cxema.org — Расчет частоты TL494
-
Статьи
- Усилители мощности
- Светодиоды
- Блоки питания
- Начинающим
- Радиопередатчики
- Разное
- Ремонт
- Шокеры
- Компьютер
- Микроконтроллеры
- Разработки
- Обзоры и тесты
- Обратная связь
-
Форум
- Усилите
Автомобильный преобразователь на TL494 для усилителя НЧ
Автомобильный преобразователь на TL494 для усилителя НЧ, схема которого приведена ниже, преобразует бортовое напряжение +12В в двухполярное +-35В. На самом деле выходное напряжение зависит от параметров трансформатора.
Номиналы элементов и параметры трансформатора, которые будут указаны ниже, рассчитывались для мощности в 150Вт, что позволяет запитать усилитель НЧ на TDA7293 или на TDA7294. Я же запитал данным преобразователем один канал TDA7293, поэтому мощности преобразователя в 150Вт мне было достаточным.
Схема автомобильного преобразователя на TL494 для усилителя НЧ
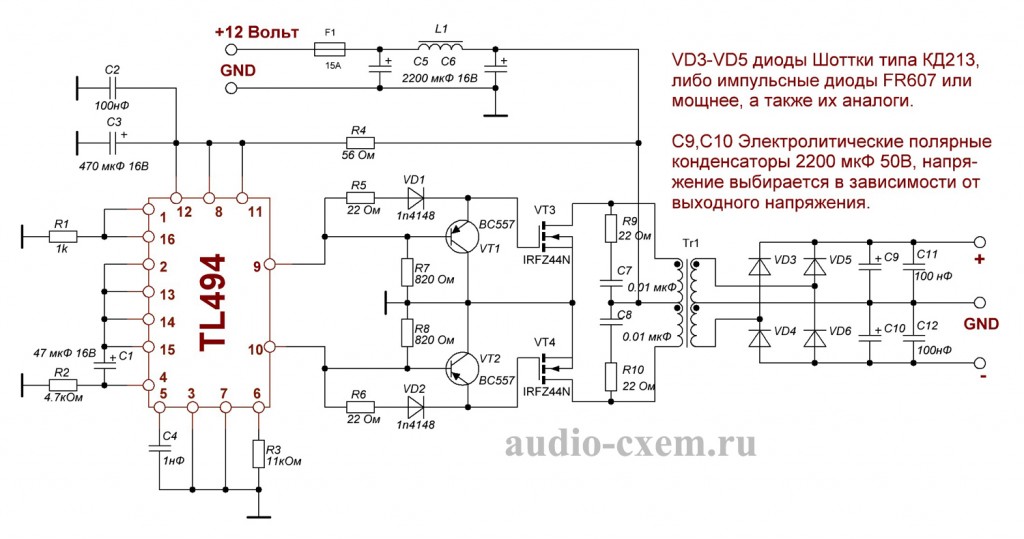
Схема преобразования двухтактная. Применяется такая схема в основном в повышающих преобразователях. Дефицитных компонентов в ней нет, за исключением диодов Шоттки КД213, в своем городе я их не нашел. Поставил импульсные диоды FR607, но они слабые, на 6 ампер. Еще один минус этих диодов, у них нет охлаждения, как у сборок. Для одного канала TDA7293 или TDA7294 диодов FR607 в принципе хватает.
Мозгом нашего автомобильного преобразователя является ШИМ контроллер TL494. Я использую китайские TL494, работают они у меня без нареканий. Есть вариант сэкономить немного денег и выдернуть ШИМ из старого блока питания ПК, очень часто они построены на TL494. Параметры и характеристики контроллера можете прочесть в даташите.
Список Элементов.
| ОБОЗНАЧЕНИЕ | ТИП | НОМИНАЛ | КОЛИЧЕСТВО | КОММЕНТАРИЙ |
| ШИМ контроллер | TL494 | 1 | ||
| VT1,VT2 | Биполярный транзистор | BC557 | 2 | |
| VT3,VT4 | MOSFET-транзистор | IRFZ44N | 2 | |
| VD3-VD6 | Диод Шоттки | КД213 | 4 | FR607 и мощнее |
| VD1,VD2 | Выпрямительный диод | 1n4148 | 2 | |
| R1 | Резистор 2Вт | 18кОм | 1 | |
| C1 | Электролит | 47мкФ 16В | 1 | |
| С2,С11,С12 | Конденсатор неполярный | 0.1 мкф | 3 | Керамика любое напряж. |
| С3 | Электролит | 470 мкФ 16В | 1 | |
| C4 | Конденсатор неполярный | 1нФ | 1 | Керамика любое напряж. |
| C5,С6 | Электролит | 2200 мкФ 16В | 2 | |
| C7,С8 | Конденсатор неполярный | 0,01 мкФ | 2 | Керамика любое напряж. |
| C9,С10 | Электролит | 2200мкФ 50В | 2 | |
| R1 | Резистор | 1 кОм 0.25Вт | 1 | |
| R2 | Резистор | 4.7 кОм 0.25Вт | 1 | |
| R3 | Резистор | 11 кОм 0.25Вт | 1 | |
| R4 | Резистор | 56 Ом 2Вт | 1 | |
| R5,R6 | Резистор | 22 Ом 0.25Вт | 2 | |
| R7,R8 | Резистор | 820 Ом 0.25Вт | 2 | |
| R9,R10 | Резистор | 22 Ом 2Вт | 2 | |
| F1 | Предохранитель | 15А | 1 |
Скачать список элементов в PDF формате.
Частота ШИМ задается элементами C4,R3. С помощью этого калькулятора вы сможете рассчитать приближенную частоту. На выходах она делится на два, но трансформатор работает именно на той частоте, которую мы рассчитываем и задаем.
Изначально я рассчитывал ШИМ и трансформатор под частоту 50кГц (С4-1нф, R3-22кОм), но видимо марка сердечника трансформатора, фактически отличалась от заявленной марки продавцом, плюс погрешности в расчете. В итоге, количество витков первичной обмотки было недостаточным, вследствие чего, в обмотке протекал очень большой ток холостого хода, ключи ужасно грелись, и был слышен писк. Пришлось повысить частоту до 100 кГц, симптомы болезни исчезли.
Если у вас случится подобная ситуация с неточным расчетом, то необходимо увеличить, либо уменьшить частоту элементами C4,R3. Если на холостом ходу горячие ключи и горячий трансформатор, то следует повысить частоту, либо добавить витки в первичной обмотке. Совсем забыл, это если во вторичке нет короткого замыкания и нет ошибок в выходном выпрямителе, а то если есть КЗ на выходе, то естественно все будет греться и сгорит, так как в данной схеме нет защиты от КЗ.
