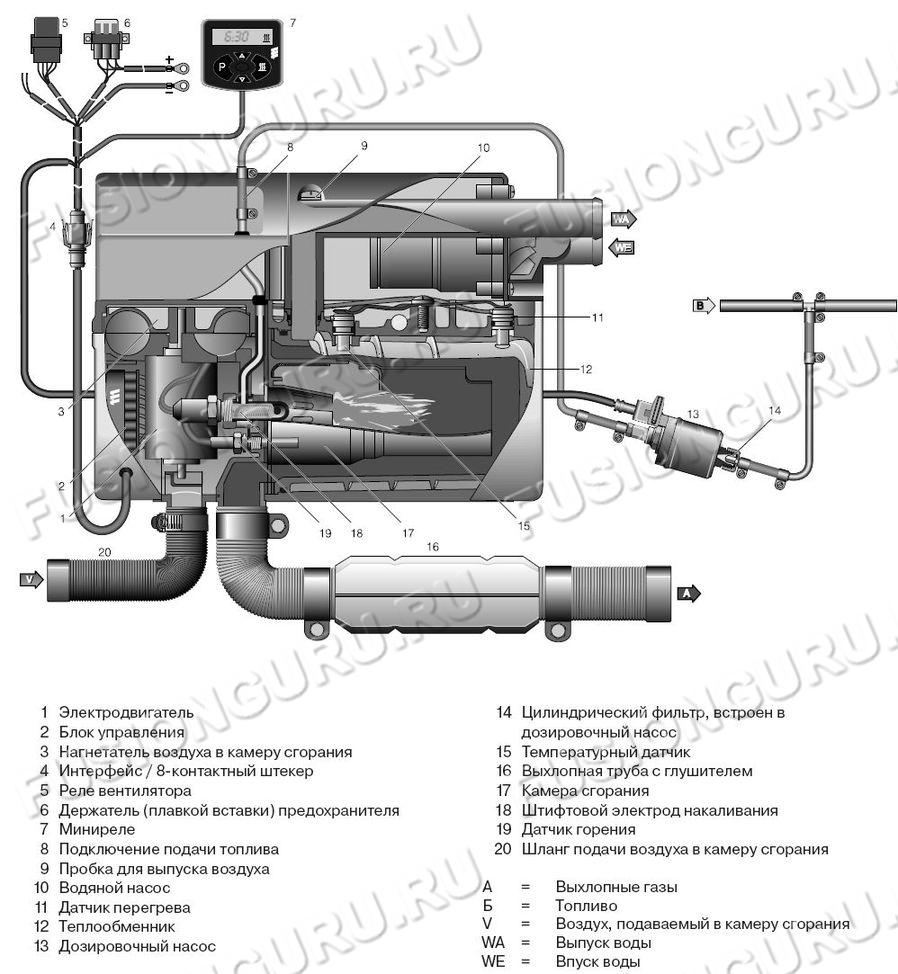 Перспективным подходом к решению этой проблемы является сокращение промежутков между транспортными средствами на дороге, которые обычно называют автомобильными взводами.Взводы грузовиков, также известные как конвои, представляют собой набор транспортных средств, образующих автопоезд, которые движутся близко друг к другу в один ряд, чтобы уменьшить сопротивление воздуха. Это может значительно снизить расход топлива, поскольку около четверти расхода топлива связано с аэродинамическим сопротивлением [8]. В результате можно улучшить экономию топлива и добиться экологичности за счет меньшего выброса парниковых газов во взводе. Помимо экономии топлива, взводы грузовиков также могут способствовать увеличению пропускной способности дорог и уменьшать заторы на дорогах за счет меньшего расстояния между транспортными средствами.
Перспективным подходом к решению этой проблемы является сокращение промежутков между транспортными средствами на дороге, которые обычно называют автомобильными взводами.Взводы грузовиков, также известные как конвои, представляют собой набор транспортных средств, образующих автопоезд, которые движутся близко друг к другу в один ряд, чтобы уменьшить сопротивление воздуха. Это может значительно снизить расход топлива, поскольку около четверти расхода топлива связано с аэродинамическим сопротивлением [8]. В результате можно улучшить экономию топлива и добиться экологичности за счет меньшего выброса парниковых газов во взводе. Помимо экономии топлива, взводы грузовиков также могут способствовать увеличению пропускной способности дорог и уменьшать заторы на дорогах за счет меньшего расстояния между транспортными средствами.
В последние годы, с развитием технологии автономного вождения, транспортные средства оснащаются несколькими датчиками, позволяющими им наблюдать за окружающей обстановкой и в режиме реального времени решать, какие действия следует предпринять, которые называются «автономными транспортными средствами» или «автономными транспортными средствами». ” Беспилотные транспортные средства могут координировать свой путь во время вождения, и они могут двигаться взводом с меньшими интервалами, чтобы снизить расход топлива. Кроме того, при автоматическом вождении взводом можно снизить риск наезда сзади и повысить безопасность движения.
” Беспилотные транспортные средства могут координировать свой путь во время вождения, и они могут двигаться взводом с меньшими интервалами, чтобы снизить расход топлива. Кроме того, при автоматическом вождении взводом можно снизить риск наезда сзади и повысить безопасность движения.
Обладая большими преимуществами, упомянутыми выше, автомобильные взводы привлекли внимание многих правительств и исследовательских институтов. В результате было предложено несколько проектов, связанных со взводами. Первыми исследованиями по автоматизации грузовиков были «Шофер» в рамках проекта ЕС T-TAP с середины 1990-х до начала 2000-х годов [9]. Во время проекта Боннет и Фриц [10] провели эксперимент с двумя грузовиками, соединенными «электронным фаркопом», чтобы количественно оценить экономию топлива. После этого калифорнийская программа PATH начала свои исследования взвода тяжелых грузовиков.В программе PATH все машины были полностью автоматизированы, включая ведущую. Например, в 2004 году программа провела тест на расход топлива с двумя тандемными грузовиками, связанными электронной системой управления для разных пространств [11]. Проект «KONVOI» также посвящен взводам грузовиков, где группа немецких ученых разработала взвод из четырех тяжелых грузовиков с целью улучшения экономии топлива и увеличения пропускной способности дороги [12]. SARTRE — это проект FP7, финансируемый Европейской комиссией [13]. Ведущими транспортными средствами в SARTRE являются полноприводные автомобили с ручным управлением, а следующие за ними транспортные средства движутся автоматически как в поперечном, так и в продольном направлении без изменения инфраструктуры, такой как выделенные полосы движения.Кроме того, стартовавший в 2008 году 5-летний проект «Энергетическая ИТС» направлен на энергосбережение и предотвращение глобального потепления за счет автопарковки. В этом проекте был разработан взвод из 3 полностью автоматизированных грузовиков, которые двигались со скоростью 80 км/ч с интервалом 10 м по скоростной автомагистрали перед общественным использованием [14]. Ведутся и другие соответствующие проекты, такие как GCDC, SCANIA и т.
