Приёмник ГЛОНАСС с интерфейсом Bluetooth
Спутниковые системы навигации сегодня нужны всем. В связи с развитием отечественной системы ГЛОНАСС она активно используется наряду с такими зарубежными системами, как GPS. Но практически отсутствуют серийные образцы автономных приёмников сигналов ГЛОНАСС с интерфейсом Bluetooth. А они необходимы для планшетных компьютеров, в том числе с ОС Android. Это положение автор решил исправить, собрав такой приёмник из имеющихся в продаже готовых модулей.
Руководством для этой работы мне послужили различные материалы, опубликованные в Интернете. Например, в статье [1] я нашёл советы по выбору узлов и их компоновке. Функционально приёмник состоит из модуля приёмника сигналов спутников системы ГЛОНАСС, преобразователя его выходных сигналов для передачи по каналу Bluetooth и блока питания. Схема соединения модулей приёмника изображена на рис. 1.
Рис. 1. Схема соединения модулей приёмника
В качестве приёмника сигналов ГЛОНАСС (A2) использован готовый модуль на специализированной микросхеме MT3333 [2], имеющий следующие основные технические характеристики:
Число каналов приёма . . . . . . . . . . . . 99
. . . . . . . . . . . 99
Число каналов слежения . . . . . . . . . . 33
Чувствительность, дБм . . . . . . . . . . – 165
Напряжение питания, В . . . . . . . . . . 3…6
Потребляемый ток, мА, не более:
в режиме поиска . . . . . . . . . . . . . 35
в режиме слежения . . . . . . . . . . . 29
Длительность «холодного» старта, с, не более . . . . . . . . . . . . . 33
Длительность «горячего» старта, с, не более . . . . . . . . . . . . . . 1
Размеры, мм . . . . . . . . . . . . . . . 25×31×5
В режиме поиска на модуле мигает светодиод. Тот модуль, что показан на рис. 2, имеет встроенную антенну. Но существуют его варианты и без антенны, а лишь с разъёмом для её подключения. В этом случае нужно приобрести и подключить к этому разъёму внешнюю антенну. Оба варианта одинаковы по параметрам и назначению выводов и способны принимать сигналы как со спутников системы ГЛОНАСС, так и со спутников системы GPS. Наличиепоказанногона схеме штриховыми линиями резервного элемента питания G1 (это может быть литиевый элемент CR2032) не обязательно.![]() Но его установка ускоряет повторный запуск модуля A2 после перерыва в подаче основного питания, позволяя сохранятьинформацию о спутниках, полученную в предыдущем сеансе работы.
Но его установка ускоряет повторный запуск модуля A2 после перерыва в подаче основного питания, позволяя сохранятьинформацию о спутниках, полученную в предыдущем сеансе работы.
Рис. 2. Модуль приёмника
Рис. 3. Bluetooth-адаптер HC05
Принятая навигационная информация поступает по последовательному интерфейсу в изображённый на рис. 3 Bluetooth-адаптер HC05 [3]. Его основные технические характеристики:
Протокол Bluetooth . . . . . . . . . 2.0 + EDR
Рабочий диапазон, ГГц . . . . . . . . . . . 2,4
Модуляция . . . . . . . . . . . . . . . . . . . . GFSK
Мощность излучения, дБм, не более . . . . . . . . . . . . . . . . . . . . . . . 4
Чувствительность при BER не более 0,1 %, дБм . . . . . . . . . . . – 84
Напряжение питания, В . . . . . . . . . . . 3,3
Потребляемый ток, мА . . . . . . . . . . . . 50
Частота мигания светодиода, Гц:
идёт поиск . . . . . . . . . . . . . . . . . . . . 5
связь установлена . . . . . . . . . . . 0,5
. . . . . . . . . . 0,5
Рабочая температура, оС . . . . –20…+75
Размеры, мм . . . . . . . . . . . . 26,9×13×2,2
Пароль для связи с компьютером . . . . . . . . . . . . . . . . . . . . . . 1234
Источник питания состоит из литийионного аккумулятора G2 с устройством A1 (рис. 4) для его зарядки от USB-разъёма компьютера или зарядного устройства с таким разъёмом и изображённого на рис. 5 стабилизированного преобразователя напряжения аккумулятора в 3,3 В [4]. Именно такое напряжение используется для питания модуля приёмника ГЛОНАСС и адаптера Bluetooth.
Рис. 4. Источник питания
Рис. 5. Стабилизированный преобразователь напряжения аккумулятора
Модуль зарядки имеет следующие параметры:
Входной разъём . . . . . . . . . . . microUSB
Входное напряжение, В . . . . . . . . . . . . 5
Максимальный зарядный ток, А . . . . . . . . . . . . . . . . . . . . . . . . . . 1
Напряжение отсечки зарядки, В . . . . . . . . . . . . . . . . . . . . . . . . . 4,2
. . . . . . . . . . . . . . . . . . . . . . . . 4,2
Порог срабатывания защиты от переразрядки, В . . . . . . . . . . . . 2,5
Порог срабатывания защиты по току нагрузки, А . . . . . . . . . . . . . . 3
Размеры, мм . . . . . . . . . . . . . . . 26×17×3
Красный светодиод сигнализирует об идущем процессе зарядки, зелёный — о полной заряженности аккумулятора.
Стабилизированный преобразователь напряжения на микросхеме LM2596 имеет следующие характеристики:
Входное напряжение, В . . . . . . . . 3…40
Выходное напряжение, В . . . . . . 1,5…35
Максимальный выходной ток, А . . . . . . . . . . . . . . . . . . . . . . . . . . 3
КПД, %, не более . . . . . . . . . . . . . . . . . 92
Размах пульсаций выходного напряжения, мВ, не более . . . . . . . . . . . . . . . . . . . . . . . . 30
Частота преобразования, кГц . . . . . . 150
Рабочая температура, оC . . . . –45…+85
Размеры, мм . . . . . . . . . . . . . . 43×21×10
Индикатор работы — синий светодиод.
Все модули устройства размещены в герметичном пластиковом корпусе размерами 115×55×65 мм, как показано на рис. 6, и соединены между собой согласно схеме отсутствующими на фотоснимке монтажными проводами. Оставшиеся в корпусе пустоты заполнены пенополиэтиленовыми вставками.
Рис. 6. Размещение модулей
Правильно собранное устройство обычно работоспособно сразу после включения питания. Необходимо лишь до подключения модулей A2 и A3 установить напряжение 3,3 В на выходе модуля A4 имеющимся в нём подстроечным резистором.
По сравнению с распространёнными GPS-Bluetooth приёмниками мы получаем высокочувствительный приёмник сигналов со спутников ГЛОНАСС и GPS, что положительно сказывается на точности определения координат.
Передача информации по каналу Bluetooth от приёмника к планшетному компьютеру с ОС Android была проверена с помощью бесплатных программ Bluetooth GPS Provider (URL: https:// apkplz.com/casual/bluetooth-gpsprovider-apk-download (27.03. 17)) и Bluetooth GPS for Android (URL: https:// downloads.sourceforge.net/project/ bluegps4droid/Apk/BlueGPS4Droid_ 1.2.x/BlueGps4Droid_1.2.6.apk (27.03.17)).
17)) и Bluetooth GPS for Android (URL: https:// downloads.sourceforge.net/project/ bluegps4droid/Apk/BlueGPS4Droid_ 1.2.x/BlueGps4Droid_1.2.6.apk (27.03.17)).
Запустив программу Bluetooth GPS Provider, необходимо в правом верхнем углу экрана отметить строку Preferen ces, затем выбрать источник сигналов. В нашем случае это HC05. Нажав на клавишу Start, получим свои координаты и информацию о наблюдаемых нави-гационных спутниках с указанием мощности принимаемых от них сигналов. При запуске программы Bluetooth GPS for Android необходимо выбрать источник навигационных сигналов HC05. Получив информацию со спутников, программа отобразит текущие координаты. Сменив экран Main на экран Status (для этого нужно сместиться вправо), получим схематичное изображение небесной сферы с положением на ней спутников, их номерами и мощностью сигнала. Сместившись ещё на один экран вправо (на экран NMEA), можно просмотреть служебные сообщения о принимаемых навигационных сигналах.
Литература
1. GPS Bluetooth своими руками. — URL: http://kibermaster.net/gps-bluetooth-svoimirukami/ (27.03.17).
GPS Bluetooth своими руками. — URL: http://kibermaster.net/gps-bluetooth-svoimirukami/ (27.03.17).
2. MT3333. A high-performance, single-chip, multi-GNSS solution with the industry’s highest level of sensitivity, accuracy and Time to First Fix. — URL: http://www.mediatek.com/products/ locationIntelligence/mt3333 (27.03.17).
3. Использование блютуз-модулей HC- 05/06. — URL: http://sotvorimvmeste.ru/ viewtopic.php?p=768 (27.03.17).
4. Про модули DC-DC Buck Converter на LM2596. — URL: http://trengtor.blogspot.ru/ 2015/06/buck-step-down-lm2596.html (27.03.17).
Автор: М. Наумов, г. Москва
GPS приемники, закладки, GPS маяки
Каждый владелец авто желает получать подробную информацию о местонахождении своей машины и точно знать, где находится автомобиль. Сегодня эта мечта стала реальностью благодаря появлению таких устройств, как GPS маяки для авто и автомобильные трекеры. В настоящее время они очень популярны среди автолюбителей, а все потому, что данные приборы быстро и точно находят машину и передают ее координаты либо на мобильный, либо на сервер мониторинга в глобальной сети. Наша компания осуществляет продажу автомобильных GPS трекеров и маяков по выгодным расценкам. Мы торгуем только качественной продукцией брендов, которые хорошо зарекомендовали себя на рынке.
Наша компания осуществляет продажу автомобильных GPS трекеров и маяков по выгодным расценкам. Мы торгуем только качественной продукцией брендов, которые хорошо зарекомендовали себя на рынке.
Достоинств у GPS трекеров масса. Самое главное, что они мало весят и обладают небольшим размером, потому их очень просто спрятать. Также GPS трекеры именуются контроллерами и позволяют отслеживать автомобиль либо иной объект. В трекере имеется приемник GPS, с помощью которого он определяет собственные координаты. Удобно, что посредством трекера можно следить за передвижением авто. Купить GPS трекер можно в нашей компании. Также мы осуществляем продажу GSM систем охраны для автомобилей, включая GSM системы Elita.
Кроме автотрекеров, мы предлагаем gsm модуль starline. Данные приборы, аналогично трекерам, предназначаются для дистанционного отслеживания автомобиля либо другого движущегося объекта. Однако имеются и отличия от трекера. Во-первых, в маяке нет проводов подключения. Во-вторых, маяк можно установить в любое место и сделать это самостоятельно, без помощи профессионалов. В-третьих, маяк функционирует автономно на протяжении длительного периода. Наконец, имеется спящий режим маяка, который препятствует нахождению прибора специальными устройствами.
Во-вторых, маяк можно установить в любое место и сделать это самостоятельно, без помощи профессионалов. В-третьих, маяк функционирует автономно на протяжении длительного периода. Наконец, имеется спящий режим маяка, который препятствует нахождению прибора специальными устройствами.
GPS закладки, маяки и трекеры – это отличное решение для автолюбителя, так как все эти приборы стоят сравнительно недорого и наделены множеством плюсов. Купите у нас GPS маяк и не волнуйтесь за сохранность самого дорогого!
GPS Tracker на ардуино своими руками
После нескольких экспериментов с ардуиной решил сделать простенький и не очень дорогой GPS-tracker с отправкой координат по GPRS на сервер.
Используется Arduino Mega 2560 (Arduino Uno), SIM900 — GSM/GPRS модуль (для отправки информации на сервер), GPS приёмник SKM53 GPS.
Всё закуплено на ebay.com, в сумме около 1500 р (примерно 500р ардуина, немного меньше — GSM модуль, немного больше — GPS).
GPS приемник
Для начала нужно разобраться с работой с GPS. Выбранный модуль — один из самых дешевых и простых. Тем не менее, производитель обещает наличие батарейки для сохранения данных о спутниках. По даташиту, холодный старт должен занимать 36 секунд, однако, в моих условиях (10 этаж с подоконника, вплотную зданий нет) это заняло аж 20 минут. Следующий старт, однако, уже 2 минуты.
Важный параметр устройств, подключаемых к ардуине — энергопотребление. Если перегрузить преобразователь ардуины, она может сгореть. Для используемого приемника максимальное энергопотребление — 45mA @ 3.3v. Зачем в спецификации указывать силу тока на напряжении, отличном от требуемого (5V), для меня загадка. Тем не менее, 45 mA преобразователь ардуины выдержит.
Подключение
GPS не управляемый, хотя и имеет RX пин. Для чего — неизвестно. Основное, что можно делать с этим приемником — читать данные по протоколу NMEA с TX пина. Уровни — 5V, как раз для ардуины, скорость — 9600 бод. Подключаю VIN в VCC ардуины, GND в GND, TX в RX соответствующего serial. Читаю данные сначала вручную, затем с использованием библиотеки TinyGPS. На удивление, всё читается. После перехода на Uno пришлось использовать SoftwareSerial, и тут начались проблемы — теряется часть символов сообщения. Это не очень критично, так как TinyGPS отсекает невалидные сообщения, но довольно неприятно: о частоте в 1Гц можно забыть.
Подключаю VIN в VCC ардуины, GND в GND, TX в RX соответствующего serial. Читаю данные сначала вручную, затем с использованием библиотеки TinyGPS. На удивление, всё читается. После перехода на Uno пришлось использовать SoftwareSerial, и тут начались проблемы — теряется часть символов сообщения. Это не очень критично, так как TinyGPS отсекает невалидные сообщения, но довольно неприятно: о частоте в 1Гц можно забыть.
Небольшое замечание относительно SoftwareSerial: на Uno нет хардверных портов, поэтому приходится использовать программный. Так вот, он может принимать данные только на пине, на котором плата поддерживает прерывания. В случае Uno это 2 и 3. Мало того, данные одновременно может получать только один такой порт.
Вот так выглядит «тестовый стенд».
GSM приемник/передатчик
Теперь начинается более интересная часть. GSM модуль — SIM900. Он поддерживает GSM и GPRS. Ни EDGE, ни уж тем более 3G, не поддерживаются. Для передачи данных о координатах это, вероятно, хорошо — не будет задержек и проблем при переключении между режимами, плюс GPRS сейчас есть почти везде.
Подключение
Модуль управляется также по последовательному порту, с тем же уровнем — 5V. И здесь нам уже понадобятся и RX, и TX. Модуль — shield, то есть, он устанавливается на ардуину. Причем совместим как с mega, так и с uno. Скорость по умолчанию — 115200.
Собираем на Mega, и тут нас ждет первый неприятный сюрприз: TX пин модуля попадает на 7й пин меги. На 7м пину меги недоступны прерывания, а значит, придется соединить 7й пин, скажем, с 6м, на котором прерывания возможны. Таким образом, потратим один пин ардуины впустую. Ну, для меги это не очень страшно — всё-таки пинов хватает. А вот для Uno это уже сложнее (напоминаю, там всего 2 пина, поддерживающих прерывания — 2 и 3). В качестве решения этой проблемы можно предложить не устанавливать модуль на ардуину, а соединить его проводами. Тогда можно использовать Serial1.
После подключения пытаемся «поговорить» с модулем (не забываем его включить). Выбираем скорость порта — 115200, при этом хорошо, если все встроенные последовательные порты (4 на меге, 1 на uno) и все программные работают на одной скорости. Так можно добиться более устойчивой передачи данных. Почему — не знаю, хотя и догадываюсь.
Выбираем скорость порта — 115200, при этом хорошо, если все встроенные последовательные порты (4 на меге, 1 на uno) и все программные работают на одной скорости. Так можно добиться более устойчивой передачи данных. Почему — не знаю, хотя и догадываюсь.
Итак, пишем примитивный код для проброса данных между последовательными портами, отправляем atz, в ответ тишина. Что такое? А, case sensitive. ATZ, получаем OK. Ура, модуль нас слышит. А не позвонить ли нам ради интереса? ATD +7499… Звонит городской телефон, из ардуины идет дымок, ноутбук вырубается. Сгорел преобразователь Arduino. Было плохой идеей кормить его 19 вольтами, хотя и написано, что он может работать от 6 до 20V, рекомендуют 7-12V. В даташите на GSM модуль нигде не сказано о потребляемой мощности под нагрузкой. Ну что ж, Mega отправляется в склад запчастей. С замиранием сердца включаю ноутбук, получивший +19V по +5V линии от USB. Работает, и даже USB не выгорели. Спасибо Lenovo за защиту.
После выгорания преобразователя я поискал потребляемый ток. Так вот, пиковый — 2А, типичный — 0.5А. Такое явно не под силу преобразователю ардуины. Нужно отдельное питание.
Так вот, пиковый — 2А, типичный — 0.5А. Такое явно не под силу преобразователю ардуины. Нужно отдельное питание.
Программирование
Модуль предоставляет широкие возможности передачи данных. Начиная от голосовых вызовов и SMS и заканчивая, собственно, GPRS. Причем для последнего есть возможность выполнить HTTP запрос при помощи AT команд. Придется отправить несколько, но это того стоит: формировать запрос вручную не очень-то хочется. Есть пара нюансов с открытием канала передачи данных по GPRS — помните классические AT+CGDCONT=1,«IP»,«apn»? Так вот, тут то же самое нужно, но слегка хитрее.
Для получения страницы по определенному URL нужно послать следующие команды:
AT+SAPBR=1,1 //Открыть несущую (Carrier)
AT+SAPBR=3,1,"CONTYPE","GPRS" //тип подключения - GPRS
AT+SAPBR=3,1,"APN","internet" //APN, для Мегафона - internet
AT+HTTPINIT //Инициализировать HTTP
AT+HTTPPARA="CID",1 //Carrier ID для использования.