Если на холостом ходу ничего не греется, а при нагрузке происходит чрезмерное выделение тепла в трансформаторе, значит нужно понизить частоту элементами C4,R3, либо уменьшить количество витков первичной обмотки.
Расчет и намотка трансформатора автомобильного преобразователя.
Теперь приступим к самой увлекательной части, намотке трансформатора!
Габариты моего кольцевого сердечника 40мм-25мм-11мм, марка 2000МН.

Скачиваем и запускаем программу Lite-CalcIT(2000).
Схему преобразования выбираем Пуш-пул, схема выпрямления двухполярная со средней точкой, тип контроллера TL494, частоту ставьте 50-100 кГц, в зависимости от частотозадающих элементов C4,R3, далее выбираем нужное нам на выходе и на входе напряжения, выбираем также диаметр провода.
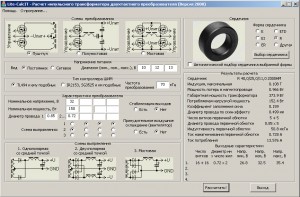
Пару слов скажу про напряжение. При расчете я указал входное напряжение 10В-11В-13В, а после того как собрал преобразователь, при испытаниях замерил напряжение на клеммах аккумулятора 13,5 Вольт, в итоге на выходе получил не +-35В а +-46В на холостом ходу. Поэтому номинальное ставьте не 11В, а 13,5В. Минимальное и максимальное соответственно 11В и 14,5В.
В ходе расчета, я получил количество витков первичной обмотки 5+5, провод диаметра 0.85мм сложенный в пять жил. И как же это понять, спросите меня вы! Но тут ничего сложного, итак, приступим…
Мотаем первичную обмотку.
Сначала, обмотаем наше колечко диэлектриком.

Все обмотки будем мотать в одну сторону, в какую, выбирать вам. Единственное правило, в одну сторону!
Мотаем одним куском проволоки 5 витков. Берем еще кусок проволоки, и виток к витку мотаем еще 5 витков, и так далее виточек к виточку, пока не получим 5 витков в 10 жил (5+5 жил).


Далее разделим по 5 жил и скрутим выводы.

Кладем изоляцию на первичную обмотку.


Сразу зачищаем хвосты, скручиваем и усаживаем в термоусадку.



Все, первичная обмотка у нас готова.
Объясню, что мы получили. Нам нужна первичная обмотка, имеющая 10 витков в 5 жил с отводом от середины (5+5 витков). Мы могли намотать так, сначала мотаем 5 витков 5 жилами, распределенными равномерно по всему кольцу, далее делаем отвод , кладем изоляцию, и сверху еще 5 витков 5 жилами. Получим тоже самое 5+5 витков проводом в 5 жил., ну или 10 витков с отводом от середины, кому как нравится называть. Минус данного способа в том, что обмотки могут быть не одинаковыми, а это плохо, так же чем больше слоев у трансформатора, тем ниже его КПД.
Поэтому, мы мотали сразу 10 жилами 5 витков, далее разделили, и получили две одинаковых обмотки имеющих по 5 витков из 5 жил. Давайте разберемся, как соединить данные обмотки. Тут ничего сложного, начало одной обмотки соединяем с концом другой. Главное не перепутать, и не соединить начало одной обмотки с её же концом.)))))
В статье “Расчет и намотка импульсного трансформатора” описан именно такой метод намотки вторичной обмотки понижающего преобразователя, предлагаю посмотреть.
Соединяются выводы первички на самой плате. Если все правильно соединили, то средняя точка должна прозвониться с верхним и нижним плечом , показав нулевое сопротивление на мультиметре.
Ну, вроде бы объяснил. Друзья простите если много воды!
Мотаем вторичные обмотки.
По расчетам я получил 16+16 витков, проводом диаметр, которого равен 0.72мм, сложенным в 2 жилы. То есть 32 витка с отводом от середины. Запомните, если есть отвод от середины, то значит каждую половину нужно распределять по всему кольцу, а не на половине кольца.
Берем двойной провод и мотаем 16 витков в ту же сторону, что и первичную обмотку. У меня влезло 17 витков, я не стал перематывать и оставил 17 виточков. Далее выводы зачистил, скрутил и посадил в термоусадку.



Берем двойной провод и мотаем еще 16 витков (у меня 17 витков) между витками предыдущей обмотки, в том же направлении. Посадил в термоусадку другого цвета, чтобы не ошибиться при соединении.


Вторичная обмотка соединяется на плате, аналогично первичной обмотке (начало одной соединяется с концом другой).
Далее кладем изоляцию.

С трансформатором вроде бы закончили. Ура, Ура, Ура!
Дроссель мотается на желтом колечке, двумя жилами проводом, диаметр которого составляет 0,85мм, имеет 11 витков. Колечко выдернуто из БП ПК.

Если найдете диоды Шоттки КД213, ставьте их. Можно попробовать спаять по два штуки FR607. Либо переделать схему выпрямления и установить сборки из диодов Шоттки, которые можно поставить на радиатор.
Получился вот такой автомобильный преобразователь на TL494 для усилителя НЧ.


В итоге после испытаний, пришлось по два виточка с каждой вторичной обмотки убрать.
В итоге после испытаний, пришлось по два виточка с каждой вторичной обмотки убрать. Данное действие вызвано большим выходным напряжением. В результате получил 15+15 витков во вторичной обмотке.

В архиве под статьей две печатные платы, одна под КД213, вторая под FR607. Изначально плата под КД213 была взята из интернета, переработана и адаптирована мной под FR607. При желании вы можете сами развести печатную плату под ваши типоразмеры элементов, трансформатора и внутренние размеры корпуса.
Калькулятор расчета частоты TL494 СКАЧАТЬ
Список элементов в PDF СКАЧАТЬ
Даташит на TL494 СКАЧАТЬ
Печатная плата СКАЧАТЬ
Похожие статьи
Tl494 генератор регулировка частоты и скважности. Генератор импульсов на TL494
И вот, наконец, дошли руки. После сборок мелких катушек решил замахнуться на новую схему, более серьезную и сложную в настройке и работе. Перейдем от слов к делу. Полная схема выглядит так:
Работает по принципу автогенератора. Прерыватель пинает драйвер UCC27425 и начинается процесс. Драйвер подает импульс на GDT (Gate Drive Transformator — дословно: трансформатор, управляющий затворами) с GDT идут 2 вторичные обмотки включенные в противофазе. Такое включение обеспечивает попеременное открытие транзисторов. Во время открытия транзистор прокачивает ток через себя и конденсатор 4,7 мкФ. В этот момент на катушке образуется разряд, и сигнал идет по ОС в драйвер. Драйвер меняет направление тока в GDT и транзисторы меняются (который был открытым — закрывается, а второй открывается). И этот процесс повторяется до тех пор, пока идет сигнал с прерывателя.
