РЕГУЛЯТОР ОБОРОТОВ ДВИГАТЕЛЯ 12 В
Во многих электронных схемах используются системы активного охлаждения с вентиляторами. Чаще всего их моторы управляются микроконтроллером или другой специализированной микросхемой, а скорость вращения регулируется с помощью ШИМ. Такое решение характеризуется не слишком хорошей плавностью работы, может привести к нестабильной работе вентилятора, а кроме того, создает много помех.
Для потребностей высококачественной аудиотехники разработан аналоговый регулятор оборотов вентилятора. Схема пригодится при строительстве усилителей НЧ с активной системой охлаждения и позволяет выполнить плавную регулировку оборотов вентиляторов в зависимости от температуры. Производительность и мощность зависит в основном от выходного транзистора, тесты проводились с выходными токами до 2 А, что позволяет подключить даже несколько больших вентиляторов на 12 В. Естественно можно применить это устройство и для управления обычными моторами постоянного тока, при необходимости повысив питающее напряжение.
Принципиальная схема регулятора оборотов мотора
Схема состоит из двух частей: дифференциального усилителя и стабилизатора напряжения. Первая часть занимается измерением температуры и обеспечивает напряжение, пропорциональное температуре, когда она превышает установленный порог. Это напряжение является управляющим для стабилизатора напряжения, выход которого контролирует питание вентиляторов.
Схема регулятора оборотов электродвигателя постоянного тока приведена на рисунке. Основа — компаратор U2 (LM393), работающий в этой конфигурации как обычный операционный усилитель. Первая его часть U2A работает как усилитель дифференциальный, чьи условия работы определяют резисторы R4-R5 (47k) и R6-R7 (220k). Конденсатор C10 (22pF) улучшает стабильность усилителя, а R12 (10k) подтягивает выход компаратора к плюсу питания.
На один из входов дифференциального усилителя подается напряжение, которое образуется через делитель, состоящий из R2 (6,8k), R3 (680 Ом) и PR1 (500 Ом), и фильтруется с помощью C4 (100nF). На второй вход этого усилителя поступает напряжение с датчика температуры, который в данном случае один из разъемов транзистора T1 (BD139), поляризованный небольшим током с помощью R1 (6,8k).
На второй вход этого усилителя поступает напряжение с датчика температуры, который в данном случае один из разъемов транзистора T1 (BD139), поляризованный небольшим током с помощью R1 (6,8k).
Конденсатор C2 (100nF) был добавлен, чтобы фильтровать напряжение с датчика температуры. Полярность датчика и делителя опорного напряжения задает стабилизатор U1 (78L05) вместе с конденсаторами C1 (1000uF/16V), C3 (100nF) и C5 (47uF/25V), предоставляя стабилизированное напряжение 5 В.
Компаратор U2B работает как классический усилитель ошибки. Он сравнивает напряжение с выхода дифференциального усилителя с выходным напряжением с помощью цепочки R10 (3,3k), R11 (47 Ом) и PR2 (200 Ом). Исполнительным элементом стабилизатора является транзистор T2 (IRF5305), база которого управляется делителем R8 (10k) и R9 (5,1k).
Конденсатор C6 (1uF) и C7 (22pF) и C9 (10nF) улучшают стабильность петли обратной связи. Конденсатор C8 (1000uF/16V) фильтрует выходное напряжение, он имеет значительное влияние на стабильность системы. Разъемом выхода — AR2 (TB2), а разъем питания — AR1 (TB2).
Разъемом выхода — AR2 (TB2), а разъем питания — AR1 (TB2).
Благодаря применению выходного транзистора с низким сопротивлением в открытом состоянии, схема обладает очень малым падением напряжения — порядка 50 мВ при выходном токе 1 А, что не требует блока питания с более высоким напряжением для управления вентиляторами, работающие на 12 В.
В большинстве случаев в роли U2 можно применить популярный операционный усилитель LM358, правда несколько ухудшив выходные параметры.
Сборка регулятора
Монтаж следует начинать с установки двух перемычек, затем должны быть установлены все резисторы и мелкие керамические конденсаторы.Далее устанавливаем переменные резисторы, стабилизатор и все разъемы, заканчивая большими электролитическими конденсаторами. Транзисторы T1 и T2 оставляем на самый конец.
В большинстве случаев оба эти элемента будут установлены снизу платы на ножках, изогнутых под углом 90 градусов. Такая укладка позволит их прикрутить непосредственно к радиатору (обязательно использовать изоляционные прокладки).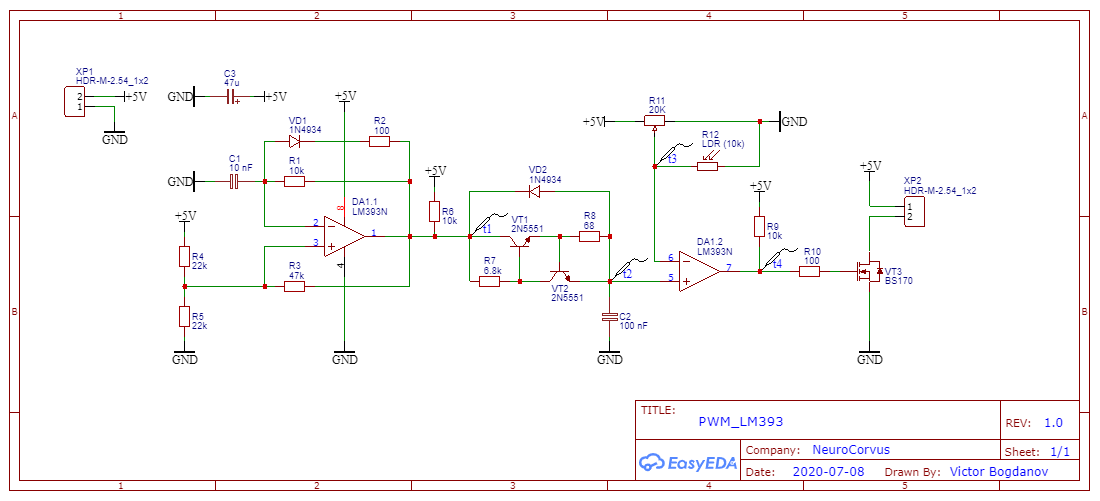
Форум
Форум по обсуждению материала РЕГУЛЯТОР ОБОРОТОВ ДВИГАТЕЛЯ 12 В
| |||
| |||
Регулятор оборотов минидрели / Хабр
Сверление печатных плат — настоящая головная боль для электронщика, но наше новое устройство поможет ее немного смягчить. Это простое и компактное дополнение к минидрели позволит продлить жизнь двигателю и сверлам. Схема, плата, инструкции по настройке, видео — все в статье!
Схема, плата, инструкции по настройке, видео — все в статье!
Для чего нужен регулятор оборотов
Обычно минидрели строятся на базе обычных двигателей постоянного тока. А обороты таких двигателей зависят от нагрузки и приложенного напряжения. В результате на холостых оборотах двигатель раскручивается очень сильно, а в моменты сверления обороты двигателя плавают в большом диапазоне.
Если снижать напряжение на двигателе, когда не нем нет нагрузки, можно добиться увеличения ресурса как свёрл, так и самих двигателей. Кроме того, даже точность сверления повышается. Самый простой способ добиться этого — измерение тока, потребляемого двигателем.
В интернете много схем подобных регуляторов, но большинство из них используют линейные регуляторы напряжения. Они массивные и требуют охлаждения. В соавторстве с TinyElectronicFriends нам захотелось сделать компактную плату на базе импульсного стабилизатора, чтобы она могла быть просто «надета» на двигатель.
Схема
ШИМ-регулятор со встроенным ключом MC34063 регулирует напряжение на двигателе. Напряжение на шунте R7,R9,R11 усиливается операционным усилителем и через компаратор подается на вход обратной связи ШИМ-контроллера.
Напряжение на шунте R7,R9,R11 усиливается операционным усилителем и через компаратор подается на вход обратной связи ШИМ-контроллера.
Если ток меньше определенного значения, то на двигатель подается напряжение, зависящее от настройки сопротивления RV1. То есть на холостых оборотах на двигатель будет подаваться только часть мощности, а подстроечный резистор RV1 позволит отрегулировать обороты при этом.
Если сигнал на выходе ОУ превысит напряжение на компараторе, то на двигатель будет подано полное напряжение питания. То есть при сверлении двигатель будет включаться на максимальную мощность. Порог включения задается резистором RV2.
Все компоненты схемы будут рассеивать очень мало тепла и можно собрать ее полностью на SMD-компонентах. Работать она может при большом диапазоне питающих напряжений (в зависимости от сопротивления R6), не требует контроллеров и датчиков оборотов.