Проект «KONVOI» также посвящен взводам грузовиков, где группа немецких ученых разработала взвод из четырех тяжелых грузовиков с целью улучшения экономии топлива и увеличения пропускной способности дороги [12]. SARTRE — это проект FP7, финансируемый Европейской комиссией [13]. Ведущими транспортными средствами в SARTRE являются полноприводные автомобили с ручным управлением, а следующие за ними транспортные средства движутся автоматически как в поперечном, так и в продольном направлении без изменения инфраструктуры, такой как выделенные полосы движения.Кроме того, стартовавший в 2008 году 5-летний проект «Энергетическая ИТС» направлен на энергосбережение и предотвращение глобального потепления за счет автопарковки. В этом проекте был разработан взвод из 3 полностью автоматизированных грузовиков, которые двигались со скоростью 80 км/ч с интервалом 10 м по скоростной автомагистрали перед общественным использованием [14]. Ведутся и другие соответствующие проекты, такие как GCDC, SCANIA и т. д. [13].
д. [13].
Литература по автопаркам с точки зрения экономии топлива в основном делится на пять категорий. Одна категория посвящена уменьшению сопротивления воздуха с помощью испытаний в аэродинамической трубе или вычислительной гидродинамики (CFD).Вторая категория в первую очередь направлена на подтверждение экономии топлива в различных условиях путем проведения дорожных или дорожных испытаний. Третья категория вращается вокруг координации и оптимизации взводов грузовиков для увеличения скорости взводов. И четвертый в основном ориентирован на расчет профиля скорости транспортных средств для экономии топлива при движении в условиях меняющегося рельефа дороги. В настоящее время автономные технологии широко применяются в сфере автономных грузоперевозок [15]. И с этой целью взводы беспилотных грузовиков привлекли большое внимание исследовательского сообщества и промышленности.
Методы исследования, влияющие факторы и средства координации были обобщены в соответствии с классификацией литературы в этой статье. Исходя из этого, предлагается несколько вопросов, которые будут рассмотрены в следующем исследовании. Остальная часть этой статьи структурирована следующим образом. В разделе 2 мы кратко представляем наши стратегии поиска релевантных статей. А в Разделе 3 обсуждаются основные методы исследования. За этим следует анализ связанных факторов в разделе 4. Затем в разделах 5 и 6 вводятся вопросы координации и оптимизации, а также упреждающего управления для групп грузовиков для дальнейшего повышения экономии топлива.Кроме того, в Разделе 7 мы объясняем три уровня автономных группировок грузовиков. После этого в Разделе 8 представлены задачи, которые предстоит решить в будущих исследованиях.
Исходя из этого, предлагается несколько вопросов, которые будут рассмотрены в следующем исследовании. Остальная часть этой статьи структурирована следующим образом. В разделе 2 мы кратко представляем наши стратегии поиска релевантных статей. А в Разделе 3 обсуждаются основные методы исследования. За этим следует анализ связанных факторов в разделе 4. Затем в разделах 5 и 6 вводятся вопросы координации и оптимизации, а также упреждающего управления для групп грузовиков для дальнейшего повышения экономии топлива.Кроме того, в Разделе 7 мы объясняем три уровня автономных группировок грузовиков. После этого в Разделе 8 представлены задачи, которые предстоит решить в будущих исследованиях.
2. Метод поиска
соответствующие исследования экономии топлива в автомобильных взводах. Поскольку цель этой статьи состоит в том, чтобы понять, что было изучено в аспекте расхода топлива в автопарках, жизненно важно иметь общее представление об основных темах в этой области.
Литература по данной теме была собрана и отобрана из онлайновых электронных баз данных, таких как Web of Science, IEEE, ScienceDirect, SAE Journals и Springer Link. И несколько статей были получены путем отслеживания цитируемых ссылок из электронных каталогов с помощью Google Scholar, чтобы свести к минимуму вероятность пропуска важных ссылок. Путем поиска по ключевым словам «взводы грузовиков» в сочетании с «экономией топлива» или «расходом топлива» мы обнаружили, что изучение экономии топлива в взводах грузовиков привлекало внимание ученых с 1990-х годов.
И несколько статей были получены путем отслеживания цитируемых ссылок из электронных каталогов с помощью Google Scholar, чтобы свести к минимуму вероятность пропуска важных ссылок. Путем поиска по ключевым словам «взводы грузовиков» в сочетании с «экономией топлива» или «расходом топлива» мы обнаружили, что изучение экономии топлива в взводах грузовиков привлекало внимание ученых с 1990-х годов.
После этого найденные документы были отправлены в Mendeley для дальнейшего изучения. Процесс отбора в основном делился на два этапа. Во-первых, путем пересмотра названия и аннотации была удалена часть неактуальных публикаций. После этого был просмотрен полный текст каждой статьи, чтобы определить, действительно ли она связана с темой. Используя описанную выше стратегию отбора, 54 публикации были сохранены для дальнейшего изучения в обзоре. После этого каждая оставшаяся статья была тщательно просмотрена, и мы классифицировали 54 исследования в соответствии с их методологией и содержанием исследования.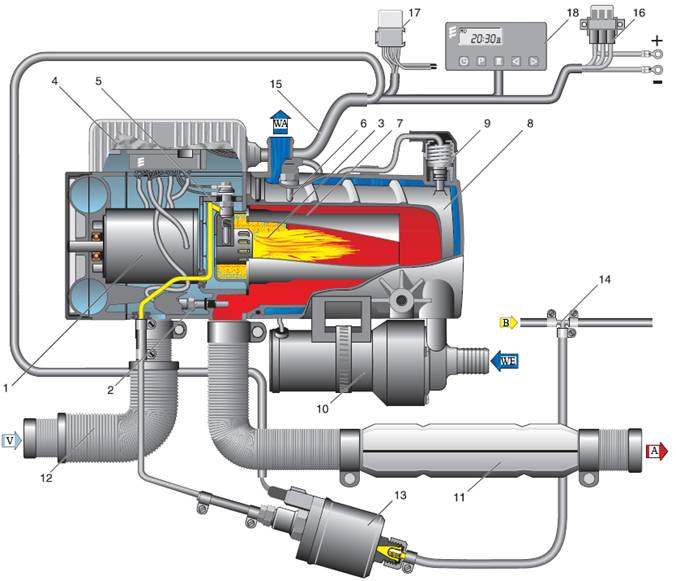
Хотя наше исследование, возможно, не является исчерпывающим, оно в достаточной степени показывает, что было изучено до сих пор в аспекте экономии топлива при группировании грузовиков, и может предложить некоторые достойные предложения для будущих исследований.