AT+HTTPPARA="URL","http://www.example.com/GpsTracking/record. php?Lat=%ld&Lng=%ld" //Собственно URL, после sprintf с координатами
AT+HTTPACTION=0 //Запросить данные методом GET
//дождаться ответа
AT+HTTPTERM //остановить HTTP
php?Lat=%ld&Lng=%ld" //Собственно URL, после sprintf с координатами
AT+HTTPACTION=0 //Запросить данные методом GET
//дождаться ответа
AT+HTTPTERM //остановить HTTP
 php?Lat=%ld&Lng=%ld" //Собственно URL, после sprintf с координатами
AT+HTTPACTION=0 //Запросить данные методом GET
//дождаться ответа
AT+HTTPTERM //остановить HTTP
php?Lat=%ld&Lng=%ld" //Собственно URL, после sprintf с координатами
AT+HTTPACTION=0 //Запросить данные методом GET
//дождаться ответа
AT+HTTPTERM //остановить HTTP
В результате, при наличии соединения, получим ответ от сервера. То есть, фактически, мы уже умеем отправлять данные о координатах, если сервер принимает их по GET.
Питание
Поскольку питать GSM модуль от преобразователя Arduino, как я выяснил, плохая идея, было решено купить преобразователь 12v->5v, 3A, на том же ebay. Однако, модулю не нравится питание в 5в. Идем на хак: подключаем 5в в пин, с которого приходит 5в от ардуины. Тогда встроенный преобразователь модуля (существенно мощнее преобразователя ардуины, MIC 29302WU) сделает из 5в то, что нужно модулю.
Сервер
Сервер написал примитивный — хранение координат и рисование на Яндекс.картах. В дальнейшем возможно добавление разных фич, включая поддержку многих пользователей, статус «на охране/не на охране», состояние систем автомобиля (зажигание, фары и пр. ), возможно даже управление системами автомобиля. Конечно, с соответствующей поддержкой трекера, плавно превращающегося в полновесную сигнализацию.
), возможно даже управление системами автомобиля. Конечно, с соответствующей поддержкой трекера, плавно превращающегося в полновесную сигнализацию.
Полевые испытания
Вот так выглядит собранный девайс, без корпуса:
После установки преобразователя питания и укладывания в корпус от дохлого DSL модема система выглядит так:
Припаивал провода, вынул несколько контактов из колодок ардуины. Выглядят так:
Подключил 12В в машине, проехался по Москве, получил трек:
Трек получается рваным. Причина в том, что отправка данных по GPRS занимает относительно много времени, и в это время координаты не считываются. Это явная ошибка программирования. Лечится во-первых, отправкой сразу пачки координат со временем, во-вторых, асинхронной работой с GPRS модулем.
Время поиска спутников на пассажирском сидении автомобиля — пара минут.
Выводы
Создание GPS трекера на ардуино своими руками возможно, хотя и не является тривиальной задачей. Главный вопрос сейчас — как спрятать устройство в машине так, чтобы оно не подвергалось воздействиям вредных факторов (вода, температура), не было закрыто металлом (GPS и GPRS будут экранироваться) и не было особенно заметно. Пока просто лежит в салоне и подключается к гнезду прикуривателя.
Главный вопрос сейчас — как спрятать устройство в машине так, чтобы оно не подвергалось воздействиям вредных факторов (вода, температура), не было закрыто металлом (GPS и GPRS будут экранироваться) и не было особенно заметно. Пока просто лежит в салоне и подключается к гнезду прикуривателя.
Ну и ещё нужно поправить код для более плавного трека, хотя основную задачу трекер и так выполняет.
Использованные устройства
- Arduino Mega 2560 [compatible]
- Arduino Uno [compatible]
- GPS SkyLab SKM53
- SIM900 based GSM/GPRS Shield
- DC-DC 12v->5v 3A converter
Литература
- Оф. сайт Arduino (содержит подробную информацию и о платах, и об их программировании)
- TinyGPS (ссылка на скачивание в середине страницы)
- GPS SKM53 Datasheet
- Описание GSM/GPRS Shield на SIM900
- SIM900 AT Commands
- Документация по Яндекс.Картам
Код
Публикующийся код может быть использован в любых разрешенных законом целях любыми лицами. Качество кода ужасно, поскольку это, всё же, тестовый вариант. Когда допишу до чего-то более красивого, обновлю.
Качество кода ужасно, поскольку это, всё же, тестовый вариант. Когда допишу до чего-то более красивого, обновлю.
Для компиляции кода для ардуино нужно импортировать библиотеку tinygps.
Архив с кодом
Автор: gurux13
Источник
Система ГЛОНАСС, GPS: на службе геодезии
Современные инженерные изыскания невозможно представить без высокоточного оборудования. В том числе и спутниковой связи, которую обеспечивают система ГЛОНАСС и её американский аналог — GPS. Обе они работают по схожему принципу. Для геодезии, кадастровых и топографических нужд они дают высокую степень точности, возможность сбора данных даже на сложных географических участках, сокращают время, затрачиваемое на геодезическую съёмку.
Идея использования спутников в навигации и картографии зародилась ещё в советское время. Но по-настоящему полноценные системы ведут свой отчёт с конца 1970-х годов. Первый из двадцати четырёх спутников, положивших начало сети GPS (Global Positioning System) был запущен военными американцами в 1978-м.![]() Число «24» — оптимальное количество орбитальных объектов для того, чтобы перекрыть всю земную поверхность.
Число «24» — оптимальное количество орбитальных объектов для того, чтобы перекрыть всю земную поверхность.
Приёмников, записывающих данные со спутников, на поверхности земли можно расположить любое количество. Некоторые из них простые, устанавливаются в навигаторы автомашин, иные очень сложные, высокоточные, предназначенные для работы с данными в геодезии и других ответственных областях.
Приёмник позволяет своему владельцу круглосуточно получать координаты, точную дату и время отправки сообщений, расстояние до передатчика. Имея данные трёх спутников, приёмник легко рассчитывает координаты точки, в которой находится: широту, долготу. Присоединив четвёртый спутник — выдаёт высоту над уровнем моря. Поскольку и спутники, и приёмники двигаются, окончательные данные складываются из вычислительной работы приёмника и наземного центра. Эта упрощённая схема даёт представление, как функционирует то, что неофициально уже стали называть — Эра ГЛОНАСС.
Между ГЛОНАСС и Джипиэс есть некоторые отличия технического характера.![]() Так, американская система нуждается в корректировке данных о нашей территории. Зато считается, что её срок эксплуатации длиннее, чем у приборов российского аналога.
Так, американская система нуждается в корректировке данных о нашей территории. Зато считается, что её срок эксплуатации длиннее, чем у приборов российского аналога.
Геодезическая работа и спутники
Поскольку системы схожи по своему действию и выполняют одни и те же функции, будем говорить о них как о едином целом. Изначально предназначенные для нужд армии, эти устройства ныне используются в навигации, а в последние годы — в строительстве, инженерных изысканиях и даже сельском хозяйстве. Кадастровые инженеры всё чаще пользуются ею для межевания.
GPS и ГЛОНАСС в геодезии
Глобальные системы способны значительно облегчить и убыстрить работу кадастрового инженера или геодезиста. Вот лишь небольшой перечень задач, с которыми они способны справиться:
- вычисления при реконструкции или установке опорных сетей;
- топографическая съёмка на значительной территории;
- моделирование проектов на натуре;
- межевание, определение границ земельных наделов;
- привязка измерений к государственной геосети.

Проводится статическая и кинематическая съёмки. Первая необходима при фиксации точных координат установки опорных сетей, вторая — топографических схем. В движении проводится межевание земель с определением поворотных точек, разбивочные работы для вынесения на ландшафт ключевых проектных отметок и осей готового проекта. При этом данные обрабатываются в реальном временном отрезке.
Положительные и отрицательные стороны ГЛОНАСС
Используя приёмники, работающие со спутниковой системой, при проведении геодезических работ, мы получаем ряд преимуществ:
- быстроту измерительных операций;
- простоту вычислений;
- почти идеальную точность;
- возможность вычислений для точек в непрямой видимости;
- независимость от метеоусловий.
Самыми существенными недостатками можно назвать чувствительность к близким к антенне препятствиям, сбой при воздействии электромагнитного поля. Не всегда просто установить антенну, если нужная точка находится в угловой части дома, на уровне его цоколя или ниже, на фундаменте. Из-за этого использовать только джипиэс при проведении кадастровых работ непрактично. Они используются в комплексе с другим геодезическим оборудованием, в частности, с электронными тахеометрами.
Из-за этого использовать только джипиэс при проведении кадастровых работ непрактично. Они используются в комплексе с другим геодезическим оборудованием, в частности, с электронными тахеометрами.
Фотограмметрия и Джипиэс
Превосходно справляется приёмник GPS, когда надо провести сгущение геосети на территории, для которой готовится карта, привязать локальную систему координат к глобальному объекту, провести съёмки земельного участка или фотограмметрические работы (привязка форм, размеров и расположения объектов на местности по их фотографическим изображениям).
Возможности фотограмметрии значительно расширились за счёт совершенствования приёмников GPS для самолётов. Задача перед конструкторами стояла непростая: нужно было «научить» прибор определять точное угловое положение летящего объекта в пространстве. Ныне съёмка осуществляется так:
- самолёт двигается по заданному маршруту;
- прибор фиксирует момент вхождения в заданную координатную точку;
- навигация передаёт сигнал на аэрофотокамеру;
- срабатывает затвор;
- прибор передаёт цифровые снимки в память бортового компьютера.

В дальнейшем все полученные данные обрабатываются также, как обычная кинематическая съёмка. Снимки привязываются к контрольным точкам, выставленным по границам исследуемой территории. Сейчас такой метод применяется для кадастровой съёмки во многих районах, где до сих пор не было кадастровых планов и карт.
При межевании земельных участков и проведении геодезических работ ГЛОНАСС и GPS становятся незаменимыми. Они дают значительные преимущества в скорости проведения изысканий, мобильности и возможности удалённой съёмки.
Заключение
Конечно, чем легче просматривается местность, тем проще использовать технологии спутниковой съёмки для установления координат и границ. На свободной местности можно установить приёмник на автомобиль или иной транспорт и включить кинематическую съёмку. Для особой точности возможно замерять координаты точек с частотой в одну секунду или фиксируя каждый сантиметр поверхности. При таких условиях, эффективность кадастровых работ будет максимально высокой.
Использование спутниковых систем, таких как ГЛОНАСС или GPS, позволяет развивать принципиально новое направление в геодезии. Вероятнее всего, вскоре появятся и другие подобные методы изучения земной поверхности. Но на современном этапе, возможности систем далеко не исчерпаны. Они лишь начинают развиваться, позволяя строителям, проектировщикам, инженерам и картографам работать быстро, качественно и результативно.
Создание системы GPS — SparkFun Electronics
Благодаря усилиям блестящих инженеров и ученых GPS (Global Positioning System) сегодня является краеугольным камнем технологии в нашем мире. Будь то навигационная система нашего автомобиля или портативное устройство во время прогулки по лесу, теперь мы можем точно определить нашу точную широту и долготу по спутникам, вращающимся вокруг Земли. Довольно сумасшедший, не так ли? Пойдемте с нами и узнайте, что это такое, как это работает и как вы можете создать свою собственную систему GPS.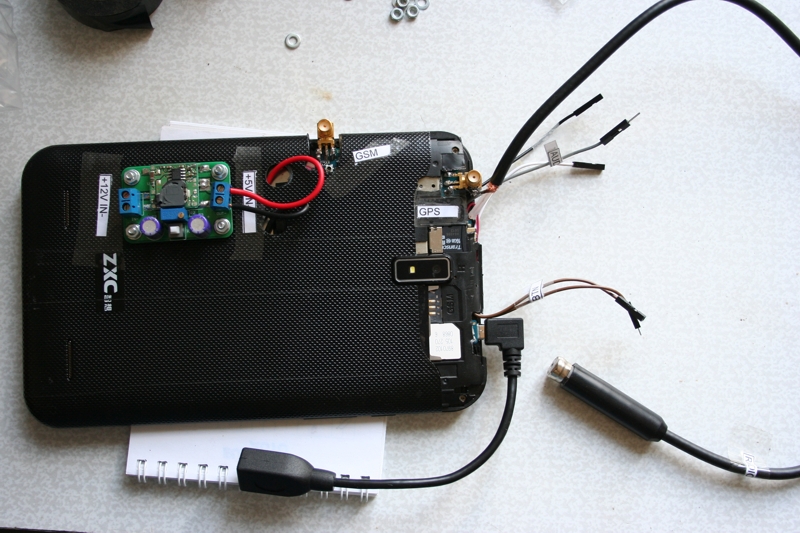
Узнайте об истории GPS, о том, как он работает и как он стал неотъемлемой технологией в современном мире.
Как работает GPS?
На средней околоземной орбите (12 550 миль) в любой момент времени работает примерно 31 спутник. Это относительно большая система, работающая с тщательным планированием и калибровкой. Основная идея — математика. Ждать! Позвольте мне закончить. Ваш приемник точно определяет местоположение, вычисляя расстояние между вами и этим спутником.Это делается путем умножения скорости сигнала (скорости света) на время атомных часов на спутнике. Вы можете получить свое местоположение с трех спутников, но это будет не так точно — четыре спутника необходимы для определения вашего местоположения в трех измерениях. Три спутника необходимы для координат x, y и z, и один спутник для определения времени прохождения сигнала от спутников до приемника (см. изображения ниже).
изображения ниже).
Для определения точного местоположения необходимы четыре спутника: оси X, Y и Z и показания часов.
Спутниковые технологии
Хорошо, круто. Итак, спутники летают вокруг, выдавая данные о местоположении, и если я нахожусь в пределах прямой видимости, мой приемник сообщит мне мое местоположение. Это оно? Нет, не совсем. Мы только что сделали небольшой шаг в сторону технологии GPS в целом. Мы установили, что есть две ключевые части, спутники и приемники, так что теперь давайте посмотрим поближе. Приемник обычно представляет собой микросхему, которая может принимать электромагнитные волны и преобразовывать их в читаемые данные.Эти системы могут варьироваться от отдельного чипа до коммутационной платы и сложной пользовательской системы, например, в автомобиле. Если вы создаете проект, основанный на этих типах технологий, вам необходимо понимать три основные функции, необходимые для их работы. Для модуля GPS вам понадобится антенна, интегрированная система для выполнения математических операций и передачи данных, а также выход протокола связи, который передается пользователю или конечной системе.
Для модуля GPS вам понадобится антенна, интегрированная система для выполнения математических операций и передачи данных, а также выход протокола связи, который передается пользователю или конечной системе.
Антенна
Любая система беспроводной связи будет оснащена всемогущей антенной.Короче говоря, мы ищем проводящий металл, при попадании на который электромагнитных волн внутри проводника будет протекать электрический ток. Подумайте о том, чтобы плескаться в бассейне и смотреть, как волны плещутся по воде. Этот ток течет особым образом, управляемый электромагнитной волной. Существует целая инженерная дисциплина, посвященная изготовлению антенн, так что не будем углубляться. Но это важный компонент для следующей части системы.
Интегрированная система
Для этой части нет точного стандарта, но нам нужна электроника, чтобы отфильтровывать нежелательные частоты волн и считывать те, которые нас интересуют. Эти системы могут быть сложными, как в случае с GPS-RTK, или простыми для обычного GPS. Базовым рецептом будет фильтр, декодер сигналов и некоторый коммуникационный выход. Мы используем различные чипы, и у каждого есть свои преимущества и недостатки. Так как же мы общаемся с этими чипами?
Эти системы могут быть сложными, как в случае с GPS-RTK, или простыми для обычного GPS. Базовым рецептом будет фильтр, декодер сигналов и некоторый коммуникационный выход. Мы используем различные чипы, и у каждого есть свои преимущества и недостатки. Так как же мы общаемся с этими чипами?
Протоколы связи
Предположим, вы слышали или имеете некоторый опыт использования распространенных методов связи между электронными устройствами, таких как последовательный порт, I2C, SPI и т. д.Это аппаратные методы связи между компьютерами, но у GPS есть дополнительный уровень. Как мы можем объяснить, что многие спутники летают вокруг, выплевывая свои собственные языки? Мы вводим протоколы связи GPS, что является просто причудливым способом стандартизации. Знакомьтесь со стандартом NMEA-0183: он разбивает сигналы на предложения.
Когда сигнал декодируется в этот стандарт, некогда электромагнитная волна становится понятной для человека. Бросьте его на линии связи, и наш компьютер может показать нам наше местоположение.
Бросьте его на линии связи, и наш компьютер может показать нам наше местоположение.
Если вы хотите узнать больше о GPS, посетите нашу страницу Основы GPS ниже.
Основы GPS
14 декабря 2012 г.
Глобальная система позиционирования (GPS) — это чудо инженерной мысли, к которому у всех нас есть доступ по относительно низкой цене и без абонентской платы. С правильным оборудованием и минимальными усилиями вы можете определить свое местоположение и время практически в любой точке земного шара.
Поиск вашего первого местоположения
Теперь, когда мы рассмотрели основы работы с GPS, пришло время приступить к делу. Мы собрали несколько простых учебных пособий, чтобы познакомить вас с аппаратным обеспечением и программированием, необходимыми для создания вашего первого проекта GPS.
Обязательно ознакомьтесь с нашими руководствами по подключению!
При обучении использованию оборудования GPS одним из лучших способов обучения является просмотр руководств по подключению.Для каждого продукта SparkFun у нас есть соответствующее руководство по подключению на страницах продукта, расположенных под описанием. Мы делаем все возможное, чтобы пройтись по всем необходимым соединениям, связанным библиотекам и одной или двум рабочим демонстрациям, чтобы запустить ваш проект.
Повышение точности и аккуратности
Благодаря технологическим достижениям в области GPS-приемников мы можем достичь точности определения местоположения до одного сантиметра и даже сохранять азимут при слабом сигнале или его отсутствии.
Кинематика в реальном времени (RTK)
GPS-приемники, поддерживающие RTK, принимают обычные сигналы от глобальных навигационных спутниковых систем (GNSS) вместе с корректирующим потоком для достижения точности позиционирования в 1 см. Вдобавок к этим сигналам приемник RTK принимает поток поправок RTCM, а затем вычисляет ваше местоположение с точностью до 1 см в режиме реального времени. Скорость варьируется между приемниками, но большинство из них выдает решение не реже одного раза в секунду; некоторые приемники могут выводить это высокоточное решение до 20 раз в секунду.Узнайте больше о RTK в нашем учебном пособии Что такое GPS RTK.