Печатная плата
Вся схема умещается на двухсторонней печатной плате диаметром 30мм. На ней всего несколько штук переходных отверстий и ее легко можно изготовить «в домашних условиях». Ниже в статье будут файлы для скачивания файла печатной платы для SprintLaout.
На ней всего несколько штук переходных отверстий и ее легко можно изготовить «в домашних условиях». Ниже в статье будут файлы для скачивания файла печатной платы для SprintLaout.
Перечень компонентов
Вот полный список всего, что потребуется для сборки:
- Печатная плата (ссылка на файлы для изготовления в конце статьи)
- U1 — MC34063AD, импульсный стабилизатор, SOIC-8
- U2 — LM358, операционный усилитель, SOIC-8
- U3 — L78L09, стабилизатор, SOT-89
- D1,D3 — SS14, диод Шоттки, SMA — 2шт
- D2 — LL4148, диод выпрямительный, MiniMELF
- C1 — конденсатор, 10мкФ, 50В, 1210
- C2 — конденсатор, 3.3нФ, 1206
- C3,C4 — конденсатор, 4.7мкФ, 1206 — 2шт
- C5 — конденсатор, 22мкФ, 1206
- R1-R3,R7,R9,R11 — резистор 1 Ом, 1206 — 6шт
- R4,R10 — резистор 22кОм, 1206 — 2шт
- R5 — резистор 1кОм, 1206
- R6 — резистор 10-27кОм, 1206.
 Сопротивление зависит от номинального напряжения используемого двигателя. 12В — 10кОм, 24В — 18кОм, 27В — 22кОм, 36В — 27кОм
Сопротивление зависит от номинального напряжения используемого двигателя. 12В — 10кОм, 24В — 18кОм, 27В — 22кОм, 36В — 27кОм - R8 — резистор 390 Ом, 1206
- RV1,RV2 — резистор подстрочный, 15кОм, типа 3224W-1-153 — 2шт
 Сопротивление зависит от номинального напряжения используемого двигателя. 12В — 10кОм, 24В — 18кОм, 27В — 22кОм, 36В — 27кОм
Сопротивление зависит от номинального напряжения используемого двигателя. 12В — 10кОм, 24В — 18кОм, 27В — 22кОм, 36В — 27кОмТакже мы сделали на 3D-принтере кольцо-ограничитель, для удобной установки на двигатель. Ссылка для скачивания STL-файла для скачивания в конце статьи.
Сборка и настройка
Собирается все достаточно просто. Контактные площадки нарисованы под ручную пайку.
Стоит начинать сборку самой платы с установки всех компонентов на стороне платы без подстроечных резисторов, а затем на обратной стороне. Клемму проще устанавливать в последнюю очередь. Номинал R6 подбирается в соответствии с номинальным напряжением вашего двигателя. В этом устройстве важно контролировать положение ключа на микросхемах и полярность диодов. Все остальные компоненты не полярные.
Между платой и двигателем над установить проставку, чтобы плата не касалась двигателя. Сама плата надевается прямо на ламели двигателя. Несколько раз проверьте полярность подключения двигателя, чтобы он крутился в правую сторону, а затем припаяйте контакты.
Сама плата надевается прямо на ламели двигателя. Несколько раз проверьте полярность подключения двигателя, чтобы он крутился в правую сторону, а затем припаяйте контакты.
Контакты для подачи напряжения, на вход платы подписаны «GND» и «+36V». Минус источника входного напряжения подключается к контакту «GND», а плюс к «+36V». Напряжение источника питания должно совпадать с номинальным напряжением двигателя.
Настройка регулятора очень проста:
- Установить резистором RV2 порог срабатывания регулятора на максимум
- Установить резистором RV1 оптимальные обороты двигателя в режиме холостого хода
- Установить резистором RV2 такой порог срабатывания, чтобы при появлении малейшей нагрузки, увеличивалось напряжение на двигателе
Видео
Эффект от использования сложно оценить по видео, но мы теперь всегда сверлим только с регулятором! Требуется лишь немного привыкнуть и следить чтобы сверла были хорошо заточены. И, конечно, его можно в любой момент просто включить на максимум на всегда.
Ссылки
Ссылки для скачивания всех необходимых файлов вы можете найти на
основной странице проекта.
Спасибо за проявленный интерес!
RDC2-0024, Одноканальный ШИМ регулятор мощности, Электронные войска
Описание
Модуль предназначен для плавной регулировки напряжения постоянного тока. Регулировка производится потенциометром, расположенном на плате. В отличии от обычных ШИМ регуляторов напряжения в модуле RDC2-0024 кроме изменения скважности импульсов также можно менять частоту импульсов, причем в очень широких пределах — от 300 Гц до 96 кГц. Это может пригодится для полного уменьшения влияния помех в зоне работы регулятора, например в бортовой сети автомобиля или для плавного, без мерцания регулирования мощных светодиодных прожекторов. А может в ваших лабораторных экспериментах, например с двигателями постоянного тока.
Широкий диапазон регулируемых напряжений (до 100В) позволяет использовать регулятор в большей линейке стандартных бортовых напряжений (12В, 24В, 48В …)
Особенно перспективным будет использование модуля в качестве регулятора яркости мощных LED лент, светодиодных ламп и прожекторов.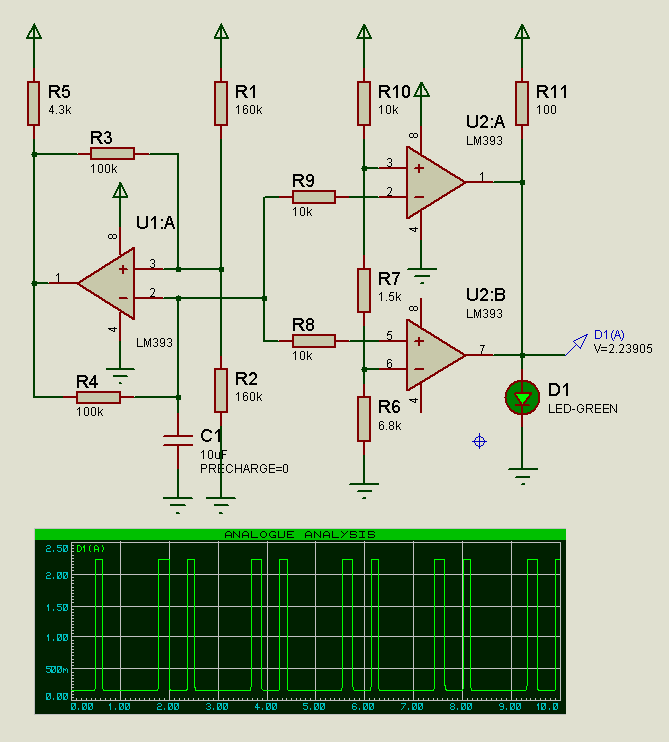 Напряжение питания последних обычно составляет от 30 до 60В.
Напряжение питания последних обычно составляет от 30 до 60В.
Характеристики:
Напряжение питания: 5 – 40 В
Максимальный ток: 5,6 A
Количество каналов ШИМ: 1
Изменение длительности импульса: 0…100 %
Шаг регулировки длительности импульса: 1 %
Частота ШИМ-сигнала: 24 значения от 300 Гц до 96 кГц
Сохранение настроек в энергонезависимой памяти: да
Установленные силовые ключи: 1
Независимое питание нагрузки каждого канала: да
Для управления внешним силовым ключом доступен логический сигнал ШИМ: напряжение 3,3 В. XP3 максимальный выходной ток 3 мА
Схема
Назначение разъемов и подключение нагрузок
Устройство не является генератором, оно регулятор. Микроконтроллер управляет затвором транзистора, открытый сток выведен для подключения нагрузки.
Например, нужно управлять яркостью лампы накаливания. Максимальная яркость (100%) при напряжении 24 В. Подключаем лампу по схеме, подавая на Vload 24 В. Выставляем резистором на индикаторе значение 50 — значит на лампе напряжение 50% от 24 В, т. е. 12 В, она светится с яркостью 50 %. Кнопкой устанавливается частота ШИМ-сигнала регулирования.
е. 12 В, она светится с яркостью 50 %. Кнопкой устанавливается частота ШИМ-сигнала регулирования.
У модуля раздельная подача напряжение для самого модуля и для нагрузки, которое регулируется: контакты +Vin, GND — для питания самого модуля; контакты Vload, Rn, GND — для подключения нагрузки.
Это открытый проект! Лицензия, под которой он распространяется – Creative Commons — Attribution — Share Alike license.