GDT лучше всего мотать на импортном кольце — Epcos N80. Обмотки мотаются в соотношении 1:1:1 или 1:2:2. В среднем порядка 7-8 витков, при желании можно рассчитать. Рассмотрим RD цепочку в затворах силовых транзисторов. Эта цепочка обеспечивает Dead Time (мертвое время). Это время когда оба транзистора закрыты. То есть один транзистор уже закрылся, а второй еще не успел открыться. Принцип такой: через резистор транзистор плавно открывается и через диод быстро разряжается. На осциллограмме выглядит примерно так:
Если не обеспечить dead time то может получиться так, что оба транзистора будут открыты и тогда обеспечен взрыв силовой.
Идем дальше. ОС (обратная связь) выполнена в данном случае в виде ТТ (трансформатора тока). ТТ наматывается на ферритовом кольце марки Epcos N80 не менее 50 витков. Через кольцо продергивается нижний конец вторичной обмотки, который заземляется. Таким образом высокий ток со вторичной обмотки превращается в достаточный потенциал на ТТ. Далее ток с ТТ идет на конденсатор (сглаживает помехи), диоды шоттки (пропускают только один полупериод) и светодиод (выполняет роль стабилитрона и визуализирует генерацию). Чтобы была генерация необходимо также соблюдать фразировку трансформатора. Если нет генерации или очень слабая — нужно просто перевернуть ТТ.
Рассмотрим отдельно прерыватель. С прерывателем конечно я попотел. Собрал штук 5 разных… Одни пучит от ВЧ тока, другие не работают как надо. Далее расскажу про все прерыватели, которые делал. Начну пожалуй с самого первого — на TL494 . Схема стандартная. Возможна независимая регулировка частоты и скважности. Схема ниже может генерировать от 0 до 800-900 Гц, если поставить вместо 1 мкФ конденсатор 4,7 мкФ. Скважность от 0 и до 50. То что нужно! Однако есть одно НО. Этот ШИМ контроллер очень чувствителен к ВЧ току и различным полям от катушки. В общем при подключении к катушке, прерыватель просто не работал, либо все по 0 либо CW режим. Экранирование частично помогло, но не решило проблему полностью.
Следущий прерыватель был собран на UC3843 очень часто встречается в ИИП, особенно АТХ, оттуда, собственно, его и взял. Схема тоже неплохая и не уступает TL494 по параметрам. Здесь возможна регулировка частоты от 0 до 1кГц и скважность от 0 до 100%. Меня это тоже устраивало. Но опять эти наводки с катушки все испортили. Здесь даже экранирование нисколько не помогло. Пришлось отказаться, хотя собрал добротно на плате…
Надумал вернуться к дубовым и надежным, но малофункциональным 555 . Решил начать с burst interrupter. Суть прерывателя заключается в том, что он прерывает сам себя. Одна микросхема (U1) задает частоту, другая (2) длительность, а третья (U3) время работы первых двух. Все бы ничего, если бы не маленькая длительность импульса с U2. Этот прерыватель заточен под DRSSTC и может работать с SSTC но мне это не понравилось- разряды тоненькие, но пушистые. Далее было несколько попыток увеличить длительность, но они не увенчались успехом.
Схемы генераторов на 555
Тогда решил изменить принципиально схему и сделать независимую длительность на конденсаторе, диоде и резисторе. Возможно многие посчитают эту схему абсурдной и глупой, но это работает. Принцип такой: сигнал на драйвер идет до тех пор пока конденсатор не зарядится (с этим думаю никто не поспорит). NE555 генерирует сигнал, он идет через резистор и конденсатор, при этом если сопротивление резистора 0 Ом, то идет только через конденсатор и длительность максимальна (на сколько хватает емкости) не зависимо от скважности генератора. Резистор ограничивает время заряда, т.е. чем больше сопротивление, тем меньшей времени будет идти импульс. На драйвер идет сигнал меньшей длительностью, но тоже частоты. Разряжается конденсатор быстро через резистор (который на массу идет 1к) и диод.
Плюсы и минусы
Плюсы : независимая от частоты регулировка скважности, SSTC никогда не уйдет в CW режим, если подгорит прерыватель.
Минусы : скважность нельзя увеличивать «бесконечно много», как например на
На последнее не знаю как драйвер реагирует (плавную зарядку). С одной стороны драйвер также плавно может открывать транзисторы и они будут сильнее греться. С другой стороны UCC27425 — цифровая микросхема. Для нее существует только лог. 0 и лог. 1. Значит пока напряжение выше порогового — UCC работает, как только опустилось ниже минимального — не работает. В этом случае все работает в штатном режиме, и транзисторы открываются полностью.
Перейдем от теории к практике
Генератор на tl494 с регулируемой скважностью и частотой. Управление силовыми транзисторами микросхемой tl494
Dragons» Lord (2005)
Задача: Собрать удобный в эксплуатации, максимально универсальный генератор прямоугольных импульсов. Обязательное условие — обеспечить максимально возможные крутые передний и задний фронт сигнала. Также желательно охватить максимально широкий диапазон частот и скважности. Согласно поставленной задаче, общими усилиями участников проекта «сайт» была рождена схема, с которой вам предлагается ознакомиться далее.
Принципиальная схема и графики:
Фотографии готового генератора: в процессе работы с данным генератором, он периодически совершенствовался, номиналы схемы уточнялись. В связи с чем генератор претерпел два апгрейда. Представим все версии генератора по порядку. Первая версия, собранная сразу, отличалась тем, что не имела «на борту» источника питания.
В процессе эксплуатации выяснилось, что такой большой конденсатор не нужен. Конденсаторы были установлены непосредственно на плату генератора вместе со стабилизатором напряжения. На общее основание интегрированы трансформатор и тумблер по питанию.
Совсем недавно, с целью расширить доступный диапазон охватываемых частот, был произведён очередной апгрейд, и интегрирован в схему дополнительный переключатель для оперативной смены конденсатора во времязадающей цепочке, о чём будет подробнее рассказано ниже.
| Версия 3.0. (2009 год) расширен доступный частотный диапазон |
Описание схемы: микросхема TL494 может работать как в однотактном режиме (именно так она изображена на схеме выше), так и в двухтактном, работая на две нагрузки попеременно. Как преобразовать схему в двухтактник я расскажу ниже, а сейчас рассмотрим однотактную схему.
Однотактная схема характеризуется прежде всего тем, что скважность сигнала мы можем изменять от нуля до 100% (канал всегда открыт). Задающая цепочка скважности находится на 2 ноге микросхемы. Старайтесь выдержать указанные номиналы: 20К — подстроечный резистор и 12К ограничивающий. Конденсатор между 2 и 4 ногами микросхемы номиналом 0,1мкФ.