3. Методы исследования топливной экономичности
С 1990-х годов набирает обороты изучение топливной экономичности автопоездов. Среди этих исследований используются три основных метода, включая испытания в аэродинамической трубе, дорожные/дорожные испытания и методы моделирования (в основном CFD).При испытаниях в аэродинамической трубе экспериментальные условия, такие как скорость ветра, направление ветра и расстояния между транспортными средствами, можно контролировать более точно, и поэтому можно проводить повторяемые эксперименты. Дорожные или трековые испытания более достоверны, чем два других метода. Однако выполнение надежных измерений расхода топлива на реальном транспортном средстве сложно и требует много времени. Кроме того, окружающие факторы не повторяются, и безопасность является важным фактором, который необходимо учитывать. Что касается моделирования CFD, можно изучить различия между транспортными средствами в снижении сопротивления воздуха.В этом разделе будут описаны упомянутые выше методы исследования. В таблице 1 приведены сводные данные первичных исследований.
Кроме того, окружающие факторы не повторяются, и безопасность является важным фактором, который необходимо учитывать. Что касается моделирования CFD, можно изучить различия между транспортными средствами в снижении сопротивления воздуха.В этом разделе будут описаны упомянутые выше методы исследования. В таблице 1 приведены сводные данные первичных исследований.
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
в 1990-е годы большинство исследователей уделяли пристальное внимание на аэродинамической трубе для снижения аэродинамического сопротивления в караване . Затем были проведены трековые и дорожные испытания, чтобы понять экономию топлива во время взвода. Как показано в Таблице 1, трековые испытания более распространены по сравнению с дорожными испытаниями, возможно, из-за безопасности. Из-за огромной стоимости и ненадежности дорожных/путевых испытаний в последние годы применялись CFD или другие методы моделирования, которые часто сочетались с другими способами тестирования и проверки результатов.
Затем были проведены трековые и дорожные испытания, чтобы понять экономию топлива во время взвода. Как показано в Таблице 1, трековые испытания более распространены по сравнению с дорожными испытаниями, возможно, из-за безопасности. Из-за огромной стоимости и ненадежности дорожных/путевых испытаний в последние годы применялись CFD или другие методы моделирования, которые часто сочетались с другими способами тестирования и проверки результатов.
Эксперименты в аэродинамических трубах позволяют измерить изменения аэродинамического сопротивления на разных расстояниях.Набор датчиков устанавливается на модели грузовиков, а модели размещаются в аэродинамических трубах. Например, модели GM Lumina APV 1991 года в масштабе одной восьмой использовались для количественной оценки поведения лобового сопротивления транспортного средства в зависимости от расстояния между транспортными средствами в аэродинамической трубе [16]. Однако взводы грузовиков не всегда идеально выровнены. При формировании взводов или когда один из членов близко расположенных машин достигает пункта назначения и должен выйти из взвода, выравнивание машин нарушается. Чтобы понять аэродинамическое взаимодействие между несоосными транспортными средствами, был проведен эксперимент в аэродинамической трубе с использованием моделей минивэна Chevy Lumina 1991 года в масштабе 1/8 [17].Кроме того, изучалось влияние бокового ветра на аэродинамические взаимодействия в автопоездах. Боковой ветер моделировался рысканием взвода на десять градусов по отношению к оси аэродинамической трубы. Результаты показали, что снижение лобового сопротивления не исчезает в условиях бокового ветра [19].
Чтобы понять аэродинамическое взаимодействие между несоосными транспортными средствами, был проведен эксперимент в аэродинамической трубе с использованием моделей минивэна Chevy Lumina 1991 года в масштабе 1/8 [17].Кроме того, изучалось влияние бокового ветра на аэродинамические взаимодействия в автопоездах. Боковой ветер моделировался рысканием взвода на десять градусов по отношению к оси аэродинамической трубы. Результаты показали, что снижение лобового сопротивления не исчезает в условиях бокового ветра [19].
Хотя уменьшение аэродинамического сопротивления может частично выявить тенденцию к экономии топлива, необходимы более прямые и определенные способы количественной оценки экономии топлива во взводе. Настоящие грузовики используются для проведения экспериментов по трассовым и дорожным испытаниям с целью измерения расхода топлива.Трековые испытания проводятся на закрытых площадках, без какого-либо другого движения, кроме испытуемых автомобилей. Трековые испытания в большинстве случаев соответствуют стандарту SAE Type II Fuel Economy. Например, была проведена серия из десяти модифицированных гусеничных испытаний SAE Type II J1321, чтобы задокументировать снижение расхода топлива [26]. Кроме того, для корреляции расчетных исследований был проведен тест на экономию топлива SAE Type II, соответствующий стандарту SAE J1321 [31]. Маколифф и др. [33] также провели модифицированную версию процедуры испытания расхода топлива SAE J1321 Type II, чтобы оценить экономию топлива.
Например, была проведена серия из десяти модифицированных гусеничных испытаний SAE Type II J1321, чтобы задокументировать снижение расхода топлива [26]. Кроме того, для корреляции расчетных исследований был проведен тест на экономию топлива SAE Type II, соответствующий стандарту SAE J1321 [31]. Маколифф и др. [33] также провели модифицированную версию процедуры испытания расхода топлива SAE J1321 Type II, чтобы оценить экономию топлива.
Дорожные испытания проводятся на шоссе, что является более убедительным методом. Однако, согласно предыдущим исследованиям, большинство дорожных испытаний проводились на скоростных автомагистралях перед общественным движением или на автомагистралях с низкой суточной интенсивностью движения с учетом безопасности [14, 24, 28]. Поэтому, хотя условия испытаний аналогичны реальным дорогам, эти исследования также не могут отражать влияние другого транспорта на расход топлива. В виде исключения один эксперимент был проведен на двух шоссе Техаса, чтобы определить влияние условий окружающего движения на встречный поток воздуха к транспортному средству [27]. После этого Алам и др. [29] проводили эксперименты на дорогах общего пользования с разным уклоном, при наличии движения и при различных погодных условиях. Результат показал, что взвод может значительно снизить расход топлива, а уровень дорожного покрытия оказывает большое влияние на экономию топлива.
После этого Алам и др. [29] проводили эксперименты на дорогах общего пользования с разным уклоном, при наличии движения и при различных погодных условиях. Результат показал, что взвод может значительно снизить расход топлива, а уровень дорожного покрытия оказывает большое влияние на экономию топлива.