Технические параметры
| Количество каналов | 1 |
| Максимальный ток,А | 5.6 |
| Максимальное напряжение,В | 200 |
| Вид напряжения | DC |
| Регулирующий элемент | n-channel mosfet |
| Вес, г | 35.4 |
Техническая документация
Широтно-импульсный модулятор работает при различных
Аннотация: Создайте широтно-импульсный модулятор общего назначения, используя три операционных усилителя из устройства с четырьмя операционными усилителями.
Рис. 1. Эта схема с 3 операционными усилителями формирует треугольную волну и имеет выходной сигнал с переменной шириной импульса.
Схема состоит из генератора треугольных импульсов (U1A и U1B) и компаратора (U1C). U1A настроен как интегратор (или деинтегратор), а U1B как компаратор с гистерезисом. При включении питания выходное напряжение компаратора считается равным нулю.
Неинвертирующий вход U1A имеет смещение VCC/2.Виртуальное соединение между инвертирующим и неинвертирующим входами обеспечивает постоянный ток через R, равный I = Vcc/2R, который заряжает конденсатор C. Таким образом, выходной сигнал интегратора U1A линейно увеличивается со временем. Когда оно достигает 0,75VCC, выход компаратора (U1B) изменяется на максимальное выходное напряжение (VCC). В этот момент интегратор начинает разрушаться, что приводит к линейному уменьшению выходного напряжения. Когда оно достигает 0,25 В, выходное напряжение компаратора становится равным нулю, и цикл повторяется.Таким образом, выходной сигнал интегратора представляет собой треугольную волну, которая колеблется между уровнями ¼VCC и ¾VCC.
U1C сравнивает треугольную волну с уровнем постоянного тока VIN. Его выход представляет собой прямоугольную волну с рабочим циклом, который изменяется от 0% до 100%, поскольку VIN изменяется от ¼ VCC до ¾ VCC (, рис. 2, ). Частота определяется R, C, R 1 и R 2 :
Рис. 2. Схема, показанная на рис. 1, формирует выходные сигналы ШИМ и треугольной формы.
2. Схема, показанная на рис. 1, формирует выходные сигналы ШИМ и треугольной формы.
Соотношение R 2 и R 1 влияет на рабочую частоту и амплитуду треугольной волны. Учитывая, что V TH — максимальное напряжение треугольной волны, а V TL — минимальное напряжение, размах амплитуды равен:
Пиковое напряжение треугольной волны (разность ее максимального и минимального напряжений) сосредоточено на напряжении смещения VCC/2, генерируемом R 3 и R 4 .Показанная конфигурация схемы позволяет ШИМ работать от одного источника питания. Используйте микромощные операционные усилители и резисторы большего размера (R и R 1 — R 4 ) для маломощных приложений и высокочастотные операционные усилители для высокочастотных приложений. (Изображенный счетверенный операционный усилитель поставляется в одном корпусе.)
© , Максим Интегрейтед Продактс, Инк.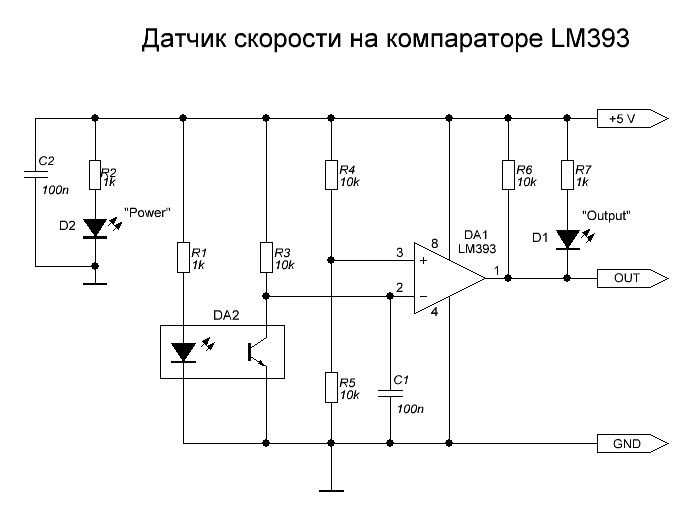 |
| ПРИЛОЖЕНИЕ 3201: ПРИМЕЧАНИЕ ПО ПРИМЕНЕНИЮ 3201, АН3201, АН 3201, АРР3201, Приложение3201, Приложение 3201 |
maxim_web:en/products/analog/amps
maxim_web:en/products/analog/amps
LM393 5V 1Bit Компаратор напряжения Singal Channel Relay Control Circuit Module
1.Описание:
Это модуль компаратора напряжения постоянного тока 5 В 1 бит.Он контролирует состояние выхода реле, сравнивая два напряжения.
2.Особенности:
1>. Устанавливаемое опорное напряжение
2>. Входы могут быть выбраны один или два
3>. Три варианта функции
4>.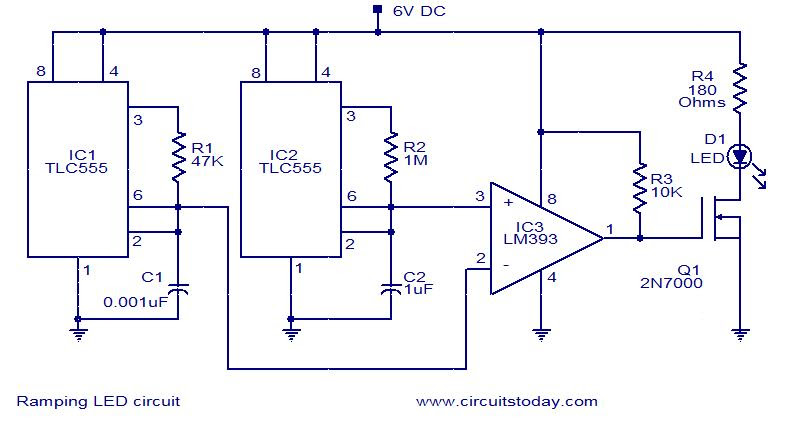 Выход управления реле
Выход управления реле
3.Параметры:
1>. Рабочее напряжение: DC5V
2>.Рабочий ток: 5 мА
3>. Ток в режиме ожидания: 5 мкА
4>. Рабочая температура: -20 ℃ ~ 85 ℃
5>. Рабочая влажность: 5% ~ 95% относительной влажности
6>. Размер модуля: 63*38*19 мм
4. Функции:
1>. Функция_1: Сравните входное напряжение и опорное напряжение. Опорное напряжение можно установить с помощью потенциометра. Релейный выход включится, если входное напряжение больше опорного напряжения.Релейный выход выключится, если входное напряжение меньше опорного напряжения.
2>. Функция_2: Сравните входное напряжение A и входное напряжение B. Релейный выход включится, если входное напряжение A больше, чем входное напряжение B. Релейный выход выключится, если входное напряжение A меньше входного напряжения. Б.
3>. Функция_3: Сравните входное напряжение и опорное напряжение. Ее функция противоположна функции_1. Для этой функции необходимо снять заглушку с модуля и короткие контактные площадки на задней стороне печатной платы.Опорное напряжение можно установить с помощью потенциометра. Релейный выход включается, если входное напряжение меньше опорного напряжения. Релейный выход выключается, если входное напряжение больше опорного напряжения.
Ее функция противоположна функции_1. Для этой функции необходимо снять заглушку с модуля и короткие контактные площадки на задней стороне печатной платы.Опорное напряжение можно установить с помощью потенциометра. Релейный выход включается, если входное напряжение меньше опорного напряжения. Релейный выход выключается, если входное напряжение больше опорного напряжения.
4>. Отрегулируйте опорное напряжение: оно зависит от рабочего напряжения модуля. Его диапазон регулировки составляет 0 ~ 5 В.
5. Применение:
1>. Модификация автомобильной схемы
2>.Промышленное оборудование
3>.Тестовый тест
4>. Проверка приложения цепи
6.Пакет:
1шт LM393 5V 1CH компаратор напряжения
Во-первых, мы должны сказать, что ICStation не принимает никаких форм оплаты при доставке. Раньше товары отправлялись после получения информации о заказе и оплаты.
1) Платеж Paypal
PayPal — это безопасная и надежная служба обработки платежей, позволяющая совершать покупки в Интернете.PayPal можно использовать на icstation.com для покупки товаров с помощью кредитной карты (Visa, MasterCard, Discover и American Express), дебетовой карты или электронного чека (т. е. с использованием вашего обычного банковского счета).
Мы прошли проверку PayPal
2) Вест Юнион
Мы знаем, что у некоторых из вас нет учетной записи Paypal.
Но, пожалуйста, успокойся. Вы можете использовать способ оплаты West Union.
Чтобы получить информацию о получателе, свяжитесь с нами по адресу [email protected].
3) Банковский перевод/банковский перевод/T/T
Способы оплаты банковским переводом / банковским переводом / T / T принимаются для заказов, общая стоимость которых составляет до 500 долларов США . Банк взимает около 60 долларов США за комиссию за перевод, если мы осуществляем платеж этими способами.