Вдобавок к этим сигналам приемник RTK принимает поток поправок RTCM, а затем вычисляет ваше местоположение с точностью до 1 см в режиме реального времени. Скорость варьируется между приемниками, но большинство из них выдает решение не реже одного раза в секунду; некоторые приемники могут выводить это высокоточное решение до 20 раз в секунду.Узнайте больше о RTK в нашем учебном пособии Что такое GPS RTK.
Мертвая расплата
Навигация по густонаселенному городу, короткому туннелю или гаражу может привести к ухудшению качества сигнала или полной его потере. Эти проблемы можно решить с помощью расчетов; процесс определения текущего положения путем объединения ранее определенных данных о местоположении со скоростью и курсом. Трехмерные инерциальные измерительные устройства (IMU) и данные о расстоянии до транспортного средства (например, количество шагов колес и одометры) можно использовать для непрерывного расчета текущего положения транспортного средства, когда данные GNSS на мгновение перестают работать. Счисление мертвых может быть достигнуто с нашей коммутационной платой GPS Dead Reckoning NEO-M8U.
Счисление мертвых может быть достигнуто с нашей коммутационной платой GPS Dead Reckoning NEO-M8U.
Лучшее из обоих миров
Объединение кинематики в реальном времени и счисления пути раньше было задачей, для которой требовалось специальное оборудование на тысячи долларов. К счастью, технологии продвинулись до такой степени, что достижение невероятной точности без привязки стало гораздо более доступным. SparkFun производит две платы (GPS-RTK Dead Reckoning Breakout и GPS-RTK Dead Reckoning pHAT для Raspberry Pi), чтобы делать именно это.Эти платы потребуют значительной работы конечного пользователя для настройки и калибровки, поскольку они предназначены для профессионального применения.
Товары
Как и любая другая технология, GPS-оборудование поставляется в различных формах и размерах, чтобы соответствовать конкретным потребностям вашего проекта. Ниже мы перечислили несколько наших любимых коммутационных плат, антенн и модулей.
Ниже мы перечислили несколько наших любимых коммутационных плат, антенн и модулей.
Наш творческий технолог Роб знакомит нас с различными типами GPS-оборудования
и предоставляет информацию, которая поможет вам построить систему, подходящую именно вам.
См. наше Руководство по покупке GPS
Разделительные платы GPS:
ПлатыGPS оснащены приемником и могут взаимодействовать с вашими любимыми платами для разработки, такими как SparkFun RedBoard Qwiic.
Посмотреть все разделительные доски GPS
Антенны:
Для некоторых проектов требуется антенна для лучшего приема сигналов со спутников. Ниже приведены некоторые из наших любимых.
Ниже приведены некоторые из наших любимых.
Интерфейсный кабель SMA-U.FL
В наличии WRL-09145Это 4-дюймовый соединительный кабель, который соединяет RF-разъемы U.FL с обычными разъемами SMA. Этот кабель обычно используется для кон…
3Посмотреть все Антенны GPS
Модули:
GPS-модулиявляются приемниками сигналов.Эти модули поставляются без разделительной платы, поэтому взаимодействие с этими модулями может усложнить проект.
Посмотреть все GPS-модули
Дополнительные проекты
Вот еще несколько проектов, использующих GPS. Мы всегда стараемся расширить нашу библиотеку проектов и руководств, поэтому заходите почаще или заполните форму выше, чтобы получать уведомления о новом контенте.
Мы всегда стараемся расширить нашу библиотеку проектов и руководств, поэтому заходите почаще или заполните форму выше, чтобы получать уведомления о новом контенте.
GPS-часы Qwiic
14 сентября 2020 г.
Который сейчас час? Вам пора… Qwiic-ly создает часы GPS и выводит их на дисплей! Этот проект предоставляет вам текущую дату и время, используя спутники GPS. Прочитайте дату и время как цифровые или аналоговые часы. Или даже настройте часы на военное время, свой часовой пояс или автоматически переведите время на летнее время!
Руководство для начинающих по RFID
15 июня 2020 г.
В этом уроке мы вернемся к некоторым основам RFID и попрактикуемся, создав регистратор удаленной работы, используя считыватель RFID и модуль GPS. Вы отсканируете карту и получите идентификатор, место и время. Все идеальные данные для ввода и вывода из ниоткуда!
Вы отсканируете карту и получите идентификатор, место и время. Все идеальные данные для ввода и вывода из ниоткуда!
Дифференциальный векторный указатель GPS
31 мая 2016 г.
Используйте GPS, чтобы два объекта, база и цель, были направлены друг на друга. Это можно использовать для наведения направленной антенны (или, в случае этого проекта, лазера) с одного объекта на другой объект на расстоянии, которое ограничено только вашей способностью предоставить базовой станции GPS-местоположение цели.
Как создать свой собственный приемник GPS
Этот сайт может получать партнерские комиссионные от ссылок на этой странице. Условия эксплуатации. Для хакера лучший способ понять, как работает система, — это разбить ее на составные части, провести чертовски много исследований, а затем перестроить ее с нуля. Эндрю Холм, британский аппаратный хакер, построил свою собственную телефонную станцию, память на магнитных сердечниках, аппаратный захват Ethernet-пакетов, а теперь, надев медную корону, свой собственный GPS-приемник.
Эндрю Холм, британский аппаратный хакер, построил свою собственную телефонную станцию, память на магнитных сердечниках, аппаратный захват Ethernet-пакетов, а теперь, надев медную корону, свой собственный GPS-приемник.
Глобальная система позиционирования очень проста в своей работе. В любой момент времени вокруг Земли постоянно вращается от 24 до 32 спутников GPS. Они вращаются в шести различных плоскостях, по крайней мере, с четырьмя спутниками в каждой плоскости (см. Ниже). Если вы помните школьное упрощение того, как электроны вращаются вокруг ядра атома, спутники GPS вращаются вокруг Земли очень похожим образом.Так или иначе, в результате шесть спутников находятся в пределах прямой видимости практически из каждой точки на земле, а для получения GPS-привязки вам нужен хороший сигнал всего от четырех. Чтобы вычислить ваше положение, каждый спутник GPS постоянно передает свои эфемеридные данные (свое местоположение) и время. Ваш GPS-приемник использует эти данные для триангуляции вашего местоположения.
Теперь… создать свой собственный GPS-приемник так же «просто», как получить и демультиплексировать четыре сигнала GPS, но не позволяйте приведенному выше изображению обмануть вас: существует плата Xilinx FPGA dev, которая выполняет обработку сигналов в реальном времени. t, а ПК с Windows выполняет контролирующую роль, выбирая исправные спутники, анализируя полученные данные и т. д.Холму пришлось самому паять печатную плату, программировать ПЛИС и разрабатывать программное обеспечение контроллера ПК. Конечным результатом, однако, является система, которая может определить местонахождение и измерить мощность сигнала каждого видимого спутника в небе и обеспечить привязку GPS за 2,5 секунды; лучше, чем ваш смартфон или TomTom, скорее всего.
Будучи настоящим хакером, Холм сделал доступными все принципиальные схемы и исходный код, необходимые для создания собственного GPS-приемника. Общая стоимость деталей не указана, но она составит не менее нескольких сотен долларов, если только у вас не завалялся кеш с битами. Тем не менее, это определенно та вещь, которую вы могли бы построить, обладая некоторыми элементарными знаниями в области электронной техники.
Тем не менее, это определенно та вещь, которую вы могли бы построить, обладая некоторыми элементарными знаниями в области электронной техники.
И, наконец, добавим суп незаконных шалостей: каждое коммерческое устройство GPS должно быть ограничено в работе на высоте более 60 000 футов и на скорости более 1000 узлов, чтобы вы не могли создавать свои собственные межконтинентальные баллистические ракеты, что на самом деле является основным цель GPS, созданной Министерством обороны США. Самодельный GPS-приемник Холма не имеет таких ограничений…
Узнайте больше на веб-сайте Эндрю Холма, посмотрите другие его аппаратные лайфхаки или о GPS в Википедии
GPS-приемник на базе ПК | Полная электроника DIY Project
Сегодня существует множество гаджетов с технологией GPS.GPS расшифровывается как «глобальная система позиционирования». Она предоставляет данные, соответствующие положению самого приемника GPS на основе международных стандартов широты и долготы, в дополнение к стандартному всемирному координированному времени (UTC), а также некоторую дополнительную информацию, полученную от ближайший спутник, назначенный для этой цели. (UTC является основным стандартом времени, по которому мир регулирует часы и время.)
(UTC является основным стандартом времени, по которому мир регулирует часы и время.)
Здесь представлен GPS-приемник на базе ПК, который позволяет вам определять местоположение места, а также показывает стандартное время на вашем ПК.Это может быть полезно в отдаленных районах, где нет других беспроводных сетей для мобильных устройств и Интернета. Приемник GPS также полезен для исследований и других сложных приложений.
Описание цепи
Система состоит из ПК, приемника GPS, который собирает данные со спутника, и интерфейсной схемы для отправки данных на ПК через последовательный порт.
Рис. 1: Блок-схема GPS-приемника на базе ПК. 2: Схема GPS-приемника на базе ПКРис. 3: GPS-модуль Единственная задействованная схема — это последовательное соединение между ПК и GPS-модулем.Блок-схема GPS-приемника на базе ПК показана на рис. 1. Все, что вам нужно, это последовательный кабель, схема драйвера MAX232 и блок питания. Полная схема показана на рис. 2. Системе требуется 5 В, а также 3,3 В постоянного тока — 5 В для MAX232 и 3,3 В для модуля GPS.
GPS-модуль
Мы использовали GPS-модуль iWave (см. рис. 3) с внешней антенной. Для этого модуля требуется питание 3,3 В постоянного тока.
Основная работа системы основана на декодировании протокола NMEA.GPS-модуль iWave использует NMEA-0183, который является частью протокола NMEA. Этот протокол включает в себя набор сообщений, которые используют набор символов ASCII и имеют определенный формат. Эти сообщения непрерывно отправляются модулем GPS на сопряженное устройство. Каждое сообщение начинается с «$» (шестнадцатеричный 0x24) и заканчивается (шестнадцатеричный 0x0D 0x0A).
Эти сообщения включают GGA, GGL, GSA, GSV, RMC, VTG и ZDA. Здесь вам не нужно знать обо всех этих сообщениях. Вам нужна только строка сообщения GGA, которая представляет время, положение и фиксированные данные для этого приложения.Эта строка имеет формат вроде:
.$GPGGA, 002153.000, 3342.6618, N, 11751.3858, W, 1.2, 27.0, M, -34.2, M,, 0000*5E
, где каждое поле, разделенное запятой (,), представляет определенную информацию. Мы использовали только пять из этих полей для отображения времени, широты, широты-направления, долготы и долготы-направления, которые являются вторым, третьим, пятым, четвертым и шестым полями соответственно.
Мы использовали только пять из этих полей для отображения времени, широты, широты-направления, долготы и долготы-направления, которые являются вторым, третьим, пятым, четвертым и шестым полями соответственно.
Программное обеспечение преобразования положения было разработано с использованием языка программирования высокого уровня.По сути, это настольное приложение .NET (Windows Form), настроенное таким образом, чтобы оно могло работать на любом ПК с .NET framework 3.5 или более поздней версии. Код написан на языке C# .NET и скомпилирован на платформе .NET в среде Microsoft Visual Studio 2010. Скриншот вывода программы показан на рис. 4.
Рис. 4: Программный вывод GPS-приемника на базе ПК Приемник GPS получает данные о широте и долготе со спутника. Эти данные предоставляют вам точное положение приемника на поверхности Земли в режиме реального времени.С информацией о широте и долготе вы можете просмотреть местоположение на стандартной карте. Полученные данные о широте и долготе также можно ввести в любое бесплатное программное обеспечение, такое как itouchmap, доступное по адресу http://itouchmap.com/latlong.html, где можно просмотреть точную точку местоположения на Земле. Вы также можете получить карту на сайте www.mapsofworld.com/lat_long/india-lat-long.html
Полученные данные о широте и долготе также можно ввести в любое бесплатное программное обеспечение, такое как itouchmap, доступное по адресу http://itouchmap.com/latlong.html, где можно просмотреть точную точку местоположения на Земле. Вы также можете получить карту на сайте www.mapsofworld.com/lat_long/india-lat-long.html
Строительство и испытания
На рис.5 и компоновка его компонентов на рис. 6.
Рис. 5: Односторонняя печатная плата для GPS-приемника на базе ПКРис. 6: Компоновка компонентов для печатной платы Загрузите PDF-файлы с компоновкой печатных плат и компонентов: нажмите здесь Загрузить исходный код: нажмите здесь Эта часть относительно проще и удобна для пользователя, поскольку программное обеспечение предоставляет все шаги, необходимые для выполнения, в простом пользовательском интерфейсе. Когда вы подключаете адаптер 9В к цепи, LED1 светится, указывая на наличие источника питания в цепи. Подождите некоторое время, скажем, 5-10 минут, для инициализации модуля GPS. После инициализации вы можете запустить программное обеспечение, чтобы начать получать данные.
Подождите некоторое время, скажем, 5-10 минут, для инициализации модуля GPS. После инициализации вы можете запустить программное обеспечение, чтобы начать получать данные.
Шаги следующие:
- Откройте исполняемый файл (.exe), созданный сразу после компиляции кода C#. На экране появится окно «Отображение GPS» (см. рис. 4).
- Выберите последовательный COM-порт, щелкнув стрелку.
- В раскрывающемся меню выберите COM-порт, к которому вы подключили модуль GPS.
Если все в порядке, вы получите широту и долготу прямо на экране вашего ПК. В противном случае выключите и снова включите цепь, подождите некоторое время и повторите вышеуказанные шаги.
Когда у вас на экране появятся координаты, вы можете взять карту мира и найти это место самостоятельно. Если вы хотите увидеть точное стандартное время, обратитесь к времени, полученному в этом приложении, которое полностью зависит от спутниковой навигации.
Автор учится на третьем курсе комплексного двудипломного курса по электронике и технике связи в ИИТ, Рурки.
Статья впервые опубликована 26 октября 2015 г. и обновлена 28 апреля 2020 г.
Основная концепция GPS-приемника и его компонентов
Основные компоненты GPS-приемника показаны на рис. 10. Это:
— Антенна с предусилителем
— ВЧ-секция с идентификацией сигналов и обработкой сигналов
— Микропроцессор для управления приемником, выборки данных и обработки данных
— Прецизионный осциллятор
— Блок питания
— Пользовательский интерфейс, панель управления и дисплея
— Память, хранилище данных
- Рисунок 10: Основные компоненты GPS-приемника
Антенна
Чувствительная антенна приемника GPS обнаруживает сигнал электромагнитной волны, передаваемый спутниками GPS, и преобразует энергию волны в электрический ток, усиливает мощность сигнала и отправляет его на электронику приемника.
Несколько типов используемых GPS-антенн в основном относятся к следующим типам (рис.
Монополюсная спираль Спиральная спираль Микрополосковое дроссельное кольцо
Рисунок 11: Типы антенн GPS
Монополюсная спираль Спиральная спираль Микрополосковое дроссельное кольцо
Рисунок 11: Типы антенн GPS
— Монополюс или диполь
— Четырехзаходная спираль (волюта)
— Спиральная спираль
— Микрополоска (патч)
— Дроссельное кольцо
Микрополосковые антенныиспользуются чаще всего из-за их дополнительных преимуществ для бортового применения, материализации приемника GPS и простоты конструкции.Однако для геодезических нужд антенны рассчитаны на прием обеих несущих частот L1 и L2. Кроме того, они защищены от многолучевости дополнительными заземляющими пластинами или дроссельными кольцами. Дроссельное кольцо состоит из полосок проводника, концентричных с вертикальной осью антенны и соединенных с заземляющей пластиной, что, в свою очередь, уменьшает эффект многолучевости.
ВЧ-секция с идентификацией и обработкой сигналов
Входящие сигналы GPS преобразуются с понижением частоты в более низкую частоту в секции RS и обрабатываются в одном или нескольких каналах. Канал приемника является основным электронным блоком приемника GPS. Приемник может иметь один или несколько каналов. В концепции параллельного канала каждый канал непрерывно франкирует один конкретный спутник. Для определения положения и времени требуется минимум четыре параллельных канала. Современные приемники содержат до 12 каналов для каждой частоты.
Канал приемника является основным электронным блоком приемника GPS. Приемник может иметь один или несколько каналов. В концепции параллельного канала каждый канал непрерывно франкирует один конкретный спутник. Для определения положения и времени требуется минимум четыре параллельных канала. Современные приемники содержат до 12 каналов для каждой частоты.
В концепции последовательного канала канал переключается со спутника на спутник через регулярные промежутки времени. Одноканальному приемнику требуется не менее четырех раз по 30 секунд для определения первого положения, хотя некоторые типы приемников имеют выделенный канал для считывания сигнала данных.В настоящее время в большинстве случаев используются каналы быстрой последовательности со скоростью переключения около одной секунды на спутник.
В канале мультиплексирования последовательность на очень высокой скорости между различными спутниками достигается с использованием одной или обеих частот. Скорость переключения синхронна с навигационным сообщением 50 бит/с или 20 миллисекунд на бит. Полная последовательность с четырьмя спутниками завершается через 20 миллисекунд или через 40 миллисекунд для двухчастотных приемников. Навигационное сообщение является непрерывным, поэтому первое исправление достигается примерно через 30 секунд.
Полная последовательность с четырьмя спутниками завершается через 20 миллисекунд или через 40 миллисекунд для двухчастотных приемников. Навигационное сообщение является непрерывным, поэтому первое исправление достигается примерно через 30 секунд.
Хотя параллельные каналы с непрерывным отслеживанием дешевы и обеспечивают хорошую общую производительность, приемники GPS, основанные на технологии мультиплексирования, вскоре будут доступны по более низкой цене из-за электронного бума.
Микропроцессор
Для управления работой приемника GPS необходим микропроцессор для приема сигналов, обработки сигнала и декодирования широковещательного сообщения. Также требуются дополнительные возможности вычисления положения и скорости в реальном времени, преобразования в заданные местные данные или определения информации о путевых точках.В будущем все больше и больше релевантного пользователю программного обеспечения будет размещаться на миниатюрных микросхемах памяти.