Частотный диапазон регулируется двумя элементами: во первых цепочкой резисторов на 6 ноге микросхемы, во вторых ёмкостью конденсатора на 5 ноге. Резисторы устанавливаем: 330К — подстроечный и 2,2К постоянный. Далее смотрим на график, который я привёл в начале. Номиналами резисторов мы ограничили графики по горизонтали. Слева и справа. Для конденсатора на 5 ноге ёмкостью 1000пФ = 1нФ = 0,001мкФ (верхняя прямая на графике) получаемый частотный диапазон от 4КГц до предела микросхемы (реально это 150..200КГц, но потенциально до 470КГц, правда такие частоты достаются не такими методами). В последнем апгрейде генератора в схему был введён переключатель, подменяющий времязадающий конденсатор на 5 ноге микросхемы с номинала 1000пФ на другой, номиналом 100нФ = 0,1мкФ, что даёт возможность перекрывать нижний диапазон частот (вторая снизу прямая на графике). Второй диапазон получается такой: от 40Гц до 5КГц. В итоге мы получили генератор, который перекрывает диапазон от 40Гц до 200КГц.
Теперь пару слов о выходном каскаде, которым мы управляем. В качестве ключа вы можете использовать любой из трёх ключей (полевых транзисторов), в зависимости от необходимых параметров на нагрузке. Вот они: IRF540 (28А, 100В), IRF640 (18А, 200В) и IRF840 (8А, 500В). Ножки у всех трёх пронумерованы одинаково. Для более резкого заднего фронта стоит транзистор КТ6115А. Роль этого транзистора резко сажать потенциал затвора полевика на минус. Диод и резистор номиналом 1К являются обвязкой этого дополнительного транзистора (дравера). Резистор 10 Ом на затворе непосредственно устраняет возможный высокочастотный звон. Также в целях борьбы со звоном рекомендую на затворную ножку полевика надеть малюсенькое ферритовое колечко.
При необходимости схему можно переделать в двухтактную и качать две нагрузки попеременно. Основные отличия двухтактного режима — это, во первых, снижение выходной частоты на каждом канале в два раза от расчётной, и во вторых, скважность сигнала в каждом канале теперь будет регулироваться от 0 до 50%. Чтобы перевести схему в двухтактный режим необходимо подать на 8 ногу микросхемы положительное питание (как на 11 ноге). Также необходимо соединить 13 ногу с 14 и 15. Соответственно на выход 9 ноги повесить аналогичный выходной каскад, как мы видим на 10 ножке микросхемы.
На последок отмечу, что микросхема TL494 работает от диапазона питания от 7 до 41В. Менее 7 Вольт подавать нельзя, — она банально не запустится. Ключевым транзисторам указанного типа вполне хватает питания в 9 Вольт. Лучше сделать 12В, ещё лучше 15В (будет открываться быстрее, то есть передний фронт будет короче). Если не найдёте КТ6115А, можно заменить его другим, менее мощным транзистором КТ685Д (или вообще любой буквы). Ножки 685 транзистора, если он лежит к вам лицом, — слева направо: К, Б, Э. Желаю удачных экспериментов!
Генератор на TL494 с регулировкой частоты и скважности
Очень полезным устройством при проведении экспериментов и настроечных работ является генератор частоты. Требования к нему невелики, нужны лишь:
- регулировка частоты (периода следования импульсов)
- регулировка скважности (коэффициент заполнения, длина импульсов)
- широкий диапазон
Диапазон регулировки частоты генератора чрезвычайно высок — от десятков герц до 500 кГц, а в некоторых случаях — и до 1 МГц, зависит от микросхемы, у разных производителей разные реальные значения максимальной частоты, которую можно «выжать».
Перейдём к описанию схемы:
Пит± и Пит~
— питание цифровой части схемы, постоянным и переменным напряжением соответственно, 16-20 вольт.
Vout
— напряжение питания силовой части, именно оно будет на выходе генератора, от 12 вольт. Чтобы запитать цифровую часть схемы от этого напряжения, необходимо соединить Vout и Пит± с учётом полярности (от 16 вольт).
OUT(+/D)
— силовой выход генератора, с учётом полярности. + — плюс питания, D — drain полевого транзистора. К ним по
Регулятор мощности tl494 и полевых транзисторах. Микросхема серии TL494
Все электронщики, занимающиеся конструированием устройств электропитания, рано или поздно сталкиваются с проблемой отсутствия нагрузочного эквивалента или функциональной ограниченностью имеющихся нагрузок, а так же их габаритами. К счастью, появление на российском рынке дешевых и мощных полевых транзисторов несколько исправило ситуацию.
Стали появляться любительские конструкции электронных нагрузок на базе полевых транзисторов, более пригодных к использованию в качестве электронного сопротивления, нежели их биполярные собратья: лучшая температурная стабильность, практически нулевое сопротивление канала в открытом состоянии, малые токи управления — основные преимущества, определяющие предпочтительность их использования в качестве регулирующего компонента в мощных устройствах. Более того, самые разнообразные предложения появились от производителей приборов, прайсы которых пестрят самыми разнообразными моделями электронных нагрузок. Но, так как производители ориентируют свою весьма сложную и многофункциональную продукцию под названием «электронная нагрузка» в основном на производство, цены на эти изделия настолько высоки, что покупку может позволить себе лишь весьма состоятельный человек. Правда, не не совсем понятно, — зачем состоятельному человеку электронная нагрузка.
ЭН промышленного изготовления, ориентированного на любительский инженерный сектор, мною замечено не было. Значит, опять придется все делать самому. Э-эх… Начнем.
Преимущества электронного эквивалента нагрузки
Чем же в принципе электронные нагрузочные эквиваленты предпочтительнее традиционных средств (мощные резисторы, лампы накаливания, термонагреватели и прочие приспособления), используемых зачастую конструкторами при наладке различных силовых устройств?
Граждане портала, имеющие отношение к конструированию и ремонту блоков питания, несомненно знают ответ на этот вопрос. Лично я вижу два фактора, достаточных для того, что бы иметь в своей «лаборатории» электронную нагрузку: небольшие габариты, возможность управления мощностью нагрузки в больших пределах простыми средствами (так, как мы регулируем громкость звучания или выходное напряжение блока питания — обычным переменным резистором а не мощными контактами рубильника, движком реостата и т.д.).
Кроме того, «действия» электронной нагрузки можно легко автоматизировать, облегчив таким образом и сделав более изощренными испытания силового устройства с помощью электронной нагрузки. При этом, разумеется, освобождаются глаза и руки инженера, работа становится продуктивней. Но о прелестях всех возможных наворотов и совершенств — не в этой статье, и, быть может, от другого автора. А пока, — лишь о еще одной разновидности электронной нагрузки — импульсной.