Банк взимает около 60 долларов США за комиссию за перевод, если мы осуществляем платеж этими способами.
Чтобы узнать о другом способе оплаты, свяжитесь с нами по адресу orders@icstation.(с бесплатным номером отслеживания и платой за страхование доставки)
(2) Время доставки
Время доставки в большинство стран составляет 7-20 рабочих дней; Пожалуйста, просмотрите таблицу ниже, чтобы узнать точное время доставки в ваше местоположение.
7-15 рабочих дней в: большинство стран Азии
10-16 рабочих дней в: США, Канаду, Австралию, Великобританию, большинство стран Европы
13-20 рабочих дней в: Германию, Россию
18-25 рабочих дней в: Францию, Италию, Испанию, Южную Африку
20-45 рабочих дней в: Бразилию, большинство стран Южной Америки
2.DHL/FedEx Express
(1) Плата за доставку: Бесплатно для заказа, соответствующего следующим требованиям
Общая стоимость заказа >= 200 долларов США или Общий вес заказа >= 2,2 кг
При заказе соответствует одному из вышеуказанных требований, он будет отправлен БЕСПЛАТНО через EMS/DHL/UPS Express в нижеуказанную страну.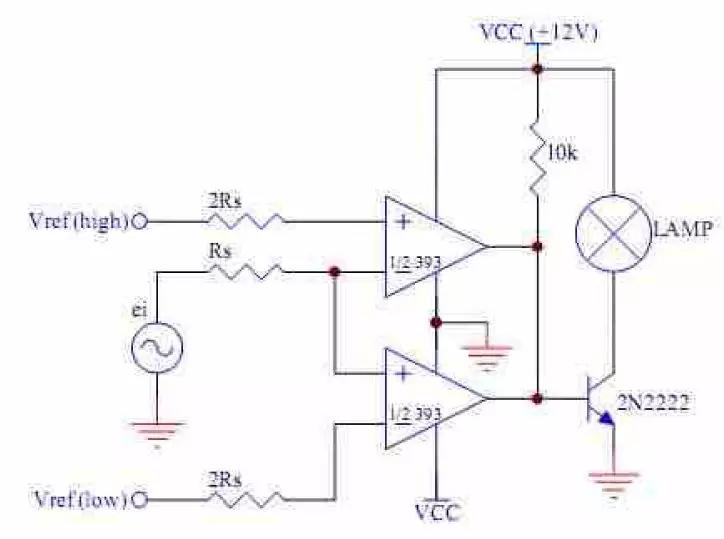
Азия: Япония, Южная Корея, Монголия. Малайзия, Сингапур, Таиланд, Вьетнам, Камбоджа, Индонезия, Филиппины
Океания: Австралия, Новая Зеландия, Папуа-Новая Гвинея
Европа и Америка: Бельгия, Великобритания, Дания, Финляндия, Греция, Ирландия, Италия, Люксембург, Мальта, Норвегия, Португалия, Швейцария, Германия, Швеция, Франция, Испания, США, Австрия, Канада
Примечание. Стоимость доставки в другие страны уточняйте по адресу [email protected]
(2) Время доставки и время доставки
Срок доставки: 1-3 дня
Срок доставки: 5-10 рабочих дней (около 1-2 недель) в большинство стран.
Поскольку посылка будет возвращена отправителю, если она не была подписана получателем, обратите внимание на время прибытия посылки.
Примечание:
1) Адреса APO и абонентских ящиков
Настоятельно рекомендуем указывать физический адрес для доставки заказа.
Потому что DHL и FedEx не могут доставлять товары на адреса APO или PO BOX.
2) Контактный телефон
Контактный телефон получателя необходим агентству экспресс-доставки для доставки посылки. Пожалуйста, сообщите нам свой последний номер телефона.
3. Примечание
1) Время доставки смешанных заказов с товарами с разным статусом доставки должно рассчитываться с использованием максимального указанного времени.
2) Напоминание о китайских праздниках: во время ежегодных китайских праздников могут быть затронуты услуги некоторых поставщиков и перевозчиков, а доставка заказов, размещенных примерно в следующее время, может быть задержана на 3–7 дней: китайский Новый год; Национальный день Китая и т. д.
3) Как только ваш заказ будет отправлен, вы получите уведомление по электронной почте от icstation.com
4) Отслеживайте заказ с помощью номера отслеживания по ссылкам ниже:
Цепь контроллера охлаждающего вентилятора, активируемого теплом, с датчиком температуры LM393-LM358 и LM35
Контроллер охлаждающего вентилятора, активируемый теплом (цепь привода охлаждающего вентилятора, активируемого теплом), представляет собой простой проект, который управляет бесколлекторным вентилятором, когда температура в определенной области превышает заданное значение, когда температура возвращается к нормальной, вентилятор автоматически выключается. Проект построен с использованием операционного усилителя LM358 (вместо него используйте LM393 для хорошей производительности) и датчика температуры LM35. Проект требует источника питания 12 В постоянного тока и может управлять вентилятором 12 В. Этот проект полезен в таких приложениях, как контроллер температуры радиатора, ПК, термочувствительное оборудование, источник питания, аудиоусилители, зарядные устройства, духовка.
Проект построен с использованием операционного усилителя LM358 (вместо него используйте LM393 для хорошей производительности) и датчика температуры LM35. Проект требует источника питания 12 В постоянного тока и может управлять вентилятором 12 В. Этот проект полезен в таких приложениях, как контроллер температуры радиатора, ПК, термочувствительное оборудование, источник питания, аудиоусилители, зарядные устройства, духовка.
SMD SO8 LM35, используемый в качестве датчика температуры, LM358 действует как компаратор, обеспечивает высокий выходной сигнал, когда температура поднимается выше заданного значения, высокий выходной сигнал управляет транзистором привода вентилятора.Серия LM35 представляет собой прецизионные датчики температуры с интегральной схемой, выходное напряжение которых линейно пропорционально температуре по Цельсию. Преимущество устройства LM35 перед линейными датчиками температуры, откалиброванными в градусах Кельвина, заключается в том, что пользователю не требуется вычитать большое постоянное напряжение из выходного сигнала для получения удобной шкалы по Цельсию. Устройство LM35 не требует какой-либо внешней калибровки или подстройки для обеспечения типичной точности ±¼°C при комнатной температуре. Диапазон измерения температуры от 2 до 150 градусов по Цельсию.LM35 обеспечивает выход 10 мВ/градус Цельсия.
Устройство LM35 не требует какой-либо внешней калибровки или подстройки для обеспечения типичной точности ±¼°C при комнатной температуре. Диапазон измерения температуры от 2 до 150 градусов по Цельсию.LM35 обеспечивает выход 10 мВ/градус Цельсия.
ПРИМЕЧАНИЕ: Рекомендуется использовать компаратор LM393 вместо LM358, так как он обеспечивает лучшие результаты.
- Питание 12 В пост. тока, 1 А
- Вентилятор 12 В пост. тока, 500 мА
- Диапазон: от 2 °C до 150 °C
- Выход с открытым коллектором
- Может управлять вентилятором ПК
- Встроенная предустановка для установки уровня срабатывания вентилятора
- Встроенный индикатор питания
- Индикатор встроенного выхода
- Транзистор выходного драйвера
- Соединитель коллектора для подачи и вентилятора
- Размеры печатной платы 59. 85 мм x 12,70 мм
 85 мм x 12,70 мм
85 мм x 12,70 мм Посмотреть видео проекта можно здесь
Датчик температуры LM35
Серия LM35 представляет собой прецизионные датчики температуры со интегральными схемами, выходное напряжение которых линейно пропорционально температуре по Цельсию.Преимущество устройства LM35 перед линейными датчиками температуры, откалиброванными в градусах Кельвина, заключается в том, что пользователю не требуется вычитать большое постоянное напряжение из выходного сигнала для получения удобной шкалы по Цельсию. Устройство LM35 не требует какой-либо внешней калибровки или подстройки для обеспечения типичной точности ±¼°C при комнатной температуре и ±¾°C во всем диапазоне температур от −55°C до 150°C. Более низкая стоимость обеспечивается обрезкой и калибровкой на уровне пластины. Низкий выходной импеданс, линейный выход и точная встроенная калибровка устройства LM35 делают взаимодействие со схемами считывания или управления особенно простыми.Устройство используется с одиночными источниками питания или с плюсовыми и минусовыми источниками питания. Поскольку устройство LM35 потребляет всего 60 мкА от источника питания, оно имеет очень низкий самонагрев — менее 0,1 °C в неподвижном воздухе. Устройство LM35 рассчитано на работу в диапазоне температур от -55°C до 150°C, а устройство LM35C рассчитано на диапазон от -40°C до 110°C (-10° с повышенной точностью). Устройства серии LM35 доступны в герметичных корпусах транзисторов TO, а устройства LM35C, LM35CA и LM35D доступны в пластиковых корпусах транзисторов TO-92.Устройство LM35D доступно в 8-выводном малогабаритном корпусе для поверхностного монтажа и в пластиковом корпусе TO-220.