Моделирование CFD является относительно новым методом, который можно использовать в этой области. Строятся модели грузовиков и модели турбулентности, а также моделируется ветер в соответствии с гидродинамикой. CFD используется для изучения изменений аэродинамики во взводе [21].Но в большинстве случаев CFD сочетается с другими средствами, такими как дорожные или трековые испытания, для проверки результатов [25, 27, 30, 31]. Помимо CFD, в недавних исследованиях применялись и другие методы моделирования. Например, Алам и др. [23] построили модель грузовика в инструменте моделирования под названием Dymola. В этом методе часть трансмиссии грузовика, такая как двигатель, коробка передач, сцепление и т. д., была детально смоделирована в соответствии с реальным поведением грузовика, что привело к модели, состоящей из 3313 переменных, 1058 уравнений и 626 состояний. .В этой модели для управления грузовыми автомобилями была реализована логика адаптивного круиз-контроля (ACC) и круиз-контроля (CC). Хотя усовершенствованная модель грузовика с программным обеспечением CC/ACC более достоверна, чем моделирование CFD, этот метод не может показать изменения аэродинамики для каждого автомобиля во взводе.
д., была детально смоделирована в соответствии с реальным поведением грузовика, что привело к модели, состоящей из 3313 переменных, 1058 уравнений и 626 состояний. .В этой модели для управления грузовыми автомобилями была реализована логика адаптивного круиз-контроля (ACC) и круиз-контроля (CC). Хотя усовершенствованная модель грузовика с программным обеспечением CC/ACC более достоверна, чем моделирование CFD, этот метод не может показать изменения аэродинамики для каждого автомобиля во взводе.
Эксперименты, проводимые посредством испытаний в аэродинамической трубе, испытаний на треке и CFD, представляют собой моделирование реальной среды. Различия между симуляцией и реальным трафиком могут привести к запутанным результатам.Следовательно, модели грузовиков, ветровая среда и дорожные условия должны быть смоделированы в сравнении с реальными ситуациями, чтобы максимально исключить неблагоприятные последствия. Что касается дорожных испытаний, то они могут преодолеть упомянутые выше недостатки в моделировании. Тем не менее, безопасность является важным фактором, который следует учитывать. В целях безопасности разделительные промежутки между испытательными тележками не должны быть слишком маленькими. В заключение следует отметить, что у каждого метода есть свои преимущества и недостатки, поэтому следует комбинировать несколько средств, чтобы сбалансировать надежность и безопасность в будущих исследованиях.
4. Факторы, влияющие на экономию топлива
Экономия топлива во взводе связана со многими факторами. В этом разделе анализируются несколько важных факторов в соответствии с первичными исследованиями. Справочный номер основных влияющих факторов показан на рисунке 1.
Как показано на рисунке 1, почти во всех статьях обсуждаются продольные пространства. Чтобы изучить влияние расстояния между грузовиками на расход топлива, Бонне и Фриц [10] провели серию тестов на гусеницах и предположили, что расстояние между грузовиками в 10 м кажется оптимальным.В 2004 году было проведено еще одно испытание на треке, и результаты показали, что средняя экономия расхода топлива, которую необходимо достичь, варьировалась от примерно 11% на 3–4 м до примерно 8 % на 8–10 м [11]. Кроме того, Ламмерт и соавт. [26] обнаружили, что среднее снижение расхода топлива ведущего трактора улучшилось при уменьшении разделительных расстояний, при этом результаты показали экономию топлива от 2,7% до 5,3% при следующих расстояниях от 20 до 75 футов. Кроме того, дорожные испытания показали, что 13 % экономии энергии при зазоре 10 м и 18% экономии при 4.был получен зазор 7 м [28]. Кроме того, была испытана система помощи водителю-помощнику-грузовику (DATP), в которой общая экономия топлива взвода транспортных средств монотонно улучшалась по мере уменьшения расстояния между транспортными средствами [30, 31]. В исследовании Маколиффа наибольшая чистая экономия топлива составила до 14,2% на кратчайшем расстоянии 17,4 м [32]. В целом сделан общий вывод, что чем меньше продольный разнос, тем лучше общие показатели расхода топлива во взводе.
Кроме того, Ламмерт и соавт. [26] обнаружили, что среднее снижение расхода топлива ведущего трактора улучшилось при уменьшении разделительных расстояний, при этом результаты показали экономию топлива от 2,7% до 5,3% при следующих расстояниях от 20 до 75 футов. Кроме того, дорожные испытания показали, что 13 % экономии энергии при зазоре 10 м и 18% экономии при 4.был получен зазор 7 м [28]. Кроме того, была испытана система помощи водителю-помощнику-грузовику (DATP), в которой общая экономия топлива взвода транспортных средств монотонно улучшалась по мере уменьшения расстояния между транспортными средствами [30, 31]. В исследовании Маколиффа наибольшая чистая экономия топлива составила до 14,2% на кратчайшем расстоянии 17,4 м [32]. В целом сделан общий вывод, что чем меньше продольный разнос, тем лучше общие показатели расхода топлива во взводе.
Помимо соблюдения дистанции, конфигурация транспортных средств также оказывает большое влияние на экономию топлива взводами грузовиков. Эллис и др. [21] исследовали эффект взвода на четырех все более аэродинамических конфигурациях тягач-трейлер. Он пришел к выводу, что снижение аэродинамического сопротивления увеличилось при добавлении улучшенных аэродинамических устройств. В 2017 и 2018 годах грузовики в различных конфигурациях применялись в гусеничных испытаниях, и результаты показали, что аэродинамическая конфигурация с прицепом показала больший процент экономии топлива из-за взвода, чем стандартный прицеп [32, 33].
Эллис и др. [21] исследовали эффект взвода на четырех все более аэродинамических конфигурациях тягач-трейлер. Он пришел к выводу, что снижение аэродинамического сопротивления увеличилось при добавлении улучшенных аэродинамических устройств. В 2017 и 2018 годах грузовики в различных конфигурациях применялись в гусеничных испытаниях, и результаты показали, что аэродинамическая конфигурация с прицепом показала больший процент экономии топлива из-за взвода, чем стандартный прицеп [32, 33].
Положение машины во взводе также может влиять на расход топлива. В 2011 году на Nevada SR-722 были испытаны три тягача 8-го класса. Данные показали, что ведущий грузовик сократил расход топлива примерно на 18 %, в то время как второй грузовик сэкономил 24 %, а третий грузовик сэкономил 23 % [24]. Точно так же Давила и соавт. [25] обнаружили, что следующий за ним трактор может обеспечить экономию топлива примерно на 16%, в то время как ведущее транспортное средство может добиться заметной экономии топлива на 8%. Ламмерт и др. [26] указали, что прицепное транспортное средство может иметь больше преимуществ, чем ведущий тягач с 2.Экономия топлива от 8% до 9,7% по сравнению с 2,7% до 5,3%. Во взводе из трех машин был достигнут тот же результат, что прицепная машина испытала оптимальную экономию топлива из трех машин [32].