Особенности импульсного варианта ЭН
Аналоговые электронные нагрузки безусловно хороши и многие из тех, кто использовал ЭН при наладке силовых устройств, оценили ее преимущества. Импульсные ЭН имеют свою изюминку, давая возможность для оценки работы блока питания при импульсном характере нагрузки таком, как, например, работа цифровых устройств. Мощные усилители звуковых частот так же оказывают характерное влияние на питающие устройства, а потому, неплохо было бы знать, как поведет себя блок питания, расчитанный и изготовленный для конкретного усилителя, при определенном заданном характере нагрузки.
При диагностике ремонтируемых блоков питания эффект применения импульсной ЭН так же заметен. Так, например, с помощью импульсной ЭН была найдена неисправность современного компьютерного БП. Заявленная неисправность данного 850-ваттного БП была следующей: компьютер при работе с этим БП выключался произвольно в любое время при работе с любым приложением, независимо от потребляемой, на момент выключения, мощности. При проверке на обычную нагрузку (куча мощных резисторов по +3В, +5В и галогенных лампочек по +12В) этот БП отработал на «ура» в течении нескольких часов при том, что мощность нагрузки составила 2/3 от его заявленной мощности. Неисправность проявилась при подключении импульсной ЭН к каналу +3В и БП начал отключаться, едва стрелка амперметра доходила до деления 1А. При этом токи нагрузки по каждому из прочих каналов положительного напряжения не превышали 3А. Неисправной оказалась плата супервизора и была заменена на аналогичную (благо, был такой же БП с выгоревшей силовой частью), после чего БП заработал нормально на максимальном токе, допустимом для используемого экземпляра импульсной ЭН (10А), которая и является предметом описания в данной статье.
Идея
Идея создания импульсной нагрузки появилась достаточно давно и впервые была реализована в 2002 году, но не в теперешнем ее виде и на другой элементной базе и для несколько иных целей и не было в то время для меня лично достаточных стимулов и прочих основаий для развития этой идеи. Сейчас звезды стоят иначе и что-то сошлось для очередного воплощения этого устройства. С другой стороны, устройство изначально имело несколько иное назначение — проверка параметров импульсных трансформаторов и дросселей. Но одно другому не мешает. Кстати, если кто-то захочет заняться исследованием индуктивных компонентов с помощью этого или аналогичного устройства, пожалуйста: ниже архивы статей маститых (в области силовой электроники) инженеров, посвященных этой теме.
Итак, что же представляет собой «классическая» (аналоговая) ЭН в принципе. Токовый стабилизатор, работающий в режиме короткого замыкания. И ничего больше. И будет прав тот, кто в порыве какой угодно страсти замкнет выходные клеммы зарядного устройства или сварочного аппарата и скажет: это — электронная нагрузка! Не факт, конечно, что подобное замыкание не будет иметь пагубных последствий, как для устройств, так и для самого оператора, но и то и другое устройство действительно являются источниками тока и вполне могли бы претендовать после определенной доводки на роль электронной нагрузки, как и любой другой сколь угодно примитивный источник тока. Ток в аналоговой ЭН будет зависеть от напряжения на выходе проверяемого БП, омического сопротивления канала полевого транзистора, устанавливаемого величиной напряжения на его затворе.
Ток в импульсной ЭН будет зависеть от суммы параметров в число которых будет входить ширина импульса, минимальное сопротивление открытого канала выходного ключа и свойства проверяемого БП (емкость конденсаторов, индуктивность дросселей БП, выходное напряжение).
При открытом ключе ЭН образует кратковременное короткое замыкание, при котором конденсаторы испытуемого БП разряжаются, а дроссели (если они содержатся в конструктиве БП) стремяться к насыщению. Классического КЗ, однако, не происходит, т.к. ширина импульса ограничена во времени микросекундными величинами, определяющими величину разрядного тока конденсаторов БП.
В то же время проверка импульсной ЭН является более экстремальной для проверяемого БП. Зато и «подводных камней» при такой проверке выявляется больше, вплоть до качества питающих проводников, подводимых к питающему устройству. Так, при подключении импульсной ЭН к 12-тивольтовому БП соединительными медными проводами диаметром жилы 0,8мм и токе нагрузки 5А, осциллограмма на ЭН выявила пульсации, представляющие собой последовательность прямоугольных импульсов размахом до 2В и остроконечными выбросами с амплитудой, равной напряжению питания. На клеммах самого БП пульсации от ЭН практически отсутствовали. На самой ЭН пульсации были сведены к минимуму (менее 50мВ) при помощи увеличения количества жил каждого питающих ЭН проводников —
Регулируемый источник питания из БП ATX на TL494. Часть 1 — железо / Habr
Всем привет!Сегодня хотел бы рассказать Вам о своём опыте переделки самого обычного китайского БП ATX в регулируемый источник питания со стабилизацией тока и напряжения(0-20А, 0-24В).
В этой статье мы подробно рассмотрим работу ШИМ контроллера TL494, обратной связи и пробежимся по модернизации схемы БП и разработке самодельной платы усилителей ошибок по напряжению и току.
Честно признаться, сейчас я даже не могу назвать модель подопытного БП. Какой-то из многочисленных дешевых 300W P4 ready. Надеюсь, не нужно напоминать, что на деле эти 300W означают не больше 150, и то с появлением в квартире запаха жареного.
Рассчитываю на то, что мой опыт сможет быть кому-то полезен с практической точки зрения, а потому упор сделаю на теорию. Без нее всё равно не получится переделать БП т.к. в любом случае будут какие-то отличия в схеме и сложности при наладке.
Схема БП ATX
Для начала пройдемся по схеме БП ATX на контроллере TL494(и его многочисленных клонах).
Все схемы очень похожи друг на друга. Гугл выдает их довольно много и кажется я нашел почти соответствующую моему экземпляру.
Ссылка на схему в полном размере
Структурно разделим БП на следующие блоки:
— выпрямитель сетевого напряжения с фильтром
— источник дежурного питания(+5V standby)
— основной источник питания(+12V,-12V,+3.3V,+5V,-5V)
— схема контроля основных напряжений, генерация сигнала PowerGood и защита от КЗ
Выпрямитель с фильтрами это всё что в левом верхнем углу схемы до диодов D1-D4.
Источник дежурного питания собран на трансформаторе Т3 и транзисторах Q3 Q4. Стабилизация построена на обратной связи через опторазвязку U1 и источнике опорного напряжения TL431. Подробно рассматривать работу этой части я не буду т.к. знаю, что слишком длинные статьи читать не очень весело. В конце я дам название книги, где подробно рассмотрены все подробности.
Обратите внимание, в схеме по ошибке и ШИМ контроллер TL494 и ИОН дежурного питания TL431 обозначены как IC1. В дальнейшем я буду упоминать IC1 имея ввиду именно ШИМ контроллер.