Низкий выходной импеданс, линейный выход и точная встроенная калибровка устройства LM35 делают взаимодействие со схемами считывания или управления особенно простыми.Устройство используется с одиночными источниками питания или с плюсовыми и минусовыми источниками питания. Поскольку устройство LM35 потребляет всего 60 мкА от источника питания, оно имеет очень низкий самонагрев — менее 0,1 °C в неподвижном воздухе. Устройство LM35 рассчитано на работу в диапазоне температур от -55°C до 150°C, а устройство LM35C рассчитано на диапазон от -40°C до 110°C (-10° с повышенной точностью). Устройства серии LM35 доступны в герметичных корпусах транзисторов TO, а устройства LM35C, LM35CA и LM35D доступны в пластиковых корпусах транзисторов TO-92.Устройство LM35D доступно в 8-выводном малогабаритном корпусе для поверхностного монтажа и в пластиковом корпусе TO-220.
Операционный усилитель LM358
Эти устройства состоят из двух независимых операционных усилителей с частотной компенсацией и высоким коэффициентом усиления, предназначенных для работы от одного или раздельного источника питания в широком диапазоне напряжений.
Компаратор LM393
Эти устройства состоят из двух независимых компараторов напряжения, предназначенных для работы от одного источника питания в широком диапазоне напряжений.Работа от двух источников питания также возможна, если разница между двумя источниками питания составляет от 2 до 36 В, а VCC как минимум на 1,5 В больше, чем входное синфазное напряжение. Потребляемый ток не зависит от напряжения питания. Выходы могут быть подключены к другим выходам с открытым коллектором для достижения взаимосвязи проводного И.
Устройства LM293A рассчитаны на работу в диапазоне температур от −25°C до +85°C. Устройства LM393 и LM393A рассчитаны на работу в диапазоне температур от 0°C до 70°C.LM2903, LM2903V,
Сиден блев икке фундет — FitnessNow.dk
- Блив медлем
- Блив ныт медлем
- Блив инструктор
- Бливворес нью трэнер
- Мой инструктор
- Aftalevilkår для инструктора
- Блоги
- Тренировка
- Демонстрация тренировок
- Тренировочное видео
- Обучение для всех
- Йога
- Тренировочный медицинский результат
- Обучение работе с вельветом
- Профиль
- Медлемскаб
- Крышка os
- Выбор для FitnessNow и YogaNow?
- Партнерскаб
- Контакт ОС
- Приборная панель
- Логин
- Блив медлем
- Блив ныт медлем
- Блив инструктор
- Бливворес нью трэнер
- Мой инструктор
- Aftalevilkår для инструктора
- Блоги
- Тренировка
- Демонстрация тренировок
- Тренировочное видео
- Обучение для всех
- Йога
- Тренировочный медицинский результат
- Обучение работе с вельветом
- Профиль
- Медлемскаб
- Крышка от ос
- Выбор для FitnessNow и YogaNow?
- Партнерскаб
- Контакт ОС
- Приборная панель
- Логин
Как ты сюда попал?
Ищи: Вернуться домой сопровождение в Стамбуле — сопровождение в Стамбуле — сопровождение в Стамбуле — сопровождение в Стамбуле — сопровождение в Стамбуле — сопровождение в Стамбуле — сопровождение в Стамбуле — сопровождение в Стамбуле — сопровождение в Стамбуле — сопровождение в Стамбуле — сопровождение в Стамбуле — сопровождение в Стамбуле — сопровождение в Стамбуле — сопровождение в Стамбуле — сопровождение в Стамбуле — сопровождение в Стамбуле — сопровождение в Стамбуле — сопровождение в Стамбуле — сопровождение в Стамбуле — сопровождение в Стамбуле — сопровождение в Стамбуле — сопровождение в Стамбуле — сопровождение в Стамбуле — сопровождение в Стамбуле — сопровождение в Стамбуле — сопровождение в Стамбуле — сопровождение в Стамбуле — сопровождение в Стамбуле — сопровождение в Стамбуле — сопровождение в Стамбуле — сопровождение в Стамбуле — сопровождение в Стамбуле сопровождение — сопровождение в Стамбуле — сопровождение в Стамбуле — сопровождение в Стамбуле — сопровождение в Стамбуле — сопровождение в Стамбуле — сопровождение в Стамбуле — сопровождение в Стамбуле — сопровождение в Стамбуле — сопровождение в Стамбуле — сопровождение в Стамбуле — сопровождение в Стамбуле — сопровождение в Дубае — сопровождение в Дубае — сопровождение в Дубае — сопровождение в Дубае — сопровождение в Дубае Дубай эскорт — Бакыркой эскорт — Бакыркой эскорт — Бакыркой эскорт — Бакыркой эскорт — Бакыркой эскорт — Бакыркой ЭСК орт — Bakırköy сопровождение — Bakırköy сопровождение — beylikdüzü сопровождение — beylikdüzü сопровождение — beylikdüzü сопровождение — beylikdüzü сопровождение — beylikdüzü сопровождение — beylikdüzü сопровождение — beylikdüzü сопровождение — beylikdüzü сопровождение — Sirinevler сопровождение — Sirinevler сопровождение — Sirinevler сопровождение — Sirinevler сопровождение — Sirinevler сопровождение — Sirinevler сопровождение — şirinevler Escort — şirinevler Escort — Ataköy Escort — Ataköy Escort — Ataköy Escort — Ataköy Escort — Ataköy Escort — Ataköy Escort — Ataköy Escort — Ataköy Escort — Escort — Escort — Escort — aşişli Escort — aşişli Escort — işli Escort — şişli эскорт — mecidiyeköy эскорт — mecidiyeköy эскорт — mecidiyeköy эскорт — mecidiyeköy эскорт — mecidiyeköy эскорт — mecidiyeköy эскорт — mecidiyeköy эскорт — mecidiyeköy эскортКонтроль и измерение скорости двигателя постоянного тока
При проверке скорости двигателя постоянного тока к двигателю применяется ШИМ, и его рабочий цикл изменяется от мин. до макс.При применении ШИМ также измеряются фактические обороты двигателя постоянного тока и записываются, чтобы увидеть, как скорость двигателя (об/мин) изменяется при изменении ширины ШИМ. Наряду с этим также измеряется приложенное к двигателю напряжение, чтобы увидеть скорость двигателя при различном приложенном напряжении. В частности, после записи всех значений составляется таблица наблюдений для ширины импульса (рабочий цикл), приложенного напряжения и скорости двигателя в об/мин. Эта таблица используется для подготовки графика рабочего цикла->об/мин или приложенного напряжения->графика об/мин двигателя.
до макс.При применении ШИМ также измеряются фактические обороты двигателя постоянного тока и записываются, чтобы увидеть, как скорость двигателя (об/мин) изменяется при изменении ширины ШИМ. Наряду с этим также измеряется приложенное к двигателю напряжение, чтобы увидеть скорость двигателя при различном приложенном напряжении. В частности, после записи всех значений составляется таблица наблюдений для ширины импульса (рабочий цикл), приложенного напряжения и скорости двигателя в об/мин. Эта таблица используется для подготовки графика рабочего цикла->об/мин или приложенного напряжения->графика об/мин двигателя.
Данный проект демонстрирует приведенный выше пример.Он применяет ШИМ к двигателю постоянного тока для непрерывного изменения его скорости от минимальной до максимальной и от максимальной до минимальной, а также измеряет следующие параметры
1) Ширина ШИМ в %
2) Подаваемое напряжение на двигатель
3) Скорость двигателя в об/мин
Он использует плату Arduino UNO для генерации ШИМ и измерения/расчета выше 3 параметров. Эти параметры отображаются на ЖК-дисплее 16×4. Очень легко изменить скорость двигателя постоянного тока с помощью Arduino. Arduino может генерировать ШИМ на своем аналоговом выходе, и когда он применяется к двигателю постоянного тока, его скорость меняется.Так что это очень простая и легкая задача. Для измерения оборотов используется оптодатчик прерываний MOC7811. Когда двигатель совершает 1 оборот, датчик генерирует 1 импульс, и такие импульсы рассчитываются Arduino для расчета оборотов. Итак, давайте посмотрим, как это делается. Давайте начнем с принципиальной схемы, а затем ее описания и работы.