Ламмерт и др. [26] указали, что прицепное транспортное средство может иметь больше преимуществ, чем ведущий тягач с 2.Экономия топлива от 8% до 9,7% по сравнению с 2,7% до 5,3%. Во взводе из трех машин был достигнут тот же результат, что прицепная машина испытала оптимальную экономию топлива из трех машин [32].
Кроме того, масса и загруженность грузовиков также влияют на потребление энергии. Были проведены эксперименты, и результаты показали, что прицеп общей массой 28 тонн обеспечивает снижение расхода топлива примерно на 21%, в то время как для прицепа массой 40 тонн можно прогнозировать экономию топлива на 17% [10]. .Что касается нагрузок, тяжелые нагрузки повлияют на процентную экономию от взвода, но все равно приведут к значительной экономии топлива согласно [26]. Например, когда грузовик был порожним, экономия энергии составила 13 % при зазоре 10 м и 18 % при зазоре 4,7 м. При обычной загрузке грузовика экономия топлива составит 8% и 15% соответственно [28]. Кроме того, для пустого прицепа наблюдалось увеличение экономии топлива на 1,6%, связанное с системой взвода кооперативного адаптивного круиз-контроля (CACC), по сравнению с загруженным прицепом [32]. Кроме того, Алам и соавт. [23] изучали влияние стратегии ACC на экономию топлива при различной массе транспортных средств.
Кроме того, Алам и соавт. [23] изучали влияние стратегии ACC на экономию топлива при различной массе транспортных средств.
Что касается влияния скорости на экономию топлива, Mcauliffe et al. [32, 33] предположили, что не наблюдалось значительного влияния скорости транспортного средства на экономию топлива от системы взвода САСС.
Подводя итог, можно сказать, что на снижение расхода топлива во взводе влияет множество факторов. Хотя испытания, проведенные в разных условиях, могут дать разные результаты, общая тенденция сводится к следующему: (1) Экономия топлива будет улучшаться при уменьшении межтранспортного пространства (2) Аэродинамические конфигурации прицепа, такие как юбки прицепа и хвостовая часть прицепа. могут иметь большую процентную экономию топлива, чем стандартные прицепы(3)В составе взвода прицепные транспортные средства обычно обеспечивают оптимальную экономию топлива(4)При увеличении массы или нагрузки снижение расхода топлива частично уменьшается(5)Скорость взвода не показывает заметное влияние на экономию топлива
5.
 Координация и оптимизация взвода грузовиков
Координация и оптимизация взвода грузовиков Большая часть упомянутой выше современной литературы посвящена транспортным средствам, уже состоящим в взводе. Однако на практике это не всегда так. Другими словами, хотя экономия топлива может быть улучшена при движении в составе взвода, транспортные средства обычно назначаются для разных транспортных задач (с разными пунктами отправления, пунктами назначения и временем доставки) и разбросаны по дороге. В результате взводы не складываются стихийно на дорожной сети.Лян и др. [34] проанализировали разрозненные данные о местоположении транспортных средств из региона Европы в течение одного дня, и результат показал, что скорость самопроизвольного взвода составила 1,2%, что привело к общей экономии топлива 0,07% по сравнению с отсутствием ни одного из транспортных средств. были взводом. Аналогичные результаты были получены и в 2015 г. [35]. При крупномасштабном моделировании немецкой сети автобанов наблюдалась экономия в размере 5%. Кроме того, авторы проанализировали реальные данные HDV и обнаружили, что существовали потенциальные возможности взвода. Поэтому важно координировать работу грузовиков, чтобы увеличить скорость взвода и сэкономить топливо.
Поэтому важно координировать работу грузовиков, чтобы увеличить скорость взвода и сэкономить топливо.
В этом разделе обсуждаются координация и оптимизация грузовиков, чтобы подтвердить, когда и как формировать взвод, чтобы в полной мере улучшить экономию топлива. В Таблице 2 приведены несколько существующих оптимизаций взвода грузовиков.
| |||||||||||||||||||||||||||||||||||||||||||
 ]
] В 2013 году Каммер [36] разработал всеобъемлющую математическую формулировку задачи планирования маршрута и представил подход к глобальному решению этой проблемы.Затем автор продвигал локально распределенный подход для снижения вычислительной сложности. Моделирование показало, что можно добиться значительной экономии на модели немецкой сети автобанов, состоящей из 647 узлов, 695 краев и 12 возможных пунктов назначения с несколькими сотнями грузовиков. Ларссон и др. [37] определили задачу маршрутизации, названную задачей взвода, и доказали, что задача является NP-трудной, даже если все грузовики стартовали в одно и то же время и в одном и том же месте. После этого к задаче были применены две эвристики с локальным поиском.И их производительность сравнивается с оптимальными решениями на немецкой дорожной сети автобанов, которая содержала 647 узлов и 1390 ребер. Затем Нурмохаммадзаде и Хартманн [38] представили нелинейную математическую модель для задачи взвода. Более того, генетический алгоритм был применен для решения больших задач за относительно короткое время.
В 2013 году Каммер [36] разработал всеобъемлющую математическую формулировку задачи планирования маршрута и представил подход к глобальному решению этой проблемы.Затем автор продвигал локально распределенный подход для снижения вычислительной сложности. Моделирование показало, что можно добиться значительной экономии на модели немецкой сети автобанов, состоящей из 647 узлов, 695 краев и 12 возможных пунктов назначения с несколькими сотнями грузовиков. Ларссон и др. [37] определили задачу маршрутизации, названную задачей взвода, и доказали, что задача является NP-трудной, даже если все грузовики стартовали в одно и то же время и в одном и том же месте. После этого к задаче были применены две эвристики с локальным поиском.И их производительность сравнивается с оптимальными решениями на немецкой дорожной сети автобанов, которая содержала 647 узлов и 1390 ребер. Затем Нурмохаммадзаде и Хартманн [38] представили нелинейную математическую модель для задачи взвода. Более того, генетический алгоритм был применен для решения больших задач за относительно короткое время.
 При перекрытии маршрутов транспортное средство будет ждать в определенном месте встречи, чтобы сформировать взвод, если стоимость ожидания будет ниже, чем выгода от взвода [39]. Лян и др. [40] предложил метод, позволяющий ведомому транспортному средству двигаться быстрее, чтобы догнать ведущее транспортное средство, которое поддерживало постоянную скорость до места назначения. Расстояние между машинами и расстояние до пункта назначения будет зависеть от того, будет ли выгоднее сформировать взвод, чем поддерживать текущую скорость.После этого в 2016 году был предложен новый алгоритм [41] как естественное и значительное расширение Liang et al. [40]. В этой статье всем транспортным средствам, движущимся по одному и тому же маршруту, разрешалось регулировать свою скорость, чтобы сформировать взвод, а не только следующие транспортные средства. Кроме того, Лян и соавт. [34] проанализировали потенциал взвода на основе данных датчиков транспортных средств и представили несколько схем координации для увеличения возможностей взвода.