Прецизионный осциллятор
Опорная частота в приемнике генерируется прецизионным генератором. Обычно в приемниках используется менее дорогой кварцевый генератор с низкой производительностью, поскольку точная информация о часах получается со спутников GPS, а ошибка часов пользователя может быть устранена с помощью метода двойной разности, когда все участвующие приемники наблюдают точно в одну и ту же эпоху.Для навигации с двумя или тремя спутниками используется только внешний высокоточный генератор.
Обычно в приемниках используется менее дорогой кварцевый генератор с низкой производительностью, поскольку точная информация о часах получается со спутников GPS, а ошибка часов пользователя может быть устранена с помощью метода двойной разности, когда все участвующие приемники наблюдают точно в одну и ту же эпоху.Для навигации с двумя или тремя спутниками используется только внешний высокоточный генератор.
Источник питания
Приемники GPS первого поколения потребляли очень много энергии, но современные приемники спроектированы таким образом, чтобы потреблять как можно меньше энергии. Большинство приемников имеют внутреннюю перезаряжаемую никель-кадмиевую батарею в дополнение к внешнему источнику питания. Предупреждение о низком заряде батареи побуждает пользователя обеспечить надлежащее расположение источника питания.
Емкость памяти
Для обработки портов все данные должны храниться во внутренней или внешней памяти.Постобработка необходима для многостанционных методов, применимых к геодезическим и геодезическим задачам.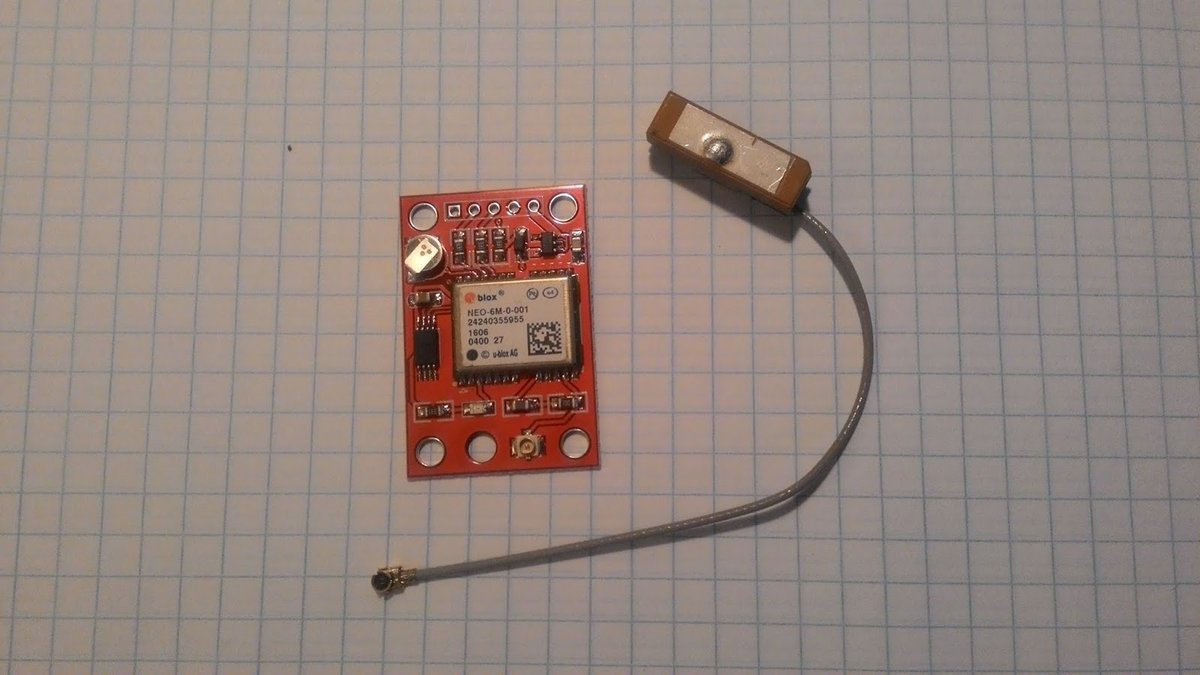 GPS-наблюдения для псевдодальности, фазовые данные, время и данные навигационных сообщений должны быть записаны. Основываясь на частоте дискретизации, она составляет около 1,5 Мбайт данных в час для шести спутников и 1 секунду данных для двухчастотных приемников. Современные приемники имеют внутреннюю память объемом 5 Мбайт и более. Некоторые приемники сохраняют данные на магнитной ленте или на дискете или жестком диске, используя внешний микрокомпьютер, подключенный через порт RS-232.
GPS-наблюдения для псевдодальности, фазовые данные, время и данные навигационных сообщений должны быть записаны. Основываясь на частоте дискретизации, она составляет около 1,5 Мбайт данных в час для шести спутников и 1 секунду данных для двухчастотных приемников. Современные приемники имеют внутреннюю память объемом 5 Мбайт и более. Некоторые приемники сохраняют данные на магнитной ленте или на дискете или жестком диске, используя внешний микрокомпьютер, подключенный через порт RS-232.
Большинство современных приемников имеют клавиатуру и дисплей для связи между пользователем и приемниками. Клавиатура используется для ввода команд, внешних данных, таких как номер станции или высота антенны, или для выбора операции меню. На дисплее отображаются вычисленные координаты, видимые спутники, индексы качества данных и другая подходящая информация. Текущие пакеты программного обеспечения управляются с помощью меню и очень удобны для пользователя.
Классификация приемников GPS
Приемники GPS можно разделить на различные группы по разным критериям. На ранних этапах в качестве критериев классификации использовались две основные технологии, а именно. Технология приемника кодовой корреляции и технология приемника последовательности, которые были эквивалентны зависимым от кода приемникам и приемникам без кода. Однако такое разделение больше не является оправданным, поскольку в существующих приемниках реализованы оба метода.
На ранних этапах в качестве критериев классификации использовались две основные технологии, а именно. Технология приемника кодовой корреляции и технология приемника последовательности, которые были эквивалентны зависимым от кода приемникам и приемникам без кода. Однако такое разделение больше не является оправданным, поскольку в существующих приемниках реализованы оба метода.
Другая классификация приемников GPS основана на сборе типов данных, т.е.
— Приемник кода C/A
— Код C/A + L1 Несущая фаза
— Код C/A + Фаза несущей L1 + Фаза несущей L2
— Несущая фаза L1 (не очень часто)
— L1, L2 Несущая фаза (используется редко)
В зависимости от технической реализации канала приемники GPS можно классифицировать как:
— Многоканальный приемник
— Последовательный приемник
— Мультиплексный приемник
ПриемникиGPS даже классифицируются по назначению как:
— Военный приемник
— Гражданский приемник
— Навигационный приемник
— Приемник времени
— Геодезический приемник
Для геодезических приложений важно использовать данные фазы несущей как наблюдаемые. Использование частоты L1 и L2 также необходимо вместе с P-кодом.
Использование частоты L1 и L2 также необходимо вместе с P-кодом.
Примеры GPS-приемника
Рынок GPS-приемниковразвивается и расширяется с очень высокой скоростью. Приемники становятся мощными, дешевыми и компактными. Невозможно дать подробную информацию о каждой модели, но приведенное описание некоторых типовых приемников можно рассматривать как основу для оценки будущего поиска и изучения приемников GPS.
Классические приемники
Подробное описание зависимого от кода GPS-навигатора T1 4100 и свободного от кода макрометра V1000 приведено здесь:
GPS-навигаторT1 4100 был произведен компанией Texas Instruments в 1984 году.Это был первый приемник GPS, обеспечивающий наблюдения в коде C/A и P, а также наблюдения фазы несущей L1 и L2. Это приемник с двухчастотным мультиплексированием, который подходит для геодезистов, геодезистов и навигаторов. Наблюдаемые через него:
— псевдодиапазоны P-кода на L1 и L2
— Псевдодиапазоны C/A-Code на L1
— Несущая фаза на L1 и L2
Данные записываются внешним магнитофоном на цифровые кассеты или загружаются непосредственно во внешний микропроцессор. Ручной дисплей управления (CDU) используется для связи между наблюдателем и приемником. Для навигационных целей встроенный микропроцессор обеспечивает положение и скорость в режиме реального времени каждые три секунды. Т1 4100 представляет собой крупногабаритный прибор весом около 33 кг и может быть упакован в два транспортировочных кейса. Потребляет 90 Вт энергии в режиме работы 22В — 32В. Рекомендуется использовать генератор. Шум наблюдения в P-коде составляет от 0,6 до 1 м, в коде C/A он находится в диапазоне от 6 до 10 м, а для фазы несущей — от 2 до 3 м.
Ручной дисплей управления (CDU) используется для связи между наблюдателем и приемником. Для навигационных целей встроенный микропроцессор обеспечивает положение и скорость в режиме реального времени каждые три секунды. Т1 4100 представляет собой крупногабаритный прибор весом около 33 кг и может быть упакован в два транспортировочных кейса. Потребляет 90 Вт энергии в режиме работы 22В — 32В. Рекомендуется использовать генератор. Шум наблюдения в P-коде составляет от 0,6 до 1 м, в коде C/A он находится в диапазоне от 6 до 10 м, а для фазы несущей — от 2 до 3 м.
T1 4100 широко использовался в многочисленных научных и прикладных проектах GPS и используется до сих пор. Основные недостатки T1 4100 по сравнению с более современным оборудованием GPS:
.— Громоздкий размер оборудования
— Высокое энергопотребление
— Сложная операционная процедура
— Ограничение отслеживания четырех спутников одновременно
— Высокий уровень шума при измерении фазы
Чувствительность его антенны к многолучевости и изменению фазового центра при подключении двух приемников к одной антенне и одновременном слежении за семью спутниками. Для больших расстояний и в научных проектах T1 4100 по-прежнему считается полезным. Однако из-за наложения ограничения на P-код для гражданских лиц, T1 4100 во время активации Anti Spoofing (AS) может использоваться только как одночастотный приемник кода C/A.
Для больших расстояний и в научных проектах T1 4100 по-прежнему считается полезным. Однако из-за наложения ограничения на P-код для гражданских лиц, T1 4100 во время активации Anti Spoofing (AS) может использоваться только как одночастотный приемник кода C/A.
MACROMETER V 1000, GPS-приемник без кода, был представлен в 1982 году и стал первым приемником для геодезических приложений. Точные результаты, полученные с его помощью, продемонстрировали потенциал очень точных фазовых наблюдений GPS. Это одночастотный приемник, который отслеживает 6 спутников по 6 параллельным каналам.Полная система состоит из трех блоков, а именно.
— Приемник и регистратор с блоком питания
— Антенна с большой пластиной заземления
— процессор P 1000
Процессор необходим для предоставления данных альманаха, поскольку Macrometer V 1000 не может декодировать спутниковые сообщения и обрабатывать данные. В заранее определенные периоды времени измеряются разности фаз между принятым сигналом несущей и опорным сигналом от генератора приемника. Типичная базовая точность, сообщаемая для расстояния до 100 км, составляет от 1 до 2 частей на миллион (частей на миллион).
Типичная базовая точность, сообщаемая для расстояния до 100 км, составляет от 1 до 2 частей на миллион (частей на миллион).
Macrometer II, двухчастотная версия, была представлена в 1985 году. Хотя он сравним с Macrometer V 1000, его энергопотребление и вес намного меньше. Обе системы требуют внешних эфемерид. Следовательно, его могут использовать специализированные операторы немногих компаний, и требуется синхронизировать часы всех приборов, которые предполагается использовать для конкретного сеанса наблюдения. Чтобы преодолеть вышеуказанные недостатки, двухчастотный Macrometer II был дополнительно уменьшен и объединен с одночастотным приемником кода C / A с торговой маркой MINIMAC в 1986 году, таким образом, он стал приемником, зависящим от кода.
Примеры существующих геодезических GPS-приемников
Описаны некоторые из доступных в настоящее время приемников GPS, которые используются в геодезической съемке и точной навигации. Почти все модели начинались как одночастотные приемники C/A-Code с четырьмя каналами.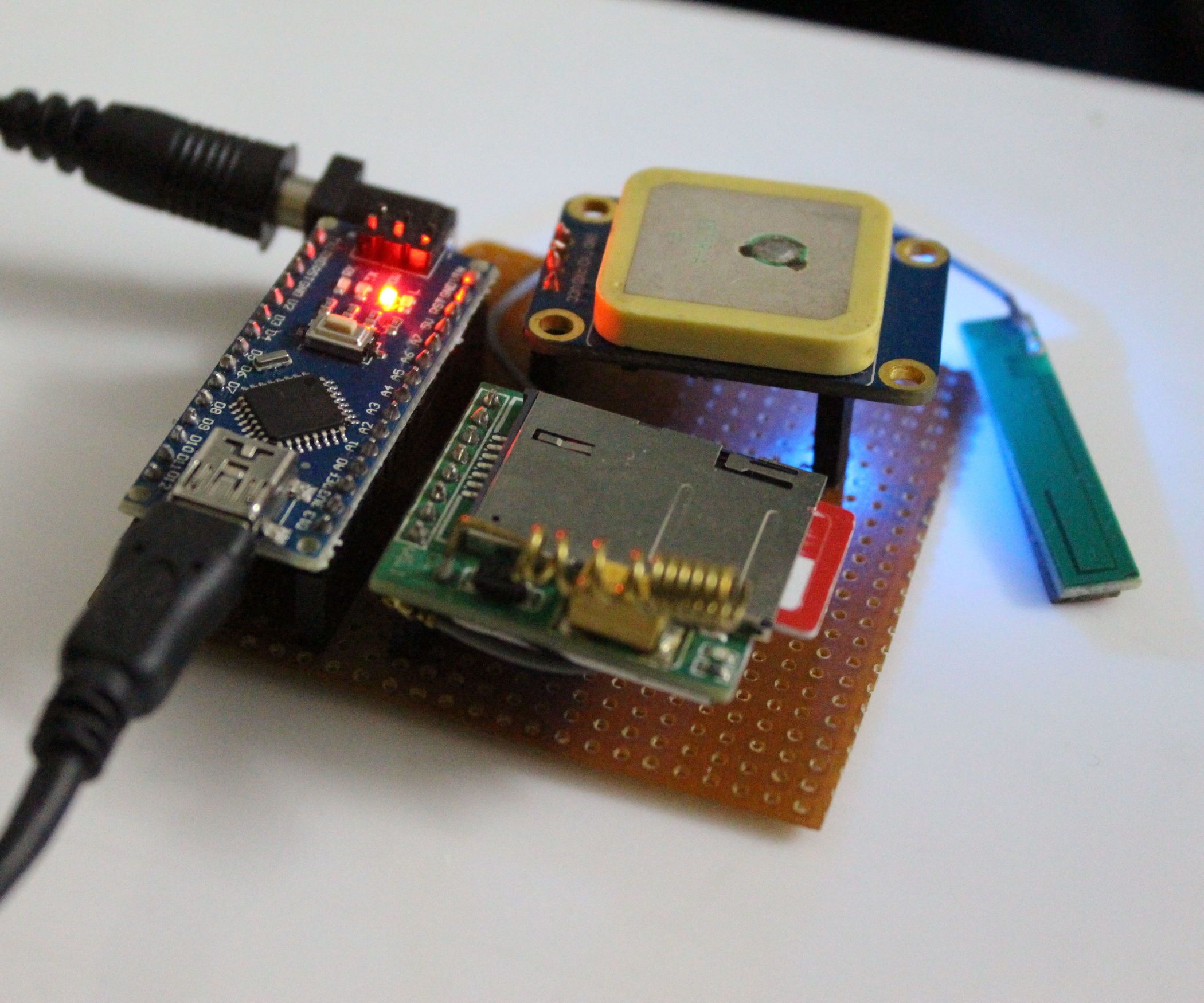 Позже была добавлена фаза несущей L2 и увеличена возможность отслеживания. В настоящее время все ведущие производители перешли на технологию L2 без кода и без последовательности. В 1986 году компании WILD/LEITZ (Хеербруг, Швейцария) и MAGNAVOX (Торранс, Калифорния) совместно разработали геодезический приемник WM 101.Это четырехканальный приемник кода L1 C/A. Три канала последовательно отслеживают до шести спутников, а четвертый канал, обслуживающий каналы, собирает спутниковые сообщения и периодически калибрует межканальные смещения. C/A-код и реконструированные данные фазы несущей L1 наблюдаются один раз в секунду.
Позже была добавлена фаза несущей L2 и увеличена возможность отслеживания. В настоящее время все ведущие производители перешли на технологию L2 без кода и без последовательности. В 1986 году компании WILD/LEITZ (Хеербруг, Швейцария) и MAGNAVOX (Торранс, Калифорния) совместно разработали геодезический приемник WM 101.Это четырехканальный приемник кода L1 C/A. Три канала последовательно отслеживают до шести спутников, а четвертый канал, обслуживающий каналы, собирает спутниковые сообщения и периодически калибрует межканальные смещения. C/A-код и реконструированные данные фазы несущей L1 наблюдаются один раз в секунду.
Двухчастотный WM 102 был выпущен на рынок в 1988 году со следующими основными характеристиками:
— Прием L1 с семью каналами кода C/A, отслеживающими до шести спутников одновременно.