Основной источник питания собран на трансформаторе Т1, высоковольтных ключах Q1 Q2, управляющем трансформаторе Т2 и низковольтных ключах Q6 Q7. Всё это дело раскачивается и управляется микросхемой ШИМ контроллера IC1. Понимание принципа работы контроллера и назначения каждого элемента его обвязки — это как раз то, что необходимо для сознательной доработки БП вместо слепого повторения чужих рекомендаций и схем.
Механизм работы примерно таков: ШИМ контроллер, поочередно открывая низковольтные ключи Q6 Q7, создает ЭДС в первичной обмотке трансформатора Т2. Видите, эти ключи питаются низким напряжением от дежурного источника питания? Найдите на схеме R46 и поймете о чем я. ШИМ контроллер также питается от этого дежурного напряжения. Чуть выше я назвал трансформатор Т2 управляющим, но кажется у него есть какое-то более правильное название. Его основная задача — гальваническая развязка низковольтной и высоковольтной части схемы. Вторичные обмотки этого трансформатора управляют высоковольтными ключами Q1 Q2, поочередно открывая их. С помощью такого трюка низковольтный ШИМ контроллер может управлять высоковольтными ключами с соблюдением мер безопасности. Высоковольтные ключи Q1 Q2 в свою очередь раскачивают первичную обмотку трансформатора Т1 и на его вторичных обмотках возникают интересующие нас основные напряжения. Высоковольтными эти ключи называются потому, что коммутируют они выпрямленное сетевое напряжение, а это порядка 300В! Напряжение со вторичных обмоток Т1 выпрямляется и фильтруется с помощью LC фильтров.
Теперь, надеюсь, в целом картину вы себе представляете и мы можем идти дальше.
ШИМ контроллер TL494.
Давайте разберемся как же устроен ШИМ контроллер TL494.
Будет лучше, если вы скачаете даташит www.ti.com/lit/ds/symlink/tl494.pdf, но в принципе я постараюсь вынести из него самое главное с помощью картинок. Для более глубокого понимания всех тонкостей советую вот этот документ: www.ti.com/lit/an/slva001e/slva001e.pdf
Начнем, как это ни странно, с конца — с выходной части микросхемы.
Сейчас всё внимание на выход элемента ИЛИ (помечен красным квадратом).
Выход этого элемента в конкретный момент времени напрямую управляет состоянием одного или обоих сразу ключей Q1 Q2.
Вариант управления задаётся через пин 13(Output control).
Важная вещь №1: если на выходе элемента ИЛИ лог 1 — выходные ключи закрыты(выключены). Это верно для обоих режимов.
Важная вещь №2: если на выходе элемента ИЛИ лог 0 — один из ключей(или оба сразу) открыт(включен).
Вырисовывается следующая картина: по восходящему фронту открытый ранее транзистор закрывается(в этот момент они оба гарантированно закрыты), триггер меняет своё состояние и по нисходящему фронту включается уже другой ключ и будет оставаться включенным пока снова не придет восходящий фронт и не закроет его, в этот момент опять триггер перещёлкивается и следующий нисходящий фронт откроет уже другой транзистор. В single ended режиме ключи всегда работают синхронно и триггер не используется.
Время, когда выход находится в лог. 1(и оба ключа закрыты) называется Dead time.
Отношение длительности импульса(лог. 0, транзистор открыт) к периоду их следования называется коэффициент заполнения(PWM duty cycle). Например если коэффициент 100% то на выходе элемента ИЛИ всегда 0 и транзистор(или оба) всегда открыт.
Простите, но стараюсь объяснять максимально доступно и почти на пальцах, потому что официальным сухим языком это можно и в даташите прочитать.
Ах да, зачем же нужен Dead time? Если коротко: в реальной жизни верхний ключ будет тянуть наверх(к плюсу) а нижний вниз(к минусу). Если открыть их одновременно — будет короткое замыкание. Это называется сквозной ток и из-за паразитных емкостей, индуктивностей и прочих особенностей такой режим возникает даже если вы будете открывать ключи строго по очереди. Чтобы сквозной ток свести к минимуму нужен dead time.
Теперь обратим внимание на генератор пилы(oscillator), который использует выводы 5 и 6 микросхемы для установки частоты.
На эти выводы подключается резистор и конденсатор. Это и есть тот самый RC генератор о котором наверное многие слышали. Теперь на выводе 5(CT) у нас пила от 0 до 3.3В. Как видим, эта пила подается на инвертирующие входы компараторов Dead-time и PWM.
С терминами и работой выходной части ШИМ контроллера более-менее определились, теперь будем разбираться при чем тут пила и зачем нам все эти компараторы и усилители ошибок. Мы поняли, что отношение длительности импульса к периоду их следования определяет коэффициент заполнения, а значит и выходное напряжение источника питания т.к. в первичную обмотку трансформатора будет вкачиваться тем больше энергии, чем больше коэффициент заполнения.
Для примера разберемся, что нужно сделать чтобы установить коэффициент заполнения 50%. Вы еще помните про пилу? Она подается на инвертирующие входы компараторов PWM и Dead time. Известно, что если напряжение на инвертирующем входе выше чем на неинвертирующем — выход компаратора будет лог.0. Напомню, что пила — это плавно поднимающийся от 0 до 3.3в сигнал, после чего резко падающий на 0в.
Таким образом, чтобы на выходе компаратора 50% времени был лог.0 — на неинвертирующий вход нужно подать половину напряжения пилы(3.3в/2=1,65в). Это и даст искомые 50% duty cycle.
Заметили, что оба компаратора сходятся на том самом элементе ИЛИ, а значит, пока какой-то из компараторов выдает лог.1 — другой не может ему помешать. Т.е. приоритет имеет тот компаратор, который приводит к меньшему коэффициенту заполнения. И если на Dead time компаратор напряжение подается снаружи, то на PWM компаратор можно подать сигнал как извне(3 пин) так и с встроенных усилителей ошибок(это обычные операционные усилители). Они тоже соединяются по схеме ИЛИ, но т.к. мы уже имеем дело с аналоговым сигналом — схема ИЛИ реализуется с использованием диодов. Таким образом контроль над коэффициентом заполнения захватывает тот усилитель ошибки, который просит меньший коэффициент заполнения. Состояние другого при этом не имеет значения.
Обратная связь.
Хорошо, теперь как на всём этом построить источник питания? Очень просто! Нужно охватить БП отрицательной обратной связью. Разница между желаемым(заданным) и имеющимся напряжением называется ошибка. Если в каждый момент времени воздействовать на коэффициент заполнения так, чтобы исправить ошибку и привести ее к 0 — получим стабилизацию выходного напряжения(или тока). Обратная связь является отрицательной до тех пор, пока реагирует на ошибку управляющим воздействием с противоположным знаком. Если обратная связь будет положительной — пиши пропало! В таком случае обратная связь будет увеличивать ошибку вместо того чтобы уменьшать ее.