Эти параметры отображаются на ЖК-дисплее 16×4. Очень легко изменить скорость двигателя постоянного тока с помощью Arduino. Arduino может генерировать ШИМ на своем аналоговом выходе, и когда он применяется к двигателю постоянного тока, его скорость меняется.Так что это очень простая и легкая задача. Для измерения оборотов используется оптодатчик прерываний MOC7811. Когда двигатель совершает 1 оборот, датчик генерирует 1 импульс, и такие импульсы рассчитываются Arduino для расчета оборотов. Итак, давайте посмотрим, как это делается. Давайте начнем с принципиальной схемы, а затем ее описания и работы.
Как показано на рисунке, схема построена с использованием макетной платы Arduino UNO, ЖК-дисплея 16×4, NPN-транзистора Дарлингтона TIP122 и оптического датчика прерывания MOC7811.
· Аналоговый выходной контакт 9 Arduino управляет двигателем постоянного тока 12 В при 2000 об / мин через TIP122. Этот контакт подключен к базовому входу TIP122 через токоограничивающий резистор R2, а двигатель постоянного тока подключен к коллектору TIP122
· Внутренний ИК-светодиод MOC7811 получает прямое смещение с помощью питания 5 В от платы Arduino через токоограничивающий резистор R1. Внутренний фототранзистор подтянут резистором R4. Выход коллектора транзистора подключен к цифровому контакту 7 или arduino
Внутренний фототранзистор подтянут резистором R4. Выход коллектора транзистора подключен к цифровому контакту 7 или arduino
. Контакты данных ЖК-дисплея D4–D7 подключены к цифровым контактам 5, 4, 3 и 2 Arduino, а управляющие контакты Rs и En подключены к контактам 12 и 11.Вывод RW подключен к земле. Контакт Vcc и контакт LED+ подключены к источнику питания 5 В от платы Arduino, а контакт Vss и контакты LED- подключены к заземлению платы arduino
· Один потенциометр подключен к контакту Vee для изменения контрастности ЖК-дисплея
Работа схемы:· Сначала двигатель получает питание 12 В от внешнего источника питания. Затем плата Arduino, ЖК-дисплей и датчик получают питание через USB от ПК / ноутбука
· Первоначально ЖК-дисплей показывает различные параметры как
PWM ip:
PWM Duty:
PWM volt:
скорость:
· Затем Arduino начинает применять PWM к двигателю с максимальной шириной импульса
· Таким образом, двигатель начнет вращаться с максимальной скоростью. Предусмотрена некоторая временная задержка, позволяющая двигателю достичь полной скорости
Предусмотрена некоторая временная задержка, позволяющая двигателю достичь полной скорости
· Когда двигатель начинает вращаться, колесо с прорезями, прикрепленное к его валу, также будет вращаться
· Датчик MOC7811 размещается таким образом, что прорезь колеса проходит через датчик воздушный зазор. Таким образом, когда двигатель совершает один полный оборот, паз проходит через зазор датчика. Через прорезь в колесе ИК-свет падает на фототранзистор. Таким образом, транзистор проводит и генерирует отрицательный импульс на выходе коллектора. Таким образом, каждый оборот двигателя производит импульс
· Частота этих импульсов на самом деле RPS (-оборот в секунду) двигателя.Для измерения частоты этого импульса сначала измеряется время включения, затем измеряется время выключения, и исходя из этой частоты рассчитывается как
Период времени = Ton + Toff (в мкс)
Частота = 1000000/период времени
· Эта частота скорость двигателя в об/с. Исходя из этого RPS, скорость двигателя рассчитывается в RPM как
RPM= 60xRPS
· Вход ШИМ изменяется от 250 до 100 с шагом 15. Это непосредственно отображается на ЖК-дисплее
Это непосредственно отображается на ЖК-дисплее
· Время ВКЛ и ВЫКЛ время выхода ШИМ также измеряется для расчета рабочего цикла ШИМ как
Рабочий цикл ШИМ = [PWM_Ton / (PWM_Ton + PWM_Toff)] × 100
· Наконец, напряжение, подаваемое на двигатель, рассчитывается как
Напряжение, подаваемое на двигатель = напряжение двигателя × коэффициент заполнения
= (12/100) × коэффициент заполнения
· Сначала вход ШИМ уменьшается с 250 до 100 за 10 шагов по 15, а затем снова увеличивается со 100 до 250, и этот цикл постоянно повторяется
· Итак скорость двигателя постоянно уменьшается, а затем постоянно увеличивается.Мы можем наблюдать изменение скорости двигателя, которое отображается на ЖК-дисплее как скорость в об/мин
Таким образом, данный проект изменяет скорость двигателя постоянного тока, а также точно измеряет ее. Он отображает % ширины импульса, подаваемого на двигатель, вместе с приложенным напряжением. Таким образом, можно записать скорость двигателя в об/мин при различном напряжении и длительности импульса в наблюдательной таблице для дальнейших нужд.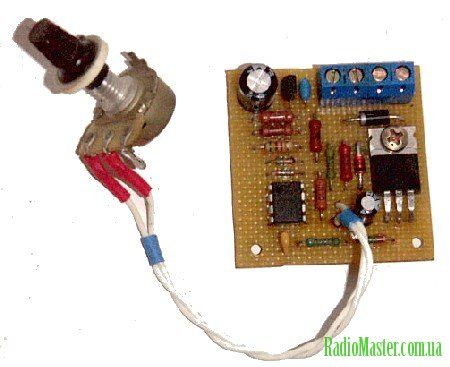
SERPENT I — контроллер двигателя постоянного тока
ВВЕДЕНИЕ: Драйвер/контроллер двигателя постоянного тока H-Bridge (кодовое название: SERPENT I) на базе мощного MOSFET IRF3710, заявленного на 57 ампер постоянного тока.Драйвер можно разделить на две части, первая посвящена управлению устройства, такие как микроконтроллеры и макетные платы, а вторая, энергетическая часть, посвящена питанию МОП-транзисторы. SERPENT I — контроллер/драйвер двигателя постоянного тока объявлен компанией публикация статьи под названием «Контроллер двигателя постоянного тока» в журнале InfoElektronika из Ниша – Сербия.| IRF3710 H-Bridge |
 собственно интегральная схема с двумя компараторами/операционными усилителями. В виде
LM393 — это компаратор, значит нужно обеспечить точку опорного напряжения
который выполнен в одном делителе напряжения. Делитель напряжения реализован
потенциометром R10 с номинальным сопротивлением 50кОм, который штатно
подключен последовательно к резистору R9 с сопротивлением 50 кОм, обеспечивая напряжение Vref, используемое драйвером затвора LM393. При этом потребление энергии через ту же ветвь R9-R10 снижается.Резистор R9 играет роль
роль дополнительной защиты, если ползунок потенциометра R10 находится в положении
рядом с источником питания VDD. Без резистора R9 возможен неконтролируемый ток.
привести к повреждению потенциометра и остальной электроники.
собственно интегральная схема с двумя компараторами/операционными усилителями. В виде
LM393 — это компаратор, значит нужно обеспечить точку опорного напряжения
который выполнен в одном делителе напряжения. Делитель напряжения реализован
потенциометром R10 с номинальным сопротивлением 50кОм, который штатно
подключен последовательно к резистору R9 с сопротивлением 50 кОм, обеспечивая напряжение Vref, используемое драйвером затвора LM393. При этом потребление энергии через ту же ветвь R9-R10 снижается.Резистор R9 играет роль
роль дополнительной защиты, если ползунок потенциометра R10 находится в положении
рядом с источником питания VDD. Без резистора R9 возможен неконтролируемый ток.
привести к повреждению потенциометра и остальной электроники. | Выпрямительные диоды |
 В то же время между воротами
и источника существует определенная разность потенциалов, которая должна находиться в пределах
пределы ВГС максимальные. Напряжение затвора также зависит от сигнала ШИМ. Диоды 1N4002/
1N4004 летают
задние диоды и играют роль в защите транзисторов MOSFET от пиков
генерируемая противоэлектродвижущей силой (БЭДС). С другой стороны, как
H-Bridge работает в импульсном режиме (широтно-импульсная модуляция — ШИМ), обратные диоды
позволяет генерируемой обратной электродвижущей силе «вернуться» к источнику питания
(блок питания), одновременно обеспечивая работу H-Bridge в качестве аккумулятора
зарядное устройство.