— Прием L2 до шести спутников с одним каналом последовательного P-кода
— Модифицированный метод последовательности для получения L2, когда сигналы P-кода зашифрованы.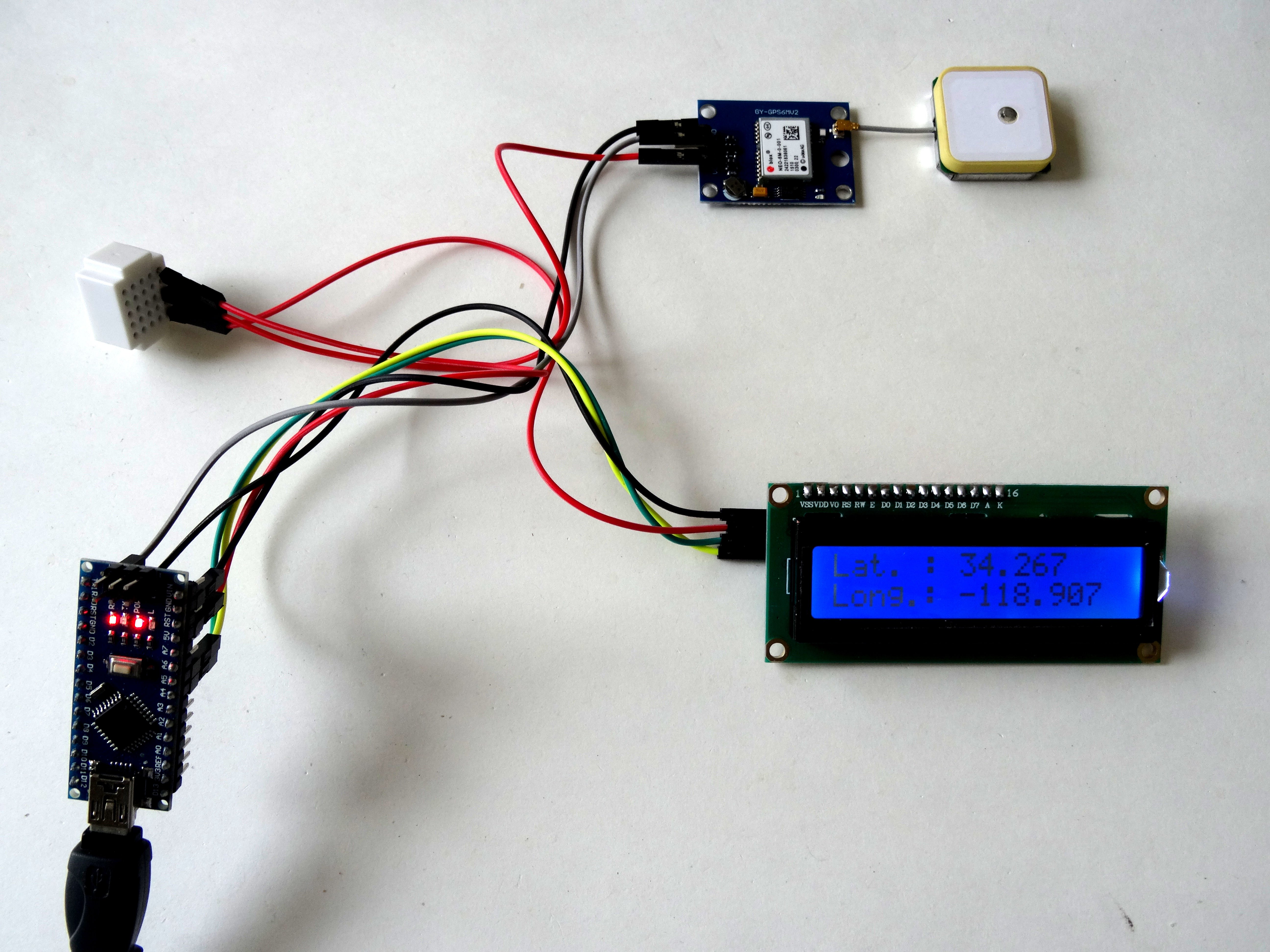
Наблюдения могут быть записаны на встроенные кассеты данных или могут быть переданы в режиме онлайн на внешний регистратор данных через интерфейс RS 232 или RS 422. Связь между оператором и приемником устанавливается с помощью буквенно-числовой панели управления и дисплея. WM 101/102 имеет большое разнообразие встроенных в приемник опций, управляемых меню, и сопровождается комплексным программным обеспечением для постобработки.
В 1991 году была представлена система WILD GPS 200. Аппаратное обеспечение состоит из двухчастотного GPS-датчика Magnavox SR 299, ручного GPS-контроллера CR 233 и батареи Nicd. Подключаемые карты памяти обеспечивают носитель записи. Он может отслеживать 9 спутников одновременно на L1 и L2. Восстановление фазы несущей на L1 осуществляется с помощью C/A-кода, а на L2 — с помощью P-кода. Приемник автоматически переключается на бескодовый L2, когда P-код зашифрован. Он потребляет 8,5 Вт через 12-вольтовый блок питания.
TRIMBLE NAVIGATION (Санни-Вейл, Калифорния) производит TRIMBLE серии 4000 с 1985 года. Приемник первого поколения представлял собой приемник кода L1 C/A с пятью параллельными каналами, обеспечивающий одновременное отслеживание 5 спутников. Дальнейшая модернизация включала увеличение количества каналов до двенадцати, возможность секвенирования L2 и возможность P-кода. TRIMBLE Geodatic Surveyor 4000 SSE — самая совершенная модель. Когда P-код доступен, он может выполнять следующие типы наблюдений, а именно.,
Приемник первого поколения представлял собой приемник кода L1 C/A с пятью параллельными каналами, обеспечивающий одновременное отслеживание 5 спутников. Дальнейшая модернизация включала увеличение количества каналов до двенадцати, возможность секвенирования L2 и возможность P-кода. TRIMBLE Geodatic Surveyor 4000 SSE — самая совершенная модель. Когда P-код доступен, он может выполнять следующие типы наблюдений, а именно.,
— Измерения фазы L1 и L2 полного цикла
— L1 и L2, измерения P-кода, когда AS включен и P-код зашифрован
— Полный цикл измерения фаз L1 и L2
— Взаимно коррелированные данные Y-кода
Шум наблюдения при измерении фазы несущей, когда доступен P-код, составляет около n 0–2 мм, а псевдодальность P-кода составляет всего n 2 см. Следовательно, он очень подходит для методов быстрого разрешения неоднозначности с помощью комбинаций код/несущая.
Компания ASHTECH (Саннивейл, Калифорния) разработала GPS-приемник с 12 параллельными каналами и стала пионером современной многоканальной технологии. GPS-приемник ASHTECH XII был представлен в 1988 году. Он способен измерять псевдодальности, фазу несущей и интегрированный доплеровский доплеровский сигнал до 12 спутников на L1. Измерение псевдодальностей сглажено с помощью встроенного допплера. Информация о скорости, времени и навигации отображается на клавиатуре с 40-символьным дисплеем. Опция L2 добавляет 12 физических каналов квадратурного типа L2.
GPS-приемник ASHTECH XII был представлен в 1988 году. Он способен измерять псевдодальности, фазу несущей и интегрированный доплеровский доплеровский сигнал до 12 спутников на L1. Измерение псевдодальностей сглажено с помощью встроенного допплера. Информация о скорости, времени и навигации отображается на клавиатуре с 40-символьным дисплеем. Опция L2 добавляет 12 физических каналов квадратурного типа L2.
GPS-приемник ASHTECH XII представляет собой наиболее совершенную систему, простую в обращении и не требующую процедур инициализации. Измерения всех спутников в поле зрения выполняются автоматически. Данные могут храниться во внутренней твердотельной памяти емкостью 5 Мбайт. Минимальный интервал выборки составляет 0,5 секунды. Как и многие другие приемники, он имеет следующие дополнительные опции, а именно.
— Выход сигнала синхронизации 1 ppm
— Вход фотограмметрической камеры
— Навигация по путевым точкам
— Дифференциальная навигация в реальном времени и предоставление программного обеспечения для обработки портов и планирования обзора
В 1991 году на рынок поступил GPS-приемник ASHTECH P-12. Он имеет 12 выделенных каналов L1, P-кода и несущей и 12 выделенных каналов L2, P-кода и несущей. Он также имеет 12 L1, C/A кодовых и несущих каналов и 12 каналов L2 без квадратурного кода. Таким образом, приемник содержит 48 каналов и обеспечивает все возможности наблюдения за всеми видимыми спутниками. Соотношение сигнал-шум для измерения фазы на L2 лишь немного меньше, чем на L1, и значительно лучше, чем при использовании бескодовых методов. В случае активированного P-кодового шифрования можно использовать опцию L2 без кода.
Он имеет 12 выделенных каналов L1, P-кода и несущей и 12 выделенных каналов L2, P-кода и несущей. Он также имеет 12 L1, C/A кодовых и несущих каналов и 12 каналов L2 без квадратурного кода. Таким образом, приемник содержит 48 каналов и обеспечивает все возможности наблюдения за всеми видимыми спутниками. Соотношение сигнал-шум для измерения фазы на L2 лишь немного меньше, чем на L1, и значительно лучше, чем при использовании бескодовых методов. В случае активированного P-кодового шифрования можно использовать опцию L2 без кода.
TURBO ROGUE SNR-8000 — это портативный приемник весом около 4 кг, потребляющий 15 Вт энергии и подходящий для использования в полевых условиях. Он имеет 8 параллельных каналов на L1 и L2. Он предоставляет кодовые и фазовые данные на обеих частотах и имеет опцию без кода. Полное отслеживание P-кода обеспечивает высочайшую точность измерения фазы и псевдоагрессии, бескодовое отслеживание — это автоматический режим «полный назад». В бескодовом режиме используется тот факт, что каждая несущая имеет идентичную модуляцию P-кода/Y-кода, и, следовательно, сигнал L1 может быть взаимно коррелирован с сигналом L2. Результаты измерения дифференциальной фазы (L1-L2) и измерения групповой задержки (P1-P2)
Результаты измерения дифференциальной фазы (L1-L2) и измерения групповой задержки (P1-P2)
Характеристики точности:
Псевдодиапазон P-кода 1 см (интеграция 5 минут)
Бескодовый псевдодиапазон 10 см (интеграция 5 минут)
Несущая фаза 0,2–0,3 мм
Фаза без кода 0,2–0,7 мм
Одной из важных особенностей является то, что на 100 спутниковых часов ожидается менее 1 сбоя цикла.
Навигационные приемники
Навигационные приемникибыстро завоевывают рынок.В большинстве случаев используется один канал кодовой последовательности или мультиплексирования C/A. Однако все большую популярность приобретают модули с четырьмя или пятью параллельными каналами. Положение и скорость выводятся из измерения псевдодальности кода C/A и отображаются или загружаются в персональный компьютер. Обычно ни необработанные данные, ни информация о фазе несущей недоступны. В некоторых продвинутых моделях возможна дифференциальная навигация.
MAGELLAN NAV 1000 — это портативный GPS-приемник, вес которого составляет всего 850 граммов. Он был представлен в 1989 году, а позже, в 1990 году, была запущена модель NAV 1000 PRO. Это одноканальный приемник, который отслеживает от 3 до 4 спутников с частотой обновления 2,5 секунды и имеет порт данных RS 232.
Он был представлен в 1989 году, а позже, в 1990 году, была запущена модель NAV 1000 PRO. Это одноканальный приемник, который отслеживает от 3 до 4 спутников с частотой обновления 2,5 секунды и имеет порт данных RS 232.
Следующей моделью 1991 года стала NAV 5000 PRO. Это 5-канальный приемник, отслеживающий все видимые спутники с частотой обновления 1 секунда. Возможна дифференциальная навигация. Данные фазы несущей можно использовать с дополнительным модулем фазы несущей. Четырехзаходная антенна встроена в приемник.Постобработка данных также возможна с использованием геодезического приемника, такого как ASHTECH XII, расположенного на опорной станции. Относительная точность составляет от 3 до 5 метров. Во многих случаях этого достаточно для тематических целей.
Многие портативные навигационные приемники доступны с дополнительными функциями. Актуальную информацию о ситуации на рынке можно получить из таких журналов, как GPS world и т. д.
Для большинства целей навигации достаточно одночастотного приемника кода C/A. Для требований к точности выше 50–100 метров необходима дифференциальная опция.Для требований ниже 5 метров необходимо включение данных фазы несущей. В высокоточной навигации рекомендуется использовать пару приемников с полными геодезическими возможностями.
Для требований к точности выше 50–100 метров необходима дифференциальная опция.Для требований ниже 5 метров необходимо включение данных фазы несущей. В высокоточной навигации рекомендуется использовать пару приемников с полными геодезическими возможностями.
Основные характеристики универсального геодезического приемника приведены в таблице 4.
Ресивер | Канал | Код | Длина волны | Защита от спуфинга | |||
Л1 | L2 | Л1 | L2 | Л1 | L2 | ||
ТИ 4100 | 4 | 4 | Р | Р | Одна частота | ||
МАКРОМЕТР | 6 | 6 | — | — | /2 | Не влияет | |
АШТЕК XII | 12 | 12 | К/А | — | /2 | Не влияет | |
АШТЕК Р 12 | 12 | 12 | К/А, П | Р | Квадрат | ||
ТРИМБЛ SST | 8-12 | 8-12 | К/А | — | /2 | Не влияет | |
ТРИМБЛ 4000 | 9-12 | 9-12 | К/А, П | Р | Бескодовый SSE | ||
ВМ 102 | 7 пар | 1 последовательность | К/А | Р | Квадрат | ||
ДИКИЙ GPS 200 | 9 | 9 | К/А | р | Бескодовый | ||
ТУРБО-РАЗбойник | 8 | 8 | К/А, П | Р | Без кода | ||
Некоторые из важных характеристик при выборе геодезического приемника:
— Отслеживание всех спутников
— Обе частоты
— Полная длина волны на L2
— Низкий фазовый шум-низкий кодовый шум
— Высокая частота дискретизации для L1 и L2
— Большой объем памяти
— Низкое энергопотребление
— Полная работоспособность в условиях защиты от спуфинга
Кроме того, рекомендуется использовать двухчастотный приемник, чтобы свести к минимуму ионно-сферические влияния и воспользоваться преимуществом решения неоднозначности.
Точность
Как правило, приемник SPS может предоставлять информацию о местоположении с погрешностью менее 25 метров и информацию о скорости с погрешностью менее 5 метров в секунду. До 2 мая 2000 г. правительство США активировало выборочную доступность (SA) для поддержания оптимальной военной эффективности. Избирательная доступность вносит случайные ошибки в эфемеридную информацию, передаваемую спутниками, что снижает точность SPS примерно до 100 метров.
Для многих приложений 100-метровая точность более чем приемлема.Для приложений, требующих гораздо большей точности, влияние SA и ошибок, вызванных окружающей средой, можно преодолеть с помощью метода, называемого дифференциальным GPS (DGPS), который повышает общую точность.
Дифференциальная теория
Дифференциальное позиционирование — это метод, который позволяет преодолеть влияние ошибок окружающей среды и SA на сигналы GPS, чтобы обеспечить высокоточное определение местоположения. Это делается путем определения величины ошибки позиционирования и ее применения к исправлениям положения, которые были вычислены на основе собранных данных.
Как правило, горизонтальная точность определения местоположения с помощью приемника GPS составляет 15 метров RMS (среднеквадратичное значение) или выше. Если распределение отметок относительно истинного положения является нормальным по окружности с нулевым средним значением, точность 15 метров RMS означает, что около 63% отладок, полученных во время сеанса, находятся в пределах 15 метров от истинного положения.
Типы ошибок
Существует два типа ошибок позиционирования: исправимые и неисправимые. Исправимые ошибки — это ошибки, которые практически одинаковы для двух приемников GPS в одной и той же области.Неисправимые ошибки не могут быть сопоставлены между двумя приемниками GPS в одной и той же области.
Исправимые ошибки
Источники исправимых ошибок включают спутниковые часы, данные об эфемеридах и задержку в ионосфере и тропосфере. В случае реализации SA может также вызвать исправимую ошибку позиционирования. Ошибки часов и ошибки эфемерид возникают из-за спутника GPS. Ошибка часов — это медленно меняющаяся ошибка, которая появляется как погрешность в измерении псевдодальности, сделанном приемником. Эфемеридная ошибка — это остаточная ошибка в данных, используемых приемником для определения местоположения спутника в космосе.
Ошибка часов — это медленно меняющаяся ошибка, которая появляется как погрешность в измерении псевдодальности, сделанном приемником. Эфемеридная ошибка — это остаточная ошибка в данных, используемых приемником для определения местоположения спутника в космосе.
Ошибки ионосферной задержки и ошибки тропосферной задержки вызваны атмосферными условиями. Ионосферная задержка вызвана плотностью электронов в ионосфере на пути прохождения сигнала. Задержка в тропосфере связана с влажностью, температурой и высотой на пути прохождения сигнала. Обычно тропосферная ошибка меньше ионосферной.
Еще одна исправимая ошибка вызвана SA, которая используется Министерством обороны США для внесения ошибок в сигналы GPS стандартной службы позиционирования (SPS) для снижения точности определения местоположения.
Величина ошибки и направление ошибки в любой момент времени не меняются быстро. Таким образом, два приемника GPS, которые находятся достаточно близко друг к другу, будут наблюдать одну и ту же ошибку фиксации, и можно определить размер ошибки фиксации.
Неисправимые ошибки
Неисправимые ошибки не могут быть сопоставлены между двумя приемниками GPS, расположенными в одной и той же области. Источники неисправимых ошибок включают в себя шум приемника, который неизбежно присущ любому приемнику, и ошибки многолучевости, возникающие из-за окружающей среды.Ошибки многолучевости вызваны тем, что приемник «видит» отражения сигналов, которые отразились от окружающих объектов. Антенна субметрового диапазона устойчива к многолучевому распространению; его использование требуется при регистрации данных фазы несущей. Ни одна из ошибок не может быть устранена с помощью дифференциала, но их можно существенно уменьшить с помощью усреднения определения местоположения. Источники ошибок и приблизительный диапазон среднеквадратичных ошибок приведены в таблице 5.
зл. Раджу | 147 |
Таблица 5.Источники ошибок | |
Источник ошибки | Прибл. |
Корректируемый с помощью дифференциала | |
Часы (Космический сегмент) | 3,0 |
Эфемериды (сегмент управления) | 2,7 |
Ионосферная задержка (атмосфера) | 8.2 |
Тропосферная задержка (атмосфера) | 1,8 |
Выборочная доступность (если реализовано) | 27,4 |
Итого | 28,9 |
Некорректируемый с дифференциалом | |
Шум приемника (единица измерения) | 9.1 |
Многолучевое распространение (окружающая среда) | 3,0 |
Итого | 9,6 |
Всего пользователей Ошибка эквивалентного диапазона (все источники) | 30,5 |
Навигационная точность (HDOP = 1,5) | 45,8 |
 Эквивалентная ошибка диапазона (RMS) в метрах
Эквивалентная ошибка диапазона (RMS) в метрахПродолжить чтение здесь: Дифференциал
Была ли эта статья полезной?