Всё это работа для тех самых усилителей ошибок. На инвертирующий вход усилителя ошибки подается опорное напряжение(эталон), а на неинвертирующий заводится напряжение на выходе источника питания. Кстати внутри ШИМ контроллера есть источник опорного напряжения 5В, который является точкой отсчёта во всех измерениях.
Компенсация обратной связи
Даже не знаю как бы по-проще это объяснить. С обратной связью всё просто только в идеальном мире. На практике же если вы изменяете коэффициент заполнения — выходное напряжение меняется не сразу, а с некоторой задержкой.
К примеру усилитель ошибки зарегистрировал понижение напряжения на выходе, откорректировал коэффициент заполнения и прекратил вмешиваться в систему, но напряжение продолжает нарастать и потом усилитель ошибки вынужден снова корректировать коэффициент заполнения уже в другую сторону. Такая ситуация происходит из-за задержки реакции. Так система может перейти в режим колебаний. Они бывают затухающими и незатухающими. Блок питания в котором могут возникнуть незатухающие колебания сигнала обратной связи — долго не протянет и является нестабильным.
У обратной связи есть определенная полоса пропускания. Допустим полоса 100кГц. Это означает, что если выходное напряжение будет колебаться с частотой выше 100кГц — обратная связь этого просто не заметит и корректировать ничего не будет. Конечно, хотелось бы, чтобы обратная связь реагировала на изменения любой частоты и выходное напряжение было как можно стабильнее. Т.е. борьба идет за то, чтобы обратная связь была максимально широкополосной. Однако та самая задержка реакции не позволит нам сделать полосу бесконечно широкой. И если полоса пропускания цепи обратной связи будет шире чем возможности самого БП на отработку управляющих сигналов(прямая связь) — на некоторых частотах отрицательная обратная связь будет внезапно становиться положительной и вместо компенсации ошибки будет ее еще больше увеличивать, а это как раз условия возникновения колебаний.
Теперь от задержек в секундах давайте перейдем к частотам, коэффициентам усиления и фазовым сдвигам…
Полоса пропускания это максимальная частота, на которой коэффициент усиления больше 1.
С увеличением частоты коэффициент усиления уменьшается. В принципе это справедливо для любого усилителя.
Итак, чтобы наш БП работал стабильно должно выполняться одно условие: во всей полосе частот, где суммарное усиление прямой и обратной связи больше 1(0дБ), отставание по фазе не должно превышать 310 градусов. 180 градусов вносит инвертирующий вход усилителя ошибки.
Вводом в обратную связь различных фильтров добиваются того, чтобы это правило выполнялось. Если очень грубо, то компенсация обратной связи это подгонка полосы пропускания и ФЧХ обратной связи под реакции реального источника питания(под характеристики прямой связи).
Тема эта очень не простая, под ней лежит куча математики, исследований и прочих трудов… Я лишь стараюсь в доступном виде изложить саму суть вопроса. Могу порекомендовать к прочтению вот эту статью, где хоть и не так на пальцах, но тоже в доступном виде освещен этот вопрос и даны ссылки на литературу: bsvi.ru/kompensaciya-obratnoj-svyazi-v-impulsnyx-istochnikax-pitaniya-chast-1
От теории к практике
Теперь мы можем взглянуть на схему БП и понять что в ней много лишнего. В первую очередь я выпаял всё, что относится к контролю выходных напряжений(схема формирования сигнала Power good). Нейтрализовал встроенные в ШИМ контроллер усилители ошибок путем подачи +5vref на инвертирующие входы и посадив на GND неинвертирующие. Удалил штатную схему защиты от КЗ. Выпилил все не нужные выходные фильтры от напряжений которые не используются… Заменил выходные диоды на более мощные. Заменил трансформатор! Выпаял его из качественного БП где написанные 400W действительно означают 400W. Разница в размерах между тем, что стояло тут до этого говорит сама за себя:
Заменил дроссели в выходном фильтре(с того-же 400W БП) и конденсаторы поставил на 25В:
Далее я разработал схему, позволяющую регулировать стабилизацию выходного напряжения и устанавливать ограничение тока выдаваемого БП.
Схема реализует внешние усилители ошибок собранные на операционных усилителях LM358 и несколько дополнительных функций в виде усилителя шунта(INA197) для измерения тока, нескольких буферных усилителей для выдачи величины установленного и измеренного тока и напряжения на другую плату, где собрана цифровая индикация. О ней я расскажу в следующей статье. Выдавать на другую плату сигналы как есть — не лучшее решение т.к. источник сигнала может быть достаточно высокоомным, провод ловит шум, мешая обратной связи работать устойчиво. В первой итерации я с этим столкнулся и пришлось всё переделать. В принципе на схеме всё подписано, подробно комментировать ее не вижу смысла и думаю, что для тех кто понял теорию выше, должно быть всё довольно очевидно.
Отмечу лишь, что цепочки C4R10 и C7R8 это и есть компенсация обратной связи о которой я говорил выше. Честно говоря, в ее настройке очень помогла прекрасная статьи эмбэддера под ником BSVi. bsvi.ru/kompensaciya-obratnoj-svyazi-prakticheskij-podxod Этот подход реально работает и потратив денек-другой мне удалось добиться стабильной работы БП описанным в статье методом. Сейчас, конечно, я бы справился часа за два наверно, но тогда опыта не было и по неосторожности я взорвал не мало транзисторов.
Ах да, обратите внимание на емкость C7! 1uF это довольно много. Сделано это для того, чтобы обратную связь по току зажать в быстродействии. Это такой грязный хак для преодоления нестабильности возникающей на границе перехода от стабилизации напряжения к стабилизации тока. В таких случаях применяют какие-то более навороченные приёмы, но так заморачиваться я не стал. Супер точная стабилизация тока мне не нужна, к тому же к моменту, когда я столкнулся с этой бедой — проект переделки БП успел здорово надоесть!
По этой схеме лазерным утюгом была изготовлена плата:
Она встраивается в БП вот таким образом:
В качестве шунта для измерения тока выбран кусок медной проволоки длинной сантиметров 10 наверно.
Корпус я использовал от довольно качественного БП Hiper. Кажется это самый проветриваемый корпус из всех что я видел.
Также возник вопрос о подключении вентилятора. БП ведь регулируется от 0 до 24В, а значит кулер придется питать от дежурки. Дежурка представлена двумя напряжениями — стабильными 5В, которые идут на материнскую плату и не стабилизированным, служебным питанием около 13.5В которое используется для питания самого ШИМ контроллера и для раскачки управляющего трансформатора. Я использовал обычный линейный стабилизатор чтобы получить стабильные +12В и завёл их на маленькую платку терморегуляции оборотов кулера, выпаянную с того-же Hiper’a. Платку закрепил на радиаторе шурупом просто из соображений удобства подключения кулера.