При перекрытии маршрутов транспортное средство будет ждать в определенном месте встречи, чтобы сформировать взвод, если стоимость ожидания будет ниже, чем выгода от взвода [39]. Лян и др. [40] предложил метод, позволяющий ведомому транспортному средству двигаться быстрее, чтобы догнать ведущее транспортное средство, которое поддерживало постоянную скорость до места назначения. Расстояние между машинами и расстояние до пункта назначения будет зависеть от того, будет ли выгоднее сформировать взвод, чем поддерживать текущую скорость.После этого в 2016 году был предложен новый алгоритм [41] как естественное и значительное расширение Liang et al. [40]. В этой статье всем транспортным средствам, движущимся по одному и тому же маршруту, разрешалось регулировать свою скорость, чтобы сформировать взвод, а не только следующие транспортные средства. Кроме того, Лян и соавт. [34] проанализировали потенциал взвода на основе данных датчиков транспортных средств и представили несколько схем координации для увеличения возможностей взвода. Система вернула маршруты и профили скорости для транспортных средств, чтобы сформировать взводы. Чтобы справиться с задачами реалистичного размера, автор предложил итерационный алгоритм для быстрого вычисления хороших, но не обязательно оптимальных решений для каждого грузовика.
Система вернула маршруты и профили скорости для транспортных средств, чтобы сформировать взводы. Чтобы справиться с задачами реалистичного размера, автор предложил итерационный алгоритм для быстрого вычисления хороших, но не обязательно оптимальных решений для каждого грузовика. Таким образом, предварительная информация об уклонах дорог должна использоваться при разработке стратегий экономичного вождения в группах грузовиков, и это обсуждается в этом разделе.
Таким образом, предварительная информация об уклонах дорог должна использоваться при разработке стратегий экономичного вождения в группах грузовиков, и это обсуждается в этом разделе. После этого использование структуры прогнозирующего управления моделью (MPC), которая может генерировать оптимальную траекторию скорости посредством онлайн-оптимизации, улучшило системы PCC. В рамках MPC динамическое программирование (DP) широко использовалось для численного решения задачи оптимизации на каждой итерации, таким образом создавая траекторию оптимальной скорости для транспортного средства [49]. Другой альтернативный подход, называемый оптимизацией профиля скорости (SPO), был предложен в 2017 году [49]. В этом методе создается оптимальный профиль скорости для более длинного участка дороги, и может быть достигнута большая экономия топлива, чем в методах, основанных на ПДК.Кроме того, SPO не требует никаких итерационных онлайн-расчетов и не требует обновления профиля оптимальной скорости. Следовательно, вычисление менее затратно, чем MPC.
После этого использование структуры прогнозирующего управления моделью (MPC), которая может генерировать оптимальную траекторию скорости посредством онлайн-оптимизации, улучшило системы PCC. В рамках MPC динамическое программирование (DP) широко использовалось для численного решения задачи оптимизации на каждой итерации, таким образом создавая траекторию оптимальной скорости для транспортного средства [49]. Другой альтернативный подход, называемый оптимизацией профиля скорости (SPO), был предложен в 2017 году [49]. В этом методе создается оптимальный профиль скорости для более длинного участка дороги, и может быть достигнута большая экономия топлива, чем в методах, основанных на ПДК.Кроме того, SPO не требует никаких итерационных онлайн-расчетов и не требует обновления профиля оптимальной скорости. Следовательно, вычисление менее затратно, чем MPC. Таким образом, можно объединить преимущества взвода и LAC, чтобы полностью использовать потенциал снижения расхода топлива.Однако, несмотря на то, что несколько методов, учитывающих различные уклоны, позволили создать оптимальную скоростную траекторию для одиночного HDV, эти стратегии могут быть неприменимы при движении в составе взвода. К счастью, исследователи осознали важность этой проблемы и сконцентрировались на использовании информации о предварительном просмотре уклонов дорог для управления взводами HDV.
Таким образом, можно объединить преимущества взвода и LAC, чтобы полностью использовать потенциал снижения расхода топлива.Однако, несмотря на то, что несколько методов, учитывающих различные уклоны, позволили создать оптимальную скоростную траекторию для одиночного HDV, эти стратегии могут быть неприменимы при движении в составе взвода. К счастью, исследователи осознали важность этой проблемы и сконцентрировались на использовании информации о предварительном просмотре уклонов дорог для управления взводами HDV. Подобный контроллер был описан в 2014 году, а стратегия была определена как кооперативный упреждающий контроллер для взвода (CLAC) [51]. В том же году была представлена двухуровневая архитектура системы управления в качестве подхода к упреждающему управлению группировкой HDV [52].Здесь два уровня архитектуры состояли из уровня координатора взвода и уровня отслеживания траектории движения транспортного средства. Координатор взвода отвечал за создание профиля скорости, оптимального для расхода топлива, для всего взвода в соответствии с предварительной информацией о топографии дороги. Уровень контроллера транспортного средства генерировал управление транспортным средством в реальном времени в соответствии с эталонным профилем скорости, обеспечивая при этом безопасность. На основе архитектуры управления была разработана предиктивная стратегия управления. Двухуровневая архитектура также была объяснена в Turri et al.[52], и было выполнено моделирование нескольких реалистичных сценариев для определения эффективности предлагаемого контроллера.
Подобный контроллер был описан в 2014 году, а стратегия была определена как кооперативный упреждающий контроллер для взвода (CLAC) [51]. В том же году была представлена двухуровневая архитектура системы управления в качестве подхода к упреждающему управлению группировкой HDV [52].Здесь два уровня архитектуры состояли из уровня координатора взвода и уровня отслеживания траектории движения транспортного средства. Координатор взвода отвечал за создание профиля скорости, оптимального для расхода топлива, для всего взвода в соответствии с предварительной информацией о топографии дороги. Уровень контроллера транспортного средства генерировал управление транспортным средством в реальном времени в соответствии с эталонным профилем скорости, обеспечивая при этом безопасность. На основе архитектуры управления была разработана предиктивная стратегия управления. Двухуровневая архитектура также была объяснена в Turri et al.[52], и было выполнено моделирование нескольких реалистичных сценариев для определения эффективности предлагаемого контроллера. Кроме того, Алам и соавт. [29] представили трехуровневую архитектуру системы, состоящую из транспортного уровня, уровня взвода и уровня транспортного средства. Транспортный уровень отвечал за транспортное планирование и маршрутизацию транспортных средств. Функция уровня взвода и уровня транспортных средств была аналогична двухуровневой архитектуре системы управления, упомянутой выше. Тораби [49] также интересовался стратегиями экономичного вождения для HDV, движущихся по автомагистралям с переменным рельефом.Он предложил метод, названный оптимизацией профиля скорости для взвода (P-SPO), с использованием генетического алгоритма для поиска экономичных профилей скорости. Кроме того, в [53] обсуждалась кооперативная стратегия упреждающего управления, и результаты моделирования показали, что предложенная стратегия управления может значительно повысить эффективность использования топлива по сравнению с эталонными показателями. Здесь эталоном были стандартные методы управления взводом транспортных средств, такие как круиз-контроль с политикой пространственного разрыва (CC-SG) и круиз-контроль с политикой интервального интервала (CC-HG).