В то же время между воротами
и источника существует определенная разность потенциалов, которая должна находиться в пределах
пределы ВГС максимальные. Напряжение затвора также зависит от сигнала ШИМ. Диоды 1N4002/
1N4004 летают
задние диоды и играют роль в защите транзисторов MOSFET от пиков
генерируемая противоэлектродвижущей силой (БЭДС). С другой стороны, как
H-Bridge работает в импульсном режиме (широтно-импульсная модуляция — ШИМ), обратные диоды
позволяет генерируемой обратной электродвижущей силе «вернуться» к источнику питания
(блок питания), одновременно обеспечивая работу H-Bridge в качестве аккумулятора
зарядное устройство.ЛСП1 и LSP2 — соединения, используемые для двигателя постоянного тока, точки пайки постоянного тока обмотки двигателя включены нижняя сторона печатной платы H-Bridge. Никакие специальные разъемы не предназначены для Подключение двигателя постоянного тока с помощью Н-моста. Электрическая схема SERPENT I представлена на рисунке №1.
Рисунок №1. SERPENT I — электрическая схема драйвера двигателя постоянного тока SERPENT I — электрическая схема драйвера двигателя постоянного тока |
Блок питания двигателя
+ Отвод Motor Power Supply предназначен для питания двигателей постоянного тока с электрической энергией.Есть два способа подачи питания на двигатель постоянного тока: через разъем x2-1 (x2-3 GND) и через прямое подключение к печатной плате путем пайки LSP3 указывает на положительный контакт источника питания напрямую (припой снизу сторону печатной платы). Представлена ветвь мощности двигателя, относящаяся к двигателю постоянного тока. на обеих сторонах печатной платы, что означает, что определенные компоненты должны быть припаян с двух сторон, рисунок №2. МОП-транзисторы IRF3710 (ТО-220 пакет) находятся в одной линейке вместе с регулятором/стабилизатором напряжения 7815 (пакет ТО-220).Поскольку силовые МОП-транзисторы, а также регулятор напряжения 7815, намного выше, чем другие компоненты, все остальные компоненты, такие как диоды, резисторы, разъемы DIL припаяны первыми.
 После того, как все компоненты спаяны,
На печатной плате установлены радиаторы ТО-220. Доступное место на печатной плате относительно
радиатор ТО-220,
подходит к радиатору
модель ХСИНК ТР-5. Подробнее о радиаторе по следующему адресу:
http://store.comet.rs/Catalogue/Product/9467/. Дополнительное охлаждение регулируется
медная поверхность сверху и снизу платы SERPENT I.
После того, как все компоненты спаяны,
На печатной плате установлены радиаторы ТО-220. Доступное место на печатной плате относительно
радиатор ТО-220,
подходит к радиатору
модель ХСИНК ТР-5. Подробнее о радиаторе по следующему адресу:
http://store.comet.rs/Catalogue/Product/9467/. Дополнительное охлаждение регулируется
медная поверхность сверху и снизу платы SERPENT I.| Рисунок №2. Печатная плата — ответвление питания двигателя постоянного тока |
| 7815 — источник питания CMOS Logic |
7815 IC — шаг вниз блок питания линейного напряжения с +15 вольт и 1 ампер на выходе и максимальное падение напряжения 2,5 В, что означает, что минимальное питание должно быть рассчитан на 17,5В, чтобы обеспечить 15В на выходе.7815 IC предназначен для обеспечить электропитание логических вентилей CMOS H-Bridge, используемых для затвора драйвера драйвер LM393.
 Обе стороны микросхемы 7518, вход и выход, имеют блок и/или
электролитический конденсатор
используются как дополнительная стабилизация напряжения, фильтр нижних частот/байпасные конденсаторы. JP1 — перемычка
предназначен в первую очередь для тестирования схемы H-моста, и он используется, чтобы позволить
тестирование источников питания ниже 15 В. Например, чтобы разрешить тестирование при 12В
источник питания
уровень напряжения. Когда перемычка JP1 замкнута, в качестве источника питания используется 7815.
относительно логических вентилей CMOS (4082, 40106).В противном случае логические вентили CMOS
питание через разъем VDD X2-2 (x2-3 — GND). JC2P и JC3P — это мощность
контакты питания, относящиеся к микросхемам логических вентилей CMOS. Каждый
логический элемент, включая драйвер затвора LM393, имеет собственный дополнительный блочный конденсатор
для обеспечения дополнительной фильтрации нижних частот (дополнительная интегральная схема
стабилизация питания).
Обе стороны микросхемы 7518, вход и выход, имеют блок и/или
электролитический конденсатор
используются как дополнительная стабилизация напряжения, фильтр нижних частот/байпасные конденсаторы. JP1 — перемычка
предназначен в первую очередь для тестирования схемы H-моста, и он используется, чтобы позволить
тестирование источников питания ниже 15 В. Например, чтобы разрешить тестирование при 12В
источник питания
уровень напряжения. Когда перемычка JP1 замкнута, в качестве источника питания используется 7815.
относительно логических вентилей CMOS (4082, 40106).В противном случае логические вентили CMOS
питание через разъем VDD X2-2 (x2-3 — GND). JC2P и JC3P — это мощность
контакты питания, относящиеся к микросхемам логических вентилей CMOS. Каждый
логический элемент, включая драйвер затвора LM393, имеет собственный дополнительный блочный конденсатор
для обеспечения дополнительной фильтрации нижних частот (дополнительная интегральная схема
стабилизация питания).КМОП-логика ворота
| Логические вентили CMOS |
 Если сигнал включения установлен на логический
ноль H-Bridge тормозит, не работает. В этом случае выходы логики 4082
ворота
установлены на логический ноль, и поэтому компаратор также выдает,
управление MOSFET-транзисторами IRF3710 как неактивными — в этом случае H-Bridge не
Работа. В противном случае,
Схема Н-моста активна. Сигнал направления определяет направление постоянного тока
вращения двигателя. Если сигнал направления установлен на высокий логический уровень, IC3A
на выходе присутствует сигнал ШИМ. В этом случае выход IC3B устанавливается на
логический ноль, и выполнен он на интегральной микросхеме 40106 (подробнее
в настоящий момент
схема).ШИМ-сигнал постоянно присутствует на обоих логических элементах 4082.
в то же время. R7 и R8 — подтягивающие резисторы на выходе логической схемы И.
гейт 4082. Сигнал с выходов 4082 перенаправляется на LM393
положительные входы.
Если сигнал включения установлен на логический
ноль H-Bridge тормозит, не работает. В этом случае выходы логики 4082
ворота
установлены на логический ноль, и поэтому компаратор также выдает,
управление MOSFET-транзисторами IRF3710 как неактивными — в этом случае H-Bridge не
Работа. В противном случае,
Схема Н-моста активна. Сигнал направления определяет направление постоянного тока
вращения двигателя. Если сигнал направления установлен на высокий логический уровень, IC3A
на выходе присутствует сигнал ШИМ. В этом случае выход IC3B устанавливается на
логический ноль, и выполнен он на интегральной микросхеме 40106 (подробнее
в настоящий момент
схема).ШИМ-сигнал постоянно присутствует на обоих логических элементах 4082.
в то же время. R7 и R8 — подтягивающие резисторы на выходе логической схемы И.
гейт 4082. Сигнал с выходов 4082 перенаправляется на LM393
положительные входы.| LM393 как драйвер ворот IRF3710 |
Контроль логические и оптронные входы
| Оптроны 4N25 с макетной платой |
 Каждый управляющий сигнал оптоизолирован
с помощью оптронов
ИС 4Н25, состоящая из фотодиода в качестве передатчика и
фототранзистор в качестве приемника. Пример: если фотодиод зашит в
серия с
резистор сопротивлением 30 Ом, логический уровень управляющего сигнала
должно быть 0 или 3,3 вольта. Катод фотодиода подключен к земле GND_OC
который является неотъемлемой частью микроконтроллера или любого другого элемента управления
единичное устройство. На приемной стороне эмиттер фототранзистора
жестко подключен к источнику питания двигателя постоянного тока GND.При этом логика управления
устройства и энергетическая часть H-Bridge не зашиты напрямую, нет
физическая связь между этими двумя частями. С другой стороны фототранзистор
коллектор подключен последовательно к резистору сопротивлением 10 кОм. То
отрезать
область между коллектором и эмиттером имеет высокое логическое значение/уровень (VDD
Напряжение). Наоборот, насыщение фототранзистора представлено как
логический ноль, примерно ноль вольт, но это не ноль вольт.