Самодельный GPS-приемник #piday #raspberrypi @Raspberry_Pi « Adafruit Industries — производители, хакеры, художники, дизайнеры и инженеры!
Самодельный GPS-приемник Эндрю Холма:
На создание этого приемника у меня возникла мотивация после прочтения работы [1] Матьяжа Видмара, S53MV, который более 20 лет разрабатывал GPS-приемник с нуля, используя в основном дискретные компоненты.
Все спутники GPS передают на одной и той же частоте 1575,42 МГц, используя спектр прямой последовательности (DSSS). Несущая L1 распространяется в полосе пропускания 2 МГц, и ее уровень на поверхности Земли составляет -130 дБм.Мощность теплового шума в той же полосе частот составляет -111 дБм, поэтому сигнал GPS на приемной антенне примерно на 20 дБ ниже уровня собственных шумов. То, что любой из присутствующих сигналов, наложенных один на другой и скрытых в шуме, может быть восстановлен после двухуровневого квантования, кажется нелогичным!
GPS использует корреляционные свойства псевдослучайных последовательностей, называемых кодами Голда, для отделения сигналов от шума и друг от друга.
 тому назад.Меня заинтересовало его использование DSP после жесткого ограничения ПЧ и 1-битного АЦП. Описанный здесь приемник работает по тому же принципу. Его 1-битный АЦП представляет собой 6-контактную ИС рядом с контактными разъемами, компаратор LVDS-выхода. Скрытые под шумом, но не стертые в возникающей двухуровневой квантованной каше, сигналы от каждого видимого спутника.
тому назад.Меня заинтересовало его использование DSP после жесткого ограничения ПЧ и 1-битного АЦП. Описанный здесь приемник работает по тому же принципу. Его 1-битный АЦП представляет собой 6-контактную ИС рядом с контактными разъемами, компаратор LVDS-выхода. Скрытые под шумом, но не стертые в возникающей двухуровневой квантованной каше, сигналы от каждого видимого спутника. Каждый спутник передает уникальную последовательность. Все некоррелированные сигналы являются шумом, в том числе сигналами других спутников и жесткими ограничителями ошибок квантования.Смешивание с тем же кодом в правильной фазе сужает полезный сигнал и еще больше расширяет все остальное. Затем узкополосная фильтрация удаляет широкополосный шум, не влияя на полезный (опять же узкий) сигнал. Жесткое ограничение (1-разрядный АЦП) снижает отношение сигнал-шум менее чем на 3 дБ — цена, которую стоит заплатить, чтобы избежать аппаратной АРУ.
Каждый спутник передает уникальную последовательность. Все некоррелированные сигналы являются шумом, в том числе сигналами других спутников и жесткими ограничителями ошибок квантования.Смешивание с тем же кодом в правильной фазе сужает полезный сигнал и еще больше расширяет все остальное. Затем узкополосная фильтрация удаляет широкополосный шум, не влияя на полезный (опять же узкий) сигнал. Жесткое ограничение (1-разрядный АЦП) снижает отношение сигнал-шум менее чем на 3 дБ — цена, которую стоит заплатить, чтобы избежать аппаратной АРУ.Схемы, диаграммы, коды и многое другое здесь!
Поскольку 2022 год начинается, давайте уделим немного времени, чтобы поделиться нашими целями для CircuitPython в 2022 году. Как и в прошлые годы (полное резюме 2019, 2020 и 2021), мы хотели бы, чтобы все в сообществе CircuitPython внесли свой вклад, опубликовав свои мысли в какое-то публичное место в Интернете.Вот несколько способов размещения: видео на YouTub, сообщение на форуме CircuitPython, сообщение в блоге на вашем сайте, серия твитов, суть на GitHub. Ждем вашего ответа. Когда вы публикуете, пожалуйста, добавьте #CircuitPython2022 и отправьте электронное письмо по адресу [email protected] , чтобы сообщить нам о вашем сообщении, чтобы мы могли разместить его здесь.
Ждем вашего ответа. Когда вы публикуете, пожалуйста, добавьте #CircuitPython2022 и отправьте электронное письмо по адресу [email protected] , чтобы сообщить нам о вашем сообщении, чтобы мы могли разместить его здесь.
Хватит макетировать и паять – приступайте к изготовлению немедленно! Игровая площадка Adafruit’s Circuit Playground битком набита светодиодами, датчиками, кнопками, клипсами типа «крокодил» и многим другим.Создавайте проекты с помощью Circuit Playground за несколько минут с помощью сайта программирования MakeCode с функцией перетаскивания, изучайте информатику с помощью класса CS Discoveries на code.org, переходите в CircuitPython, чтобы вместе изучать Python и аппаратное обеспечение, TinyGO или даже используйте Arduino. ИДЕ. Circuit Playground Express — новейшая и лучшая плата Circuit Playground с поддержкой CircuitPython, MakeCode и Arduino. Он имеет мощный процессор, 10 NeoPixels, мини-динамик, инфракрасный прием и передачу, две кнопки, переключатель, 14 зажимов типа «крокодил» и множество датчиков: емкостное касание, ИК-близость, температура, свет, движение и звук.Целый огромный мир электроники и кодирования ждет вас, и он умещается на вашей ладони.
Он имеет мощный процессор, 10 NeoPixels, мини-динамик, инфракрасный прием и передачу, две кнопки, переключатель, 14 зажимов типа «крокодил» и множество датчиков: емкостное касание, ИК-близость, температура, свет, движение и звук.Целый огромный мир электроники и кодирования ждет вас, и он умещается на вашей ладони.
Присоединяйтесь к более чем 32 000 создателей на каналах Adafruit в Discord и станьте частью сообщества! http://adafru.it/discord
Хотите поделиться потрясающим проектом? Выставка Electronics Show and Tell проходит каждую среду в 19:00 по восточному времени! Чтобы присоединиться, зайдите на YouTube и проверьте чат шоу — мы опубликуем ссылку там.
Присоединяйтесь к нам каждую среду в 20:00 по восточноевропейскому времени, чтобы задать вопрос инженеру!
Подпишитесь на Adafruit в Instagram, чтобы узнать о совершенно секретных новых продуктах, закулисных событиях и многом другом https://www.instagram.com/adafruit/
 youtube.com/embed/40gZBLdDSZA» frameborder=»0″ allow=»autoplay; encrypted-media» allowfullscreen=»»/>
youtube.com/embed/40gZBLdDSZA» frameborder=»0″ allow=»autoplay; encrypted-media» allowfullscreen=»»/>
CircuitPython — Самый простой способ программирования микроконтроллеров — CircuitPython.org
Получайте единственный свободный от спама ежедневный информационный бюллетень о носимых устройствах, ведении «производственного бизнеса», электронных советах и многом другом! Подпишитесь на AdafruitDaily.com!Комментариев пока нет.
Извините, форма комментариев в настоящее время закрыта.
Урок 4: Приемники и методы
Вверху слева: микрополосковая патч-антенна, вверху справа: четырехзаходная антенна
внизу слева: дипольная антенна, внизу справа: спиральная антенна
На рисунке показаны типы антенн.Они не являются конкретно GPS-антеннами.
Большинство приемников имеют встроенную антенну, но многие из них также могут быть оборудованы отдельной антенной, устанавливаемой на треногу или дальномерную веху. Эти отдельные антенны иногда требуют подключения коаксиальных кабелей. Кабели – важная деталь. Чем длиннее кабель, тем больше теряется сигнал GPS при прохождении через него. Обычно они имеют стандартную длину, чтобы обеспечить возможность калибровки полного сопротивления кабеля.
Кабели – важная деталь. Чем длиннее кабель, тем больше теряется сигнал GPS при прохождении через него. Обычно они имеют стандартную длину, чтобы обеспечить возможность калибровки полного сопротивления кабеля.
Как упоминалось ранее, длины волн несущих GPS составляют 19 см (L1), 24 см (L2) и 25 см (L5), а антенны с длиной волны в четверть или половину длины волны, как правило, наиболее практичны и эффективны, поэтому GPS Антенные элементы могут быть размером всего 4 или 5 см.Большинство производителей приемников используют микрополосковую антенну . Они также известны как патч-антенны. Микрополоска может иметь патч для каждой частоты, чтобы она могла принимать одну или все несущие GPS. Микрополосковые антенны прочны, компактны, имеют простую конструкцию и малый профиль. Следующая наиболее часто используемая антенна известна как диполь . Возможно, вы помните, что именно такая антенна использовалась в Macrometer, первом коммерческом GPS-приемнике. Дипольная антенна имеет стабильный фазовый центр и простую конструкцию, но требует хорошего заземляющего слоя. Заземленная плоскость также облегчает использование микрополосковой антенны, поскольку она не только улучшает многолучевость, но также имеет тенденцию увеличивать усиление антенны в зените, другими словами, усиление антенны прямо вверх. Четырехзаходная антенна представляет собой одночастотную антенну с двумя ортогональными бифилярными спиральными петлями на общей оси. Четырехзаходные антенны работают лучше, чем микрополосковые, на судах, которые качаются и качаются, например, на лодках и самолетах. Они также используются во многих портативных GPS-приемниках для отдыха.Такие антенны имеют хорошую диаграмму усиления, не требуют заземления, но не являются азимутально-симметричными. Наименее распространенная конструкция — спиральная антенна. Спираль представляет собой двухчастотную антенну. Он имеет хорошую диаграмму усиления, но высокий профиль.
Заземленная плоскость также облегчает использование микрополосковой антенны, поскольку она не только улучшает многолучевость, но также имеет тенденцию увеличивать усиление антенны в зените, другими словами, усиление антенны прямо вверх. Четырехзаходная антенна представляет собой одночастотную антенну с двумя ортогональными бифилярными спиральными петлями на общей оси. Четырехзаходные антенны работают лучше, чем микрополосковые, на судах, которые качаются и качаются, например, на лодках и самолетах. Они также используются во многих портативных GPS-приемниках для отдыха.Такие антенны имеют хорошую диаграмму усиления, не требуют заземления, но не являются азимутально-симметричными. Наименее распространенная конструкция — спиральная антенна. Спираль представляет собой двухчастотную антенну. Он имеет хорошую диаграмму усиления, но высокий профиль.
Полоса пропускания
Диаграммы спектральной плотности мощности (PSD) для L1 и L2
Источник: GPS для геодезистов
Антенна должна иметь полосу пропускания, соответствующую области ее применения. Как правило, чем больше пропускная способность, тем выше производительность; однако есть и обратная сторона.Увеличенная полоса пропускания ухудшает отношение сигнал/шум, добавляя больше помех. Эти диаграммы PSD иллюстрируют мощность сигналов кодов C/A и P на полосу пропускания в ваттах на герц как функцию частоты. Микрополосковые антенны GPS обычно работают в диапазоне частот примерно от 2 до 20 МГц, что соответствует полосе пропускания сигналов GPS от нуля до нуля. Например, сигнал L2C, как и сигнал C/A, имеет полосу обзора 2,046 мегагерца. Вы можете увидеть это в самой высокой части или в центральной части диаграммы.L5, как и P-код, имеет полосу пропускания 20,46 мегагерц, как показано красным цветом. Таким образом, антенна на переднем конце приемника должна иметь полосу пропускания 20,46 мегагерц, если она должна отслеживать все эти сигналы. Если система отслеживает код C/A или только L2C, она может иметь более узкую полосу пропускания. Для центрального лепестка кода C/A потребуется 2,046 МГц, или, если бы он был разработан для отслеживания сигнала L1C, его полоса пропускания должна была бы составлять 4,092 МГц.
Как правило, чем больше пропускная способность, тем выше производительность; однако есть и обратная сторона.Увеличенная полоса пропускания ухудшает отношение сигнал/шум, добавляя больше помех. Эти диаграммы PSD иллюстрируют мощность сигналов кодов C/A и P на полосу пропускания в ваттах на герц как функцию частоты. Микрополосковые антенны GPS обычно работают в диапазоне частот примерно от 2 до 20 МГц, что соответствует полосе пропускания сигналов GPS от нуля до нуля. Например, сигнал L2C, как и сигнал C/A, имеет полосу обзора 2,046 мегагерца. Вы можете увидеть это в самой высокой части или в центральной части диаграммы.L5, как и P-код, имеет полосу пропускания 20,46 мегагерц, как показано красным цветом. Таким образом, антенна на переднем конце приемника должна иметь полосу пропускания 20,46 мегагерц, если она должна отслеживать все эти сигналы. Если система отслеживает код C/A или только L2C, она может иметь более узкую полосу пропускания. Для центрального лепестка кода C/A потребуется 2,046 МГц, или, если бы он был разработан для отслеживания сигнала L1C, его полоса пропускания должна была бы составлять 4,092 МГц. Двухчастотная микрополосковая антенна, скорее всего, будет работать в полосе частот от 10 до 20 МГц.
Двухчастотная микрополосковая антенна, скорее всего, будет работать в полосе частот от 10 до 20 МГц.
Покрытие почти полушария
Схема антенны GPS
Поскольку антенна GPS спроектирована как всенаправленная, ее диаграмма усиления, то есть изменение усиления в диапазоне азимутов и углов возвышения, должна быть почти полной полусферой, но не идеальной полусферой. Например, большинство геодезических приложений фильтруют сигналы с очень низких высот, чтобы уменьшить влияние многолучевости и атмосферных задержек. Часть сигнала GPS может поступать в антенну ниже угла маски; поэтому диаграмма усиления антенны специально разработана для подавления таких сигналов.Во-вторых, контуры равной фазы вокруг электронного центра антенны, то есть фазового центра, сами по себе не являются идеально сферическими.
Усиление, или диаграмма усиления, описывает успех антенны GPS в сборе большего количества энергии из-под угла маски и меньше из-под угла маски. Усиление примерно от 3 до 5 децибел (дБ) типично для антенны GPS. Просто краткое описание децибела — мы еще увидим его немного больше. Децибел — это десятая часть колокола, названная в честь Александра Грэма Белла.Это логарифмическая безразмерная единица, используемая для сравнения. В этом случае усиление реальной GPS-антенны сравнивается с теоретической антенной без потерь, которая имеет совершенно одинаковые возможности во всех направлениях. Это мнимое совершенство известно как изотропная антенна. Кстати, увеличение на 3 децибела указывает на удвоение уровня сигнала, а уменьшение на 3 децибела указывает на уменьшение уровня сигнала вдвое, поэтому типичная всенаправленная GPS-антенна с коэффициентом усиления около 3 дБ (децибел) имеет примерно 50% возможностей антенны. идеальная изотропная антенна.
Усиление примерно от 3 до 5 децибел (дБ) типично для антенны GPS. Просто краткое описание децибела — мы еще увидим его немного больше. Децибел — это десятая часть колокола, названная в честь Александра Грэма Белла.Это логарифмическая безразмерная единица, используемая для сравнения. В этом случае усиление реальной GPS-антенны сравнивается с теоретической антенной без потерь, которая имеет совершенно одинаковые возможности во всех направлениях. Это мнимое совершенство известно как изотропная антенна. Кстати, увеличение на 3 децибела указывает на удвоение уровня сигнала, а уменьшение на 3 децибела указывает на уменьшение уровня сигнала вдвое, поэтому типичная всенаправленная GPS-антенна с коэффициентом усиления около 3 дБ (децибел) имеет примерно 50% возможностей антенны. идеальная изотропная антенна.
Децибел-ватт, дБВт, указывает фактическую мощность сигнала по сравнению с эталонным значением в один ватт. Минимальная мощность, полученная от кода C/A на L1, составляет около -160 дБВт, -160 децибел-Ватт, а минимальная мощность, полученная от P код на L2 еще меньше при -166 дБВт.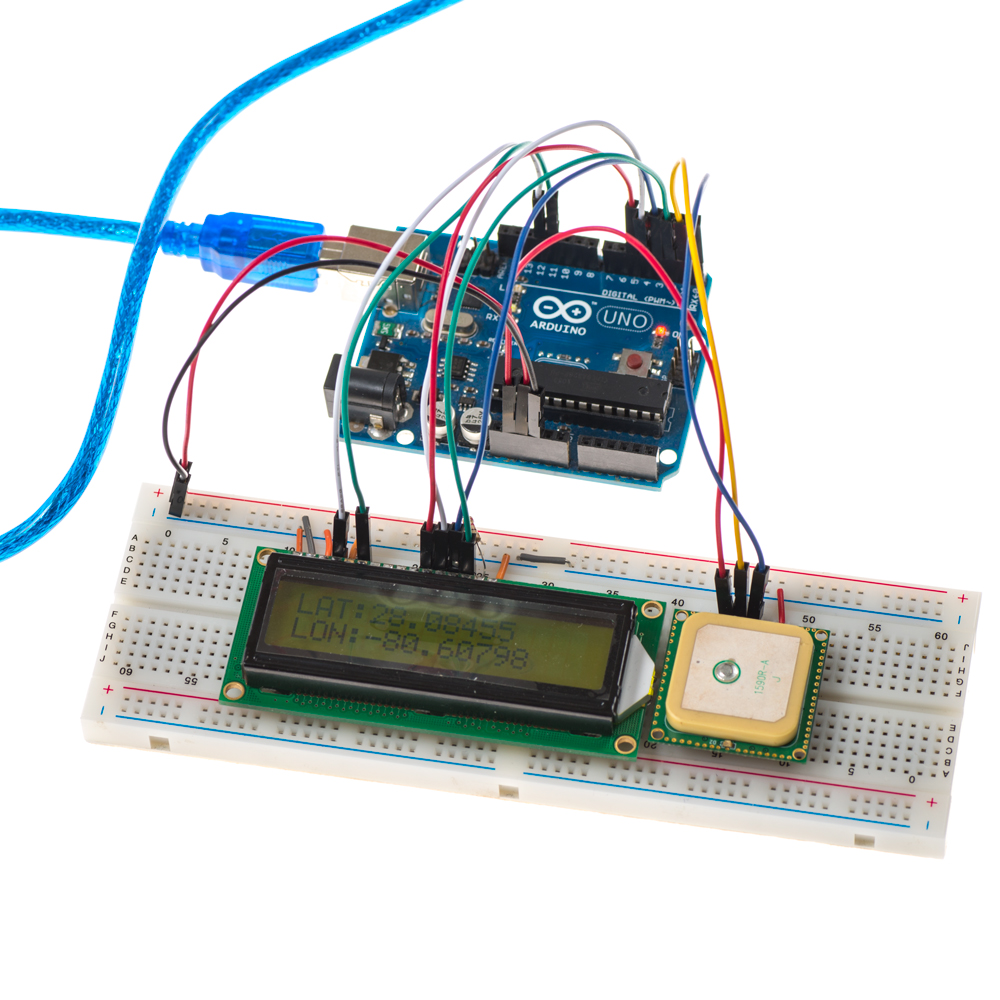 Важно, чтобы антенны и предварительные усилители приемника GPS были максимально эффективными, поскольку мощность, принимаемая от спутников GPS, невелика.