Кроме того, Алам и соавт. [29] представили трехуровневую архитектуру системы, состоящую из транспортного уровня, уровня взвода и уровня транспортного средства. Транспортный уровень отвечал за транспортное планирование и маршрутизацию транспортных средств. Функция уровня взвода и уровня транспортных средств была аналогична двухуровневой архитектуре системы управления, упомянутой выше. Тораби [49] также интересовался стратегиями экономичного вождения для HDV, движущихся по автомагистралям с переменным рельефом.Он предложил метод, названный оптимизацией профиля скорости для взвода (P-SPO), с использованием генетического алгоритма для поиска экономичных профилей скорости. Кроме того, в [53] обсуждалась кооперативная стратегия упреждающего управления, и результаты моделирования показали, что предложенная стратегия управления может значительно повысить эффективность использования топлива по сравнению с эталонными показателями. Здесь эталоном были стандартные методы управления взводом транспортных средств, такие как круиз-контроль с политикой пространственного разрыва (CC-SG) и круиз-контроль с политикой интервального интервала (CC-HG).
 На этом этапе ведущими транспортными средствами управляют водители, а следующие грузовики могут выполнять задачи вождения автоматически.Таким образом, водители следующих транспортных средств могут немного отдохнуть, путешествуя взводом. Чтобы у всех водителей была возможность расслабиться во время длительной поездки, необходимо учитывать последовательность, время перерывов и время в пути. Авторы указали, что затраты, связанные со временем, вероятно, будут более важными, чем затраты, связанные с топливом, в этой взводной форме. Второй уровень — гибридный взвод. Основное отличие состоит в том, что следующие грузовики на этом уровне могут быть без водителя. Тем не менее, водители по-прежнему требуются, когда грузовики едут в одиночку в первой и последней части своей поездки.В результате проблема самовывоза и доставки становится главным вопросом. Третий уровень — беспилотный взвод. Эта форма взвода включает полностью автоматизированные грузовики без водителей-людей. Беспилотный взвод может быть более гибким и эффективным, поскольку не требуется время на отдых даже в длительном путешествии.
На этом этапе ведущими транспортными средствами управляют водители, а следующие грузовики могут выполнять задачи вождения автоматически.Таким образом, водители следующих транспортных средств могут немного отдохнуть, путешествуя взводом. Чтобы у всех водителей была возможность расслабиться во время длительной поездки, необходимо учитывать последовательность, время перерывов и время в пути. Авторы указали, что затраты, связанные со временем, вероятно, будут более важными, чем затраты, связанные с топливом, в этой взводной форме. Второй уровень — гибридный взвод. Основное отличие состоит в том, что следующие грузовики на этом уровне могут быть без водителя. Тем не менее, водители по-прежнему требуются, когда грузовики едут в одиночку в первой и последней части своей поездки.В результате проблема самовывоза и доставки становится главным вопросом. Третий уровень — беспилотный взвод. Эта форма взвода включает полностью автоматизированные грузовики без водителей-людей. Беспилотный взвод может быть более гибким и эффективным, поскольку не требуется время на отдых даже в длительном путешествии. И это может быть полезно для экономии топлива, потому что грузовики могут ездить на разные остановки, чтобы сформировать взвод, а не возвращаться в фиксированное место, чтобы высадить водителей.
И это может быть полезно для экономии топлива, потому что грузовики могут ездить на разные остановки, чтобы сформировать взвод, а не возвращаться в фиксированное место, чтобы высадить водителей. А Алам и др. [23] обнаружили, что если бы транспортные средства передавали свою управляющую информацию по беспроводной связи, было бы разрешено расстояние в 2 метра без угрозы для безопасности. Однако, принимая во внимание реальные условия, возникают такие проблемы, как задержка обратной связи и задержка связи для обеспечения безопасности и комфорта пассажиров. Кроме того, что касается автономных взводов грузовиков, хотя вспомогательные ультразвуковые дальномеры и другие датчики применяются к автономным транспортным средствам для определения расстояния, работа на коротком расстоянии требует жесткого контроля, что может привести к увеличению усилий по управлению и огромным затратам на связь между транспортными средствами.Таким образом, необходимы дальнейшие исследования, чтобы выяснить разумные продольные промежутки между транспортными средствами во взводе, уравновешивая различные аспекты.
А Алам и др. [23] обнаружили, что если бы транспортные средства передавали свою управляющую информацию по беспроводной связи, было бы разрешено расстояние в 2 метра без угрозы для безопасности. Однако, принимая во внимание реальные условия, возникают такие проблемы, как задержка обратной связи и задержка связи для обеспечения безопасности и комфорта пассажиров. Кроме того, что касается автономных взводов грузовиков, хотя вспомогательные ультразвуковые дальномеры и другие датчики применяются к автономным транспортным средствам для определения расстояния, работа на коротком расстоянии требует жесткого контроля, что может привести к увеличению усилий по управлению и огромным затратам на связь между транспортными средствами.Таким образом, необходимы дальнейшие исследования, чтобы выяснить разумные продольные промежутки между транспортными средствами во взводе, уравновешивая различные аспекты. До сих пор большинство исследований проводилось в почти идеальных условиях или в конкретных моделях и предполагалось, что внешний транспорт не мешает движению грузовиков при следовании профилям скорости.Однако на самом деле трафик играет важную роль в решениях по координации, поскольку скорость и возможности догона могут снизиться при интенсивном движении, и это повлияет на потенциальную экономию топлива. Следовательно, представляет большой интерес изучение того, когда и как принимать координационное решение в динамической сети. Например, может быть неопределенно координировать точки слияния после района с интенсивным движением, в то время как план, который объединяет взвод перед районом с интенсивным движением, должен быть предпочтительным.Таким образом, прогнозирующее управление моделями на основе сценариев, а также стохастическая и надежная оптимизация могут стать соответствующими источниками вдохновения. Кроме того, из-за помех на дорогах транспортные средства могут быть не в состоянии выполнять планы скорости, предложенные системой координации, и новые задания могут добавляться на лету с течением времени.