Каждый управляющий сигнал оптоизолирован
с помощью оптронов
ИС 4Н25, состоящая из фотодиода в качестве передатчика и
фототранзистор в качестве приемника. Пример: если фотодиод зашит в
серия с
резистор сопротивлением 30 Ом, логический уровень управляющего сигнала
должно быть 0 или 3,3 вольта. Катод фотодиода подключен к земле GND_OC
который является неотъемлемой частью микроконтроллера или любого другого элемента управления
единичное устройство. На приемной стороне эмиттер фототранзистора
жестко подключен к источнику питания двигателя постоянного тока GND.При этом логика управления
устройства и энергетическая часть H-Bridge не зашиты напрямую, нет
физическая связь между этими двумя частями. С другой стороны фототранзистор
коллектор подключен последовательно к резистору сопротивлением 10 кОм. То
отрезать
область между коллектором и эмиттером имеет высокое логическое значение/уровень (VDD
Напряжение). Наоборот, насыщение фототранзистора представлено как
логический ноль, примерно ноль вольт, но это не ноль вольт. Оптопара 4N25 IC
инвертирует логику компьютерной системы.Пример:
если логика включения
установлен на 3,3 вольта (высокий логический уровень), между
логический ноль коллектора и эмиттера представлен, потому что ток течет через
фототранзистор,
это означает, что управляющий сигнал включения инвертируется микросхемой 4N25. ЗМЕЯ я не предоставляю
любой предопределенный разъем, кроме винтовых разъемов. Вместо этого протоборд
матрица размером 4×8 предоставляется как общее решение в
Для того, чтобы создать правильные разъемы адаптера для целевой платы/платформы/микроконтроллера.Драйвер двигателя постоянного тока IRF 3710 оснащен 32 точками пайки, доступными из
обе стороны. На каждый управляющий сигнал (Enable, Direction, PWM) восемь пайки
очки
доступны в одном ряду, и восемь дополнительных точек
доступны для опто-соединения
земля (GND_OC).
Оптопара 4N25 IC
инвертирует логику компьютерной системы.Пример:
если логика включения
установлен на 3,3 вольта (высокий логический уровень), между
логический ноль коллектора и эмиттера представлен, потому что ток течет через
фототранзистор,
это означает, что управляющий сигнал включения инвертируется микросхемой 4N25. ЗМЕЯ я не предоставляю
любой предопределенный разъем, кроме винтовых разъемов. Вместо этого протоборд
матрица размером 4×8 предоставляется как общее решение в
Для того, чтобы создать правильные разъемы адаптера для целевой платы/платформы/микроконтроллера.Драйвер двигателя постоянного тока IRF 3710 оснащен 32 точками пайки, доступными из
обе стороны. На каждый управляющий сигнал (Enable, Direction, PWM) восемь пайки
очки
доступны в одном ряду, и восемь дополнительных точек
доступны для опто-соединения
земля (GND_OC).Н-мост своими руками (сделай сам) сборка
Все компоненты H-Bridge (SERPENTI) являются сквозными компонентами и могут быть припаяны стандартно. паяльники. Компонент
пайку следует выполнять в следующем порядке.Сначала все ниже
компоненты (ниже на печатной плате), такие как резисторы, диоды и разъемы DIP/DIL
спаяны. После этого более высокие компоненты, такие как IRF3710 и напряжение 7815
регуляторы припаяны. Во время сборки SERPENT I знайте, что вы
разряжены, чтобы избежать электростатических разрядов, возникающих при ношении
синтетическая одежда. После пайки флюс должен быть полностью удален с поверхности.
печатная плата. Для очистки платы от паяльного флюса достаточно 70% спирта. По следующей ссылке пара
видео представляет DIY (сделай сам) SERPENT I собираю.
паяльники. Компонент
пайку следует выполнять в следующем порядке.Сначала все ниже
компоненты (ниже на печатной плате), такие как резисторы, диоды и разъемы DIP/DIL
спаяны. После этого более высокие компоненты, такие как IRF3710 и напряжение 7815
регуляторы припаяны. Во время сборки SERPENT I знайте, что вы
разряжены, чтобы избежать электростатических разрядов, возникающих при ношении
синтетическая одежда. После пайки флюс должен быть полностью удален с поверхности.
печатная плата. Для очистки платы от паяльного флюса достаточно 70% спирта. По следующей ссылке пара
видео представляет DIY (сделай сам) SERPENT I собираю.SERPENT I — сине-белая, бело-черная и черно-желтая версии:
SERPENT I — сине-белая, бело-черная и черно-желтая версии
Опубликовано Zilsel Invent в воскресенье, 27 декабря 2015 г.
zilsel-invent не несет ответственности за любые ошибки или неточности, которые могут появиться в настоящем документе.
Технические характеристики и информация, содержащиеся в данных схемах, могут быть изменены в любое время без предварительного уведомления.
Обновление и упрощение оригинальной схемы ШИМ MC-2100
Обновление и упрощение оригинальной схемы ШИМ MC-2100
Схема.Левый разъем идет на MC-2100 (земля, 12В, сигнал). Правый разъем идет на регулятор скорости.
После обсуждения с Терри в комментариях к предыдущим постам мы пришли к выводу, что МС-2100 не ожидал полноценного сигнала 5В на входе управляющего сигнала (синий провод). Как показано на схеме MC-2100, оптоизолятор на входе (U1) имеет последовательно с ним резистор 22 Ом (R2). Подача 5 В на синий провод приводит к тому, что через оптоизолятор проходит 170 мА, что выше его номинального значения 50 мА.
Это привело к выводу, что в цепи на конце синего провода на приборной панели должен быть еще один резистор. При осмотре на печатной плате приборной панели беговой дорожки имеется резистор 240 Ом, соединенный последовательно с выходным сигналом управления. При последовательном сопротивлении 262 Ом ток через U1 теперь составляет 15 мА, что намного лучше для надежной работы.
При последовательном сопротивлении 262 Ом ток через U1 теперь составляет 15 мА, что намного лучше для надежной работы.
Еще один шаг вперед: схема может работать при более высоком напряжении, если используется последовательно подключенный резистор большего размера.Это позволяет исключить из схемы стабилизатор 5 В, а также транзистор из выхода, который был ошибочно добавлен, чтобы обеспечить более высокий выходной ток, требуемый схемой без токоограничивающего резистора.
Вот результирующая схема (продолжайте читать, еще не сделано!):
Драйвер ШИМ MC-2100 v6 — без фильтра
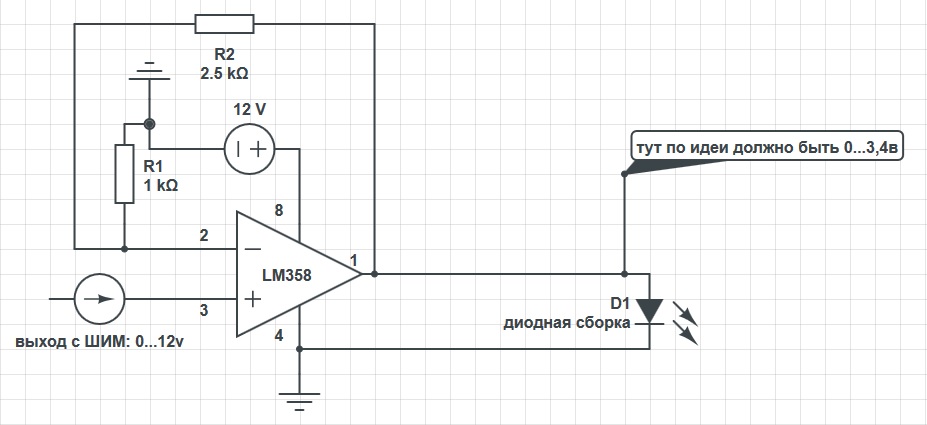
Поскольку компаратор LM393 только потребляет ток, токоограничивающие резисторы действуют как подтягивающие резисторы. Это также означает, что LM393 должен поглотить полный выходной ток, иначе оптоизолятор не выключится.
Предельный ток LM393 составляет 20 мА, а типичное падение напряжения составляет 0,15 В, поэтому выбор резисторов, удовлетворяющих требованию 50 мА оптоизолятора, может не удовлетворять требованию LM393. Расчет тока через любой компонент выглядит следующим образом:
Расчет тока через любой компонент выглядит следующим образом:
(Напряжение питания — падение напряжения на компоненте) / (Последовательное сопротивление) = Ток через компонент
Так, например, пара резисторов 560 Ом + 22 Ом даст (12 В – 1,2 В)/582 Ом = 18,6 мА через оптоизолятор, что является приемлемым значением.Тот же резистор 560 Ом (без дополнительного резистора) даст (12–0,15 В)/560 Ом = 21,1 мА через LM393, что выше номинального тока компаратора. Если бы использовалось это значение, компаратор попытался бы подтянуть выход к земле, но не смог бы полностью отключить оптоизолятор. На самом деле это именно то, что я наблюдал после тестирования схемы, как описано, что привело к пониманию этой концепции и пересмотру схемы.
В итоге я просто вставил в цепь еще один резистор (летающий резистор на картинке вверху), а не удалил и заменил резистор 560 Ом, в результате чего получилась пара 560+580 Ом, показанная выше.Эта комбинация привела к 10,3 мА через LM393 и 9,3 мА через оптоизолятор при питании 12 В.