Важно, чтобы антенны и предварительные усилители приемника GPS были максимально эффективными, поскольку мощность, принимаемая от спутников GPS, невелика.
Ориентация антенны
Антенна ориентирована на север
В идеальной GPS-антенне фазовый центр диаграммы усиления будет точно совпадать с ее фактическим, физическим центром.Если бы такое было возможно, центрирование антенны над точкой на земле обеспечило бы и ее электронное центрирование. Но эта абсолютная уверенность остается недостижимой по нескольким причинам.
Важно помнить, что положение на каждом конце базовой линии GPS — это положение фазового центра антенны на каждом конце, а не их физических центров, и фазовый центр не является неподвижной точкой. Положение фазового центра на самом деле немного меняется в зависимости от сигнала спутника.Например, для L2 она отличается от L1 или L5. Кроме того, по мере изменения азимута, интенсивности и высоты принимаемого сигнала меняется и разница между фазовым центром и физическим центром. Небольшие азимутальные эффекты также могут быть вызваны местной средой вокруг антенны. Но большая часть изменений фазового центра связана с изменениями высоты спутника. В конце концов, физический центр и фазовый центр антенны могут находиться на расстоянии нескольких сантиметров друг от друга.С другой стороны, с современными патч-антеннами это может быть всего несколько миллиметров. Хорошо, что смены носят систематический характер. Чтобы компенсировать часть этой ошибки смещения, большинство производителей приемников рекомендуют пользователям убедиться, что все их антенны ориентированы в одном направлении при проведении одновременных наблюдений в сети точек. Некоторые производители наносят на антенну контрольные метки, чтобы каждую можно было повернуть на один и тот же азимут, обычно на север, чтобы сохранить одинаковое относительное положение между их физическим и фазовым электронным центром.Ориентируя все антенны в одном и том же направлении, смещение между фазовым центром и физическим центром будет в одном и том же направлении в каждой точке.
Небольшие азимутальные эффекты также могут быть вызваны местной средой вокруг антенны. Но большая часть изменений фазового центра связана с изменениями высоты спутника. В конце концов, физический центр и фазовый центр антенны могут находиться на расстоянии нескольких сантиметров друг от друга.С другой стороны, с современными патч-антеннами это может быть всего несколько миллиметров. Хорошо, что смены носят систематический характер. Чтобы компенсировать часть этой ошибки смещения, большинство производителей приемников рекомендуют пользователям убедиться, что все их антенны ориентированы в одном направлении при проведении одновременных наблюдений в сети точек. Некоторые производители наносят на антенну контрольные метки, чтобы каждую можно было повернуть на один и тот же азимут, обычно на север, чтобы сохранить одинаковое относительное положение между их физическим и фазовым электронным центром.Ориентируя все антенны в одном и том же направлении, смещение между фазовым центром и физическим центром будет в одном и том же направлении в каждой точке. Поэтому базовые линии получаются точно такими же, как если бы физический центр и фазовый центр совпадали.
Поэтому базовые линии получаются точно такими же, как если бы физический центр и фазовый центр совпадали.
Только когда мы говорим о контрольной работе, работе, которая должна быть достаточно точной, все антенны должны быть ориентированы в одном направлении.
Высота прибора
Измерение высоты антенны
Конфигурация антенны также влияет на другое измерение, имеющее решающее значение для успешной работы GPS, — на высоту инструмента.Неправильная высота инструмента является одной из ошибок, которых легко избежать. Измерение обычно производится по некоторой контрольной метке на антенне. На этой диаграмме вы видите множество способов измерения этой высоты. Его можно измерить на наклонной высоте или измерить рулеткой, обычно до опорной точки антенны. ARP, или опорная точка антенны, часто находится в нижней части крепления антенны. Обычно необходимо добавить поправку, чтобы фактически приблизить это измерение к фазовому центру антенны.Это также становится частью необходимой информации при использовании постоянно работающих опорных станций. Ранее мы говорили о том, что можно загружать данные со станций, управляемых NGS, непрерывно работающей опорной станцией (CORS), которые доступны в Интернете, и выполнять постобработку наблюдений, сделанных с помощью передвижного GPS-приемника. Если вы это делаете, также необходимо знать высоту антенны на CORS. Конечно, это не та антенна, которую вы бы настроили, но эта информация доступна вместе с файлами с базовой станции.
Ранее мы говорили о том, что можно загружать данные со станций, управляемых NGS, непрерывно работающей опорной станцией (CORS), которые доступны в Интернете, и выполнять постобработку наблюдений, сделанных с помощью передвижного GPS-приемника. Если вы это делаете, также необходимо знать высоту антенны на CORS. Конечно, это не та антенна, которую вы бы настроили, но эта информация доступна вместе с файлами с базовой станции.
Создайте свой собственный / сделай сам ADS-B в приемнике
В последнее время мы много писали о ADS-B. Мы сделали краткий обзор технологии ADS-B и истории NextGen еще в 2018 году. Совсем недавно мы более подробно рассмотрели технологию, обсуждая наиболее важные требования к ADS-B.
Теперь мы собираемся переключиться и сосредоточиться исключительно на ADS-B In. В частности, мы собираемся показать вам, как собрать собственный приемник ADS-B In! Мы используем продукт, разработанный компанией Stratux, с некоторыми стандартными деталями и Raspberry Pi.
В этой статье мы обсудим:
- Как произошло Как произошло
- Список запчастей, что они есть, а что они делают
-
- EFB Возможности
Мы здесь в OneenginePilot, хотите ясно, что мы никоим образом не связаны со Stratux. Приемник Stratux ADS-B In — это то, о чем мы слышали и думали, что это круто, поэтому мы решили рассказать вам об этом!
Это рекомендуемый чехол, за исключением внешних батарей и антенн.Как появился Stratux
К настоящему времени вы знаете, что мандат FAA на ADS-B Out вступает в силу 1 января 2020 года. На момент написания этой статьи это всего 10 месяцев, и некоторые изменения еще впереди.
К этому моменту вы, вероятно, забыли о ADS-B Out больше, чем помните! Более того, вы, вероятно, читали больше об ADS-B Out, чем об ADS-B In, поскольку первое требуется, а второе — нет.
И это немного обидно. Технология ADS-B и NextGen меняют правила игры для GA.Однако пилотам необходим приемник ADS-B In, чтобы воспользоваться всеми преимуществами NextGen.
АБС-В В
Думайте о ADS-B In как о бортовом УВД.
Обеспечивает:
- Информация о дорожном движении, включая высоту, скорость, курс и расстояние до других воздушных судов, оснащенных ADS-B Out (которыми, по сути, являются все остальные)
- Служба дорожной информации (TIS-B) для воздушных судов, не оснащенных в США)
- Информация о погоде, такая как прогнозы погоды и данные радара, через службы полетной информации (FIS-B, только в США.S.)
- FIS-B также будет транслировать временные ограничения на полеты (TFR) и уведомления для пилотов (NOTAM) для самолетов, оборудованных UAT (только в США) для выхода ADS-B. Это связано с тем, что, в отличие от ADS-B Out, устройства ADS-B In не нужно устанавливать непосредственно в самолет.
Вместо этого вы можете купить портативное устройство.
Вы просто возите его с собой в летной сумке вместе с гарнитурой, портативной радиостанцией и бортовыми журналами. Мы гарантируем, что ваш самодельный приемник ADS-B станет вашей новой любимой косметикой!Почему вы, вероятно, не обновляете
Самым большим барьером для входа в ADS-B In является цена.Более того, пилоты не хотят платить за то, что, вероятно, в будущем будет стоить дешевле!
Это очень похоже на покупку нового телевизора. Не так давно телевизоры с плоским экраном были самой новой и популярной вещью в разделе электроники. Неудивительно, что у телевизоров с плоским экраном была соответствующая цена.
Но потом что-то случилось: цены на плоские экраны упали, так как их покупало все больше и больше людей.
Мы здесь, в Single Engine Pilot, не экономисты.Тем не менее, некоторые из нас проспали пару занятий по экономике и заметили закономерность: а именно, новая технология изначально стоит очень дорого. Тем не менее, со временем цены падают, поскольку все больше и больше людей покупают эту технологию.
Таким образом, вы можете полностью переждать, пока капитализм догонит ваше желание иметь ADSB-In. Но, возможно, вы не хотите ждать. Может быть, вы хотите перепрыгнуть через систему. Это означает, что либо раскошеливаться на тесто…, либо сделать свое собственное.
через GIPHY
Stratux — Создайте свой собственный приемник ADS-B
Входит Крис Янг.Еще в 2015 году Янг только что получил свой инструментальный рейтинг и уже проявлял интерес к радио. Он также чувствовал снижение цен на ADS-B In.
Это вдохновило его на создание приемника Stratux ADS-B. Используя недорогой телевизионный тюнер USB и компьютер Raspberry Pi, Янг самостоятельно построил работающий приемник ADS-B.
Янг также остался верен научному методу. Он опубликовал свое программное обеспечение на GitHub и поделился списком деталей на Reddit. К счастью, все детали можно легко найти на Amazon.Более того, вы можете купить все чуть более чем за 100 долларов!
Янг уловил требование, которое в основном было безмолвным.
Многие пилоты либо смирились с тем, чтобы стиснуть зубы и оплатить стоимость коммерческого продукта, либо дождаться, когда цены в конечном итоге снизятся.Однако, как только изобретение Янга появилось в мире, оно зажило собственной жизнью. Люди были свободны делать то, что хотели, поскольку программное обеспечение имеет открытый исходный код, а детали настолько дешевы.
Другие предоставлены:
- Улучшение программного обеспечения
- Расширение его с однодиапазонного приемника до двухдиапазонного с GPS
- Изготовление настроенных антенн
- Поиск модулей GPS с лучшими характеристиками
Stratex с использованием RS-232.Это позволило отображать данные Stratux в вашей электронной системе пилотажных приборов (EFIS).
Теперь есть люди, которые создают приемники Stratux ADS-B и продают их через Интернет! На момент написания этой статьи на Amazon они стоят около 250 долларов.
Самое классное, что собрать его не так уж и сложно.
Вы в восторге от создания собственного ADSB-In? Потому что мы! Вы можете заказать запчасти в пятницу, получить их все к следующей пятнице и уже к субботе летать с новым приемником ADS-B!Серьезно, это очень просто и значительно дешевле, чем коммерческие версии.Это также так же надежно, как показывают наши тесты.
Список деталей
Список деталей для приемника Stratux ADS-B довольно короткий. Тем не менее, некоторые детали могут быть для вас чужими, если вы не потратили много времени на разборку авионики и ее подробное изучение (чего мы не советуем делать).
Эти детали обладают большой силой, несмотря на краткость списка. Более того, они еще и дешевые! Что может быть лучше, чем это?
Материнская плата Raspberry Pi 3 Модель B
Некоторым из вас может быть интересно, что такое материнская плата.Думайте о материнской плате как об УВД вашего электронного устройства.
Материнская плата:
- Координирует все процессы устройства
- Правильно распределяет питание
- Соединяет все компоненты устройства вместе
Связь со Stratux была прервана, когда мы заказывали нашу материнскую плату.
К счастью, с тех пор они обновили его. Мы смогли найти еще один на Amazon, чтобы заказать то, что нам нужно. Используйте ссылку Amazon в качестве резервной копии на случай, если у Stratux возникнут дополнительные проблемы.Имейте в виду, что приемник Stratux ADS-B специально разработан для работы с материнской платой Raspberry Pi 3B. Не купите по ошибке 3B+, одну из новых моделей Raspberry Pi.
SD-карта с предварительно запрограммированным программным обеспечением Stratux
Вам понадобится только крошечная карта. Адаптер не нужен для его использования.Эта миниатюрная карта содержит Stratux v.1.4r5, последнюю стабильную версию их программного обеспечения. Теперь плохие новости: мы могли или не могли купить последнюю SD-карту на момент написания этой статьи (наше плохое).
К счастью, быстрый поиск в Google выдал несколько других вариантов покупки. Мы нашли пару в продаже на eBay и еще один в магазине Computer Mall. Вы можете купить один из них, если Amazon не пополнил запасы к моменту публикации этой статьи.
Stratux 1090ES и UAT — радиостанции и антенны с высоким коэффициентом усиления
Антенный пакет получил немного дольше, потому что, знаете ли, Amazon. При цене 36,99 долларов это самая дорогая часть, которую вы купите.
В комплект входит:
- Одна антенна Stratux 1090ES
- Одна антенна Stratux 978 UAT
- Два пигтейла MCX – SMA
- Один предварительно запрограммированный «nano» SDR для антенны Stratux 1090ES MHz
- Один предварительно запрограммированный «nano» SDR Антенна UAT МГц
Комплект также отличается оптимизированным рассеиванием тепла и сниженным на 30 % энергопотреблением.
Корпус Stratux с вентилятором
Корпус Stratux белого цвета со встроенным вентилятором. Он изготовлен из литьевого пластика, который также является огнестойким.
Вы можете не найти этот чехол эстетичным, и это нормально. Если вы решите использовать что-то другое, убедитесь, что оно подойдет для двух SDR «нано» размера и Vk172/GYes, если вы выберете вариант с внешним GPS.
Аккумулятор с кабелем
Опять же, ссылка Amazon на веб-сайте Stratux не работает, когда мы первоначально заказываем наши детали.Однако Stratux, должно быть, прочитал наше электронное письмо, потому что они обновили ссылку.
Stratux рекомендует *глубокий вдох* Anker PowerCore II Slim 10000 Ultra Slim Power Bank *выдох* для питания приемника. Это зарядное устройство большой емкости, предназначенное для использования в качестве резервного аккумулятора для смартфонов и ноутбуков. Впрочем, для наших целей вполне подойдет.
Аккумулятор стоит на втором месте по цене 35,99 долларов, что на 1 доллар дешевле, чем комплект антенн. Он поставляется с дорожной сумкой, кабелем micro-USB, инструкцией по эксплуатации и 18-месячной гарантией.
GPS: VK-162/внешний или GPДа/внутренний
Если программное обеспечение — это голова, то GPS — это сердце.У вас есть два варианта GPS для приемника Stratux ADS-B. Вы можете выбрать внешний VK-162 или внутренний GPДа.
Как и антенны, VK-162 является компонентом «подключи и работай» для вашего приемника ADS-B. Он имеет магнитное основание и поставляется с 7-футовым шнуром, так что вы можете разместить его где угодно.
VK-162 поддерживает WAAS и был обновлен с помощью u-blox 7.Он также пыленепроницаем и обладает водостойкостью при сильных струях под высоким давлением.
Ваш внешний вариант — GPYes. Это идеальный вариант для пилота-минималиста, который хочет как можно меньше отвлекаться во время полета. Как следует из слова внутренний , GPYes подключен к материнской плате внутри корпуса Stratux.
Это второе поколение GP Да. Stratux улучшил прием, а также увеличил количество каналов отслеживания. Он также имеет защиту от радиопомех для защиты GPS от любых помех, которые может излучать другая электроника.
Датчик Stratux AHRS и контроллер вентилятора
Вы будете использовать контакты на материнской плате и чипе AHRS для соединения двух частей.Как и корпус, датчик AHRS и контроллер вентилятора являются продуктом Stratux. Однако не позволяйте размеру обмануть вас. Эта маленькая микросхема выполняет двойную функцию в вашем новом приемнике ADS-B.
Чип AHRS (сокращение от «система координат и курса») предоставляет вам ключевую информацию о пространственном положении вашего самолета, в том числе:
Это микросхема с распиновкой, что означает, что она не требует припайки к материнской плате.Вы просто вставляете «сторону контактов» в соответствующую часть материнской платы!
Другой функцией AHRS является управление бортовым вентилятором. Это гарантирует, что ваш приемник ADS-B не перегреется, когда вам это нужно больше всего.
Оконное крепление
Крепление к окну не является обязательным, но настоятельно рекомендуется. Он специально разработан для корпуса Stratux в списке деталей.
Итог
Детали для приемника Stratux ADS-B короткие и недорогие.Но не позволяйте этому обмануть вас, думая, что это не мощно! Stratux предоставил вам инструменты для доступа к одной из самых больших инноваций в авиации примерно за 100 долларов!
А кто знает? Сборка приемника ADS-B своими руками может открыть для вас новый аспект авиации, о котором вы никогда не думали, а тем более не получали удовольствия.
Создание комплекта
Вы купили комплект, получили инструкции и готовы к работе! В целом, процесс сборки может занять около получаса.
Нам стало не терпелось дождаться комплекта антенны и аккумуляторной батареи, поэтому мы пошли вперед и собрали все, что могли. Мы исходили из того, что в случае необходимости его можно будет легко разобрать, и мы были правы.
Инженер Джоэл, друг сайта, контролировал нас, пока мы делали это, чтобы свести к минимуму любые серьезные ошибки. Мы, , в данном случае фактически собираем приемник и пишем эту статью.
Шаг 1
Фотография наших поставок до того, как мы получили наши радиоприемники, антенны и аккумулятор.Это этап, на котором вы организуете работу, чтобы остальная часть процесса сборки прошла как можно более гладко.
- Выньте все детали из упаковочных коробок и аккуратно разложите их.
- Обратите внимание на то, что представляет собой каждая часть и что она делает.
- Прежде чем начать, обязательно полностью прочитайте инструкции и усвойте их.