До сих пор большинство исследований проводилось в почти идеальных условиях или в конкретных моделях и предполагалось, что внешний транспорт не мешает движению грузовиков при следовании профилям скорости.Однако на самом деле трафик играет важную роль в решениях по координации, поскольку скорость и возможности догона могут снизиться при интенсивном движении, и это повлияет на потенциальную экономию топлива. Следовательно, представляет большой интерес изучение того, когда и как принимать координационное решение в динамической сети. Например, может быть неопределенно координировать точки слияния после района с интенсивным движением, в то время как план, который объединяет взвод перед районом с интенсивным движением, должен быть предпочтительным.Таким образом, прогнозирующее управление моделями на основе сценариев, а также стохастическая и надежная оптимизация могут стать соответствующими источниками вдохновения. Кроме того, из-за помех на дорогах транспортные средства могут быть не в состоянии выполнять планы скорости, предложенные системой координации, и новые задания могут добавляться на лету с течением времени. Как следствие, для ослабления возмущений требуется обратная связь. Для задачи координации взвода грузовиков это означает повторение расчета планов на основе обновленной информации, подобно контроллеру с предсказанием модели [44].Кроме того, изменения профиля скорости и расхода топлива во взводе также необходимо исследовать при повторном планировании. Это может быть трудной проблемой для решения и будет предметом будущей работы.
Как следствие, для ослабления возмущений требуется обратная связь. Для задачи координации взвода грузовиков это означает повторение расчета планов на основе обновленной информации, подобно контроллеру с предсказанием модели [44].Кроме того, изменения профиля скорости и расхода топлива во взводе также необходимо исследовать при повторном планировании. Это может быть трудной проблемой для решения и будет предметом будущей работы. Причина в том, что из-за ошибок в оценке массы или максимально доступного крутящего момента двигателя некоторые HDV во взводе могут быть не в состоянии отслеживать рекомендуемый профиль скорости. И в результате взводы могут формироваться не самым выгодным образом. Эта проблема обсуждалась в работе [50], которая показала, что в таких условиях для грузового автомобиля наиболее экономичным является достижение желаемой максимальной или минимальной скорости до того, как он достигнет участка подъема или спуска соответственно.Тем не менее, для HDV, путешествующих взводом, по-прежнему неясно, как предпринять действия по экономии топлива в условиях неопределенностей в системах координации. Следовательно, дальнейшее исследование должно быть сосредоточено на более подробном анализе архитектуры управления, включая неопределенности системы и другие сопутствующие факторы, которые необходимо учитывать в реальности.
Причина в том, что из-за ошибок в оценке массы или максимально доступного крутящего момента двигателя некоторые HDV во взводе могут быть не в состоянии отслеживать рекомендуемый профиль скорости. И в результате взводы могут формироваться не самым выгодным образом. Эта проблема обсуждалась в работе [50], которая показала, что в таких условиях для грузового автомобиля наиболее экономичным является достижение желаемой максимальной или минимальной скорости до того, как он достигнет участка подъема или спуска соответственно.Тем не менее, для HDV, путешествующих взводом, по-прежнему неясно, как предпринять действия по экономии топлива в условиях неопределенностей в системах координации. Следовательно, дальнейшее исследование должно быть сосредоточено на более подробном анализе архитектуры управления, включая неопределенности системы и другие сопутствующие факторы, которые необходимо учитывать в реальности. Кроме того, из-за высокой сложности перемаршрутизации в большом количестве литературы делалось предположение, что маршруты не изменялись. Тем не менее, может быть более выгодно немного изменить маршруты движения, чтобы сформировать взвод. Кроме того, уменьшение сложности алгоритма также может уменьшить задержку в обработке данных. В результате исследователи должны изучить, как уменьшить сложность алгоритма и предложить более практичные методы координации транспортных средств, чтобы еще больше повысить эффективность использования топлива в грузовиках.
Кроме того, из-за высокой сложности перемаршрутизации в большом количестве литературы делалось предположение, что маршруты не изменялись. Тем не менее, может быть более выгодно немного изменить маршруты движения, чтобы сформировать взвод. Кроме того, уменьшение сложности алгоритма также может уменьшить задержку в обработке данных. В результате исследователи должны изучить, как уменьшить сложность алгоритма и предложить более практичные методы координации транспортных средств, чтобы еще больше повысить эффективность использования топлива в грузовиках. Что касается влияния на инфраструктуру, то длинные автопоезда, особенно длинные автоматизированные грузовые автопоезда, будут способствовать повышенному износу дорог из-за канального движения и чрезмерной концентрации пути колес относительно бокового положения [57, 58], что увеличивает стоимость жизненного цикла. Влияние взвода грузовиков на дорожную инфраструктуру уже привлекло внимание. Норванд и др. [57] провели моделирование характеристик дорожного покрытия и предложили выделенную полосу для автономных транспортных средств.Чен и др. [59] оценили глубину колейности и усталостное повреждение методом конечных элементов и предложили четыре режима бокового управления для автономных грузовиков. Результат показал, что боковое распределение автономных грузовиков оказывает значительное влияние на дорожную инфраструктуру, и автономные грузовики могут быть очень полезными для асфальтовых покрытий при надлежащем управлении [60].
Что касается влияния на инфраструктуру, то длинные автопоезда, особенно длинные автоматизированные грузовые автопоезда, будут способствовать повышенному износу дорог из-за канального движения и чрезмерной концентрации пути колес относительно бокового положения [57, 58], что увеличивает стоимость жизненного цикла. Влияние взвода грузовиков на дорожную инфраструктуру уже привлекло внимание. Норванд и др. [57] провели моделирование характеристик дорожного покрытия и предложили выделенную полосу для автономных транспортных средств.Чен и др. [59] оценили глубину колейности и усталостное повреждение методом конечных элементов и предложили четыре режима бокового управления для автономных грузовиков. Результат показал, что боковое распределение автономных грузовиков оказывает значительное влияние на дорожную инфраструктуру, и автономные грузовики могут быть очень полезными для асфальтовых покрытий при надлежащем управлении [60].
 Транспортное исследование, часть E: логистика
Транспортное исследование, часть E: логистика Публикации SAGE.
Публикации SAGE. Исследования в области экономики транспорта.
Исследования в области экономики транспорта. , Мишра, С., 2018. Прогнозирование внедрения подключенных автономных транспортных средств: новый подход, основанный на теории распространения
, Мишра, С., 2018. Прогнозирование внедрения подключенных автономных транспортных средств: новый подход, основанный на теории распространения

 , Биррелл С., 2019b. Подход с учетом человеческого фактора к определению требований к
, Биррелл С., 2019b. Подход с учетом человеческого фактора к определению требований к