Потратьте некоторое время на просмотр изображений, чтобы вы знали, что собираетесь делать. В конце концов, вы не хотите быть похожим на некоторых людей , которые могли записывать, а могли и не записывать, как строят его, и явно не внимательно прочитали инструкции.
Шаг 2
Части ящика выстроены на столеДостаньте свои инструменты, чтобы построить ящик. Все, что вам нужно, было предоставлено для вас.
- Откройте кейс и извлеките инструменты, предоставленные Stratux.
Там должны быть пара гаечных ключей, крошечная отвертка, винты и пара радиаторов.
Шаг 3
SD-карта вставляется в нижнюю часть материнской платы.Теперь установите SD-карту с программным обеспечением Stratux.
- Возьмите материнскую плату Raspberry Pi 3B и предварительно запрограммированную SD-карту из вашей коллекции деталей.
- Вставьте SD-карту в слот в нижней части материнской платы на противоположном конце портов USB (те квадратные штучки на другом конце материнской платы).
Нам потребовалась минута, чтобы понять это, но для этого вам не нужен адаптер SD-карты. Не стесняйтесь выбрасывать его в ящик для мусора или мусорное ведро.
Шаг 4
GPYes в соответствующем порту USB.Далее мы добавим GPS. Мы выбрали внутренний GPДа, так как не хотели нести больше оборудования, чем необходимо.
- Вставьте GPYes в верхний слот среднего USB-порта.
Остальные порты USB будут использоваться для радиочипов чуть позже.
Шаг 5
Добавьте радиаторы. Это маленькие штуки, похожие на радиаторы, которые прилагались к инструментам.
- Обратите внимание, что на материнской плате есть два места для радиаторов, одно побольше и одно поменьше.
- Возьмите один из радиаторов и снимите липкую ленту с нижней части.
- Разместите его там, где «стенки» радиатора обращены к более коротким концам корпуса Stratux.
- Прижмите клейкую сторону радиатора к микросхеме интегральной схемы соответствующего размера.
- Повторите вышеуказанные шаги для другого радиатора.
По словам инженера Джоэла, на самом деле не имеет значения, в какую сторону обращены радиаторы. Однако принято располагать их в одном направлении, так как это поможет им более эффективно отводить тепло.
Так что же такое радиатор? Радиатор — это компонент, который помогает охлаждать механические и электронные устройства, предотвращая их перегрев.
Радиаторы бывают двух типов:
Только что примененные радиаторы являются пассивными, так как в них нет движущихся частей. В машиностроении неподвижные части = 100% надежность. По сути, это маленькие алюминиевые радиаторы, которые отводят тепло за счет конвекции.
Однако это не единственные радиаторы приемника Stratux ADS-B.
Как вы заметили, в корпусе уже есть встроенный вентилятор.Вентилятор считается активным радиатором, поскольку он имеет движущиеся части. Это означает, что ваш новый приемник ADS-B имеет двойную теплозащиту!Довольно круто, да?
Шаг 6
Датчик AHRS представляет собой микросхему с распиновкой, которая надевается на контактную планку материнской платы.Теперь добавим плату Stratux AHRS. Этот шаг требует нежного прикосновения.
- Заостренной стороной вверх поднесите плату AHRS к длинной прямоугольной полосе сбоку материнской платы.
- Прижмите его к тому концу материнской платы, куда вы вставили предварительно запрограммированную SD-карту, убедившись, что плата полностью находится на выступающей полосе.
Когда вы закончите этот шаг, логотип Stratux должен быть направлен вверх, а самолет «улетает» от материнской платы.
Шаг 7
Использование двух гаечных ключей облегчает затяжку гаек.Далее устанавливаем пигтейлы в корпус.
- Сначала обратите внимание на резьбовой конец с резиновыми наконечниками.Вы должны увидеть гайку с двумя предохранительными/стопорными шайбами.
- Возьмите один косичку и снимите резиновые наконечники, гайку и одну шайбу с резьбового конца. Оставьте вторую шайбу.
- Вставьте резьбовой конец косички с оставленной шайбой в любое круглое отверстие на конце корпуса.
- Наденьте шайбу, затем гайку обратно на резьбовой конец, выступающий из корпуса.
- Затяните гайку пальцами до упора. Сделав это, используйте гаечный ключ, чтобы затянуть гайку до конца.
- На этом этапе мы заметили, что ключ на самом деле не затягивал гайку, а просто вращал косичку. Используйте второй ключ, чтобы удерживать гайку внутри корпуса на месте, затем завершите затяжку гайки снаружи корпуса.
- Повторите описанные выше действия с другой косичкой.
- После закрепления косичек сверните их в коробку таким образом, чтобы металлические концы находились на том же конце, что и порты USB.
Этап 8
Не помешает пометить ваши радиочипы, чтобы лучше отслеживать их.После того, как вы установили пигтейлы, вам нужно вставить радиочипы в порты USB. Наш радиочип на 978 МГц уже был помечен, но другой был пуст. Используя процесс исключения, мы смогли сделать вывод, что последний был радиочипом 1090 МГц.
- Перевернув материнскую плату правой стороной вверх, вставьте радиочип 978 МГц в правый верхний разъем USB.
- Вставьте радиочип 1090 МГц в верхний центральный порт USB.
Имейте в виду, что они будут буквально перевернуты, когда вы поместите материнскую плату в корпус.Это сделано для того, чтобы избежать путаницы при присоединении пигтейлов к радиочипам.
Шаг 9
Вентилятор подключен к датчику AHRS.Далее подключим вентилятор к только что установленной плате AHRS. Эта часть довольно сложна, так как может потребовать некоторой зрительно-моторной координации.
- Убедитесь, что сторона SD-карты на материнской плате обращена в том же направлении, что и встроенный вентилятор.
- Возьмите провода вентилятора за пластиковый конец, красный провод снаружи, и аккуратно наденьте пластиковый колпачок на штырьки на плате AHRS.
Соединение этих двух частей сейчас избавит вас от необходимости использовать свои логистические навыки при соединении косичек.
Шаг 10
Еще не совсем там.Теперь нужно поместить материнскую плату в корпус.
- Аккуратно положите материнскую плату «лицом вниз» в глубокую половину корпуса.
- Убедитесь, что GPYes направлен в противоположную сторону от вентилятора.
Материнская плата должна ровно лежать в корпусе.
Шаг 11
Убедитесь, что ваши радиоприемники и антенны совпадают!После того, как материнская плата будет ровно лежать в корпусе, вам нужно будет прикрепить пигтейлы к радиочипам.Не торопитесь с этой частью. Пришлось немного повозиться, и мы не хотели повредить материнскую плату или какие-либо ее части.
- Возьмите конец косички 1090 МГц.
- Обратите внимание на ручку, торчащую из кончика косички.
- Аккуратно вставьте ручку в отверстие на конце микросхемы 1090 МГц.
- Теперь повторите процесс с пигтейлом 978 МГц.
Бум! Вы закончили с материнской платой!
Шаг 12
Та-да!Мы на финишной прямой, все! Осталось только закрыть корпус и прикрутить антенны!
- Положите плоскую половину футляра поверх глубокой половины, убедившись, что она не загораживает боковые отверстия.
- Закрепите корпус с помощью винтов и отвертки, прилагаемых к корпусу.
- Возьмите две антенны с высоким коэффициентом усиления, которые входят в комплект антенн. Они оба должны быть помечены «1090» или «978» внизу.
- Привинтите антенны к соответствующим пигтейлам, торчащим из коробки.
Поздравляем! Вы только что построили свой собственный приемник ADS-B In!
Шаг 14
Теперь, когда ваш приемник готов, все, что вам нужно сделать, это закончить крепление окна.
- Вставьте маленькие стороны присосок в большие отверстия оконного крепления.
- Вставьте их в меньшие отверстия, чтобы они крепко держались.
- Возьмите новый самодельный приемник ADS-B и вставьте его в оконное крепление.
- Установите оконное крепление на свой самолет.
Теперь вам остается только наслаждаться своим новым приемником ADS-B и всеми его преимуществами!
Итог
Сборка приемника Stratux ADS-B не является ни сложной, ни запутанной.Список деталей минимален, и все необходимые инструменты включены в кейс Stratux.
Сборка приемника займет у вас около получаса. Вы, вероятно, сможете сделать это за меньшее время, если у вас есть некоторое представление о том, что вы делаете, предварительно прочитав инструкции.
EFB
Хотя все это звучит хорошо и хорошо, вам, вероятно, интересно, поддерживается ли приемник Stratux ADS-B вашей любимой электронной сумкой для полетов (EFB).
Ответ — большое старое «Наверное!».Приемник Stratux ADS-B дает вам:
- ADS-B Traffic
- ADS-B Weather
- AHRS
Более того, вы, скорее всего, сможете использовать его с вашим предпочтительным EFB.
Одно предостережение: Garmin не поддерживает ни одну из этих функций на приемнике Stratux ADS-B. Это связано с тем, что система Stratux имеет открытый исходный код и использует формат GDL90. Между тем, Garmin использует зашифрованный GDL39.
В любом случае, использование Stratux GDL90 делает их приемник ADS-B практически универсальным и способным работать практически с любым EFB.Однако некоторые EFB не поддерживают функцию AHRS, хотя они по-прежнему поддерживают функции ADS-B Traffic и ADS-B Weather.
Эти EFB:
- Avare EFB для Android
- AvPlan EFB для iOS и Android
- OzRunways EFB 5.4.2+ для iOS
- Последняя прошивка GRT Avionics для EFIS
Это может стать большим разочарованием для некоторых пилотов.
Для других отсутствие функции AHRS может быть лишь незначительным неудобством.Ваши более «серьезные» пилоты могут вообще отказаться от Statux и инвестировать в более совершенную и дорогую единицу.Другим может быть интересно возиться с новым гаджетом, например, со взрослым набором Lego.
Пилоты любят летать. Тем не менее, одним из самых привлекательных моментов для них является возможность запачкать руки и возиться со своей птицей. Если вы один из этих пилотов, то вам может подойти приемник Stratux ADS-B.
Итог
Приемник Stratux ADS-B, скорее всего, будет поддерживать предпочитаемый вами EFB. Хотя они практически универсальны, они не поддерживаются Garmin, а некоторые EFB не поддерживают функцию AHRS.
Это может быть несущественным для одних, неудобным для других и невыносимым для некоторых. При этом приемник ADS-B может подойти вам, если вы любите возиться.
Заключение
Приемник Stratux ADS-B представляет собой забавную маленькую хитроумную штуковину с большой мощностью и множеством функций.
Хотя ADS-B In не требуется в соответствии с мандатом FAA на ADS-B Out, он необходим для того, чтобы получить все преимущества новой технологии.Коммерческие приемники ADS-B могут стоить сотни долларов, если не тысячи.По необходимости Крис Янг основал Stratux, чтобы представить ADS-B In более широкой аудитории.
Детали для устройства очень дешевы, и их относительно легко найти. На сайте Stratux было несколько неработающих ссылок, но, похоже, они их исправили. При необходимости вы можете найти все детали по нашим ссылкам или немного покопавшись самостоятельно.
Набор можно собрать быстро и легко, особенно если вы потратите время на то, чтобы внимательно прочитать инструкции и заранее изучить картинки.
На момент написания этой статьи функции Stratux поддерживаются большинством EFB, за исключением Garmin. Существует также несколько EFB, которые не поддерживают функции AHRS.
Есть много вариантов для пилотов. Мы считаем, что приемник Stratux ADS-B должен быть одним из них.
 Вы просто возите его с собой в летной сумке вместе с гарнитурой, портативной радиостанцией и бортовыми журналами. Мы гарантируем, что ваш самодельный приемник ADS-B станет вашей новой любимой косметикой!
Вы просто возите его с собой в летной сумке вместе с гарнитурой, портативной радиостанцией и бортовыми журналами. Мы гарантируем, что ваш самодельный приемник ADS-B станет вашей новой любимой косметикой!
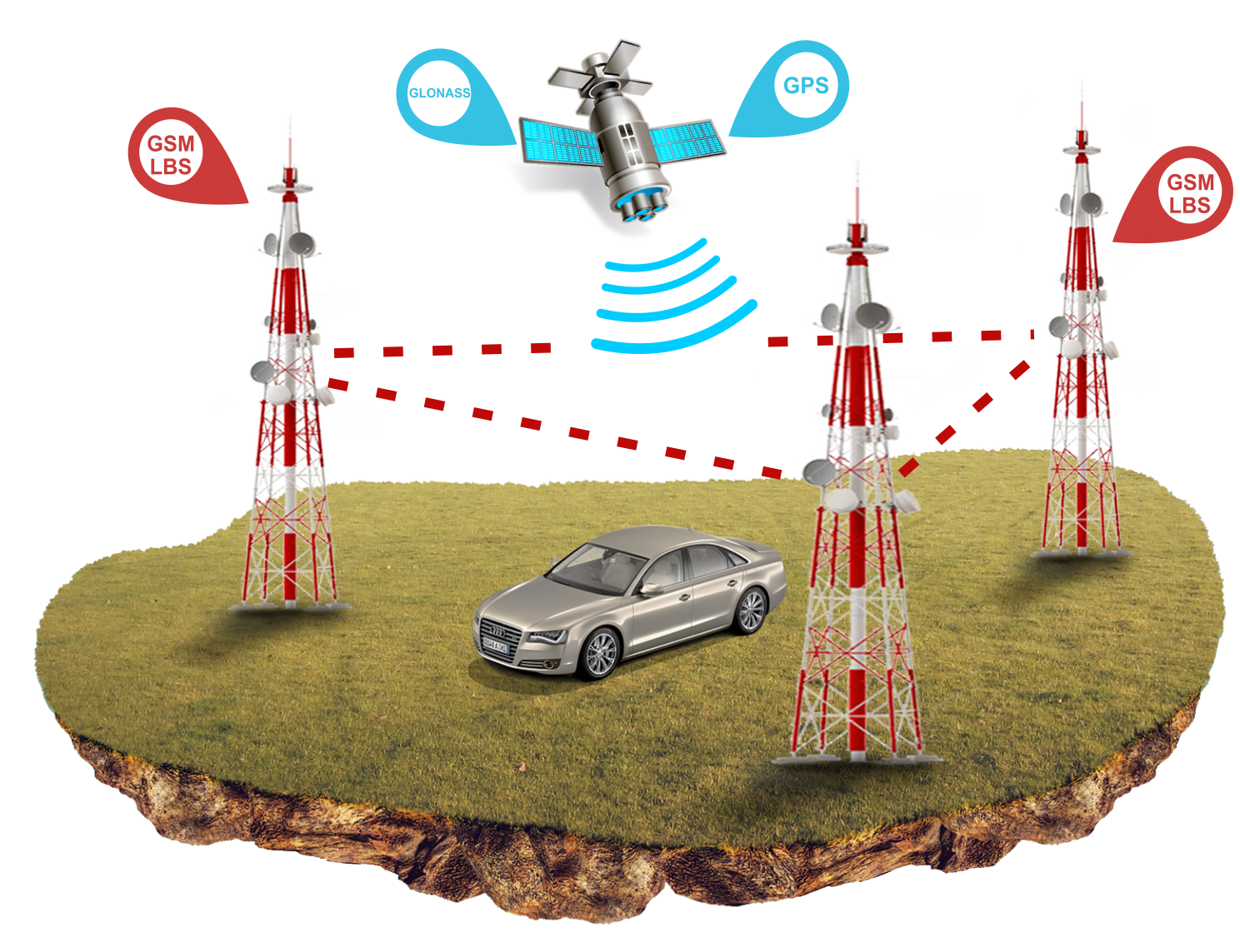 Вы можете заказать запчасти в пятницу, получить их все к следующей пятнице и уже к субботе летать с новым приемником ADS-B!
Вы можете заказать запчасти в пятницу, получить их все к следующей пятнице и уже к субботе летать с новым приемником ADS-B! К счастью, с тех пор они обновили его. Мы смогли найти еще один на Amazon, чтобы заказать то, что нам нужно. Используйте ссылку Amazon в качестве резервной копии на случай, если у Stratux возникнут дополнительные проблемы.
К счастью, с тех пор они обновили его. Мы смогли найти еще один на Amazon, чтобы заказать то, что нам нужно. Используйте ссылку Amazon в качестве резервной копии на случай, если у Stratux возникнут дополнительные проблемы.




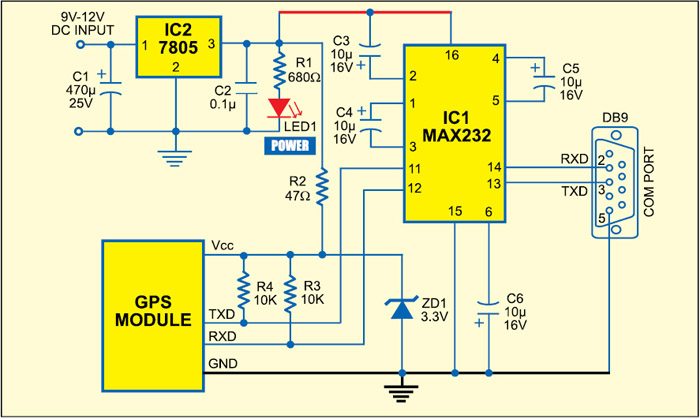


 Как вы заметили, в корпусе уже есть встроенный вентилятор.Вентилятор считается активным радиатором, поскольку он имеет движущиеся части. Это означает, что ваш новый приемник ADS-B имеет двойную теплозащиту!
Как вы заметили, в корпусе уже есть встроенный вентилятор.Вентилятор считается активным радиатором, поскольку он имеет движущиеся части. Это означает, что ваш новый приемник ADS-B имеет двойную теплозащиту!




 Ответ — большое старое «Наверное!».
Ответ — большое старое «Наверное!». Для других отсутствие функции AHRS может быть лишь незначительным неудобством.
Для других отсутствие функции AHRS может быть лишь незначительным неудобством. Хотя ADS-B In не требуется в соответствии с мандатом FAA на ADS-B Out, он необходим для того, чтобы получить все преимущества новой технологии.
Хотя ADS-B In не требуется в соответствии с мандатом FAA на ADS-B Out, он необходим для того, чтобы получить все преимущества новой технологии.