Радиаторы кстати пришлось изогнуть ибо они не вмещались в корпус нового формата. Лучше перед изгибанием их нагревать паяльной станцией, иначе есть шанс отломать половину зубов. Терморезистор регулятора закрепил на дросселе групповой стабилизации т.к. это самая горячая часть.
В таком виде БП прошел длительные испытания, питая кучу автомобильных лампочек дальнего света и выдерживал нагрузки током порядка 20А при напряжении 14В. А еще он гордо зарядил несколько автомобильных аккумуляторов, когда у нас в Крыму выключали свет.
Будущее уже рядом
Тем временем я задумал немного нестандартную систему индикации режимов работы БП, о чем в последствии немного сожалел, но всё-же она работает!
Так что в следующей статье вас ждет программирование ATMega8 на C++ с применением шаблонной магии, различных паттернов и самописная библиотека для вычислений с фиксированной точкой поверх которой реализовано усреднение отсчётов АЦП и перевод их в напряжение/ток по таблице с линейной интерполяцией. Каким-то чудом всё это уместилось в 5 с копейками килобайт флэша.
Не переключайте канал, должно быть интересно.
Кстати, обещанная в начале книга:
Куличков А.В. «Импульсные блоки питания для IBM PC»
radioportal-pro.ru/_ld/0/15_caf3ebe8f7eaeee.djvu
P.S. Надеюсь, изложенное выше окажется полезным. Строго не судите, но конструктивная критика приветствуется.
Added для RO пользователей которые не могут писать комментарии: email: altersoft_пёс_mail.ру
TL494 в полноценном блоке питания. Часть 2
РадиоКот >Схемы >Питание >Блоки питания >TL494 в полноценном блоке питания. Часть 2
Итак. Плату управления полумостовым инвертором мы уже рассмотрели, пришло время применить ее на практике. Возьмем типовую схему полумоста, особых сложностей в сборке она не вызывает. Транзисторы подключаются к соответсвующим выводам платы, подается дежурное питание 12-18 вольт т.к. последовательно включено 3 диода напряжение на затворах упадет на 2 вольта и получим как раз нужные 10-15 вольт.Рассмотрим схему:
Трансформатор рассчитывается программой или упрощенно по формуле N=U/(4*пи*F*B*S). U=155В, F=100000 герц с номиналами RC 1нф и 4.7кОм, B=0,22 Тл для среднестатистического феррита не зависимо от проницаемости, из переменного параметра остается только S — площадь сечения бочины кольца или среднего стержня Ш магнитопровода в метрах квадратных.
Дроссель рассчитывается по формуле L=(Uпик-Uстаб)*Тмертв/Iмин. Однако формула не очень удобная — мертвое время зависит от самой разности пикового и стабилизированного напряжения. Стабилизированное напряжение является средним арифметическим выборки с выходных импульсов (не путать со среднеквадратичным). Для регулируемого в полном диапазоне блока питания формулу можно переписать в виде L= (Uпик*1/(2*F))/Iмин. Видно что, в случае полной регулировки напряжения индуктивность нужна тем больше, чем меньше минимальное значение тока. Что-же произойдет если блок питания нагружен менее чем на ток Iмин.. А все очень просто — напряжение будет стремиться к пиковому значению, оно как бы игнорирует дроссель. В случае регулировки обратной связью, напряжение не сможет подняться, вместо этого импульсы будут задавлены так, что останутся только их фронты, стабилизация будет идти за счет нагрева транзисторов, по сути линейный стабилизатор. Считаю верным принять Iмин таким, чтобы потери линейного режима были равны потерям при максимальной нагрузке. Таким образом регулировка сохраняется в полном диапазоне и не опасна для блока питания.
Выходной выпрямитель построен по двухполупериодной схеме со средней точкой. Такой подход позволяет снизить вдвое падение напряжения на выпрямителе и позволяет применить готовые диодные сборки с общим катодом, которые по цене не дороже одиничного диода, например MBR20100CT или 30CTQ100. Первые цифры маркировки означают ток 20 и 30 ампер соответственно, а вторые напряжение 100 вольт. Стоит учесть, что на диодах будет двойное напряжение. Т.е. мы получаем на выходе 12 вольт, а на диодах будет 24 при этом.
Транзисторы полумоста.. А тут стоит подумать что нам нужно. Относительно маломощные транзисторы типо IRF730 или IRF740 умеют работать на очень высоких частотах, 100 килогерц для них еще не предел, к тому же мы при этом не рискуем схемой управления, построенной на не очень то мощных деталях. Для сравнения емкость затвора 740 транзистора всего 1,8нф, а IRFP460 целых 10нф, это означает в 6 раз больше мощности пойдет на переливания емкости каждый полупериод. Плюс ко всему это затянет фронты. Для статических потерь можно записать P=0.5*Rоткр *Iтр^2 на каждый транзистор. Словами — сопротивление открытого транзистора умноженное на квадрат тока через него, деленное на два. И эти потери обычно составляют несколько ватт. Другое дело динамические потери, это потери на фронтах, когда транзистор проходит через ненавистный всем режим А, и этот злой режим вызывает потери, грубо описываемые, как максимальная мощность умноженная на отношение длительности обеих фронтов к длительности полупериода, деленное на 2. На каждый транзистор. И эти потери куда больше чем статические. Поэтому, если взять транзистор мощнее, когда
можно обойтись более легким вариантом, можно даже проиграть в КПД, так что не злоупотребляем.
Глядя на входные и выходные емкости, может возникнуть желание поставить их чрезмерно большими, и это вполне логично, ведь несмотря на рабочую частоту блока питания в 100 килогерц, мы всетаки выпрямляем сетевое напряжение 50 герц, и в случае недостаточной емкости мы на выходе получим тот же выпрямленный синус, он замечательно модулируется и демодулируется обратно. Так что пульсации стоит искать именно на частоте 100 герц. Тем кто боится «вч шумов», уверяю, их там нету ни капли, проверено осциллографом. Но увеличение емкостей может привести к огромным пусковым токам, а они обязательно вызовут повреждени входного моста, а завышенные выходные емкости еще и к взрыву всей схемы. Чтобы исправить ситуацию я внес некоторые дополнения в схему — реле контроля заряда входной емкости и мягкий пуск на том же реле и конденсаторе С5. За номиналы не отвечаю, могу сказать только что C5 будет заряжаться через резистор R7, а оценить время заряда можно по формуле T=2пRC, с той же скоростью будет заряжаться выходная емкость, зарядка стабильным током описывается U=I*t/C, хоть не точно, но оценить бросок тока в зависимости от времени можно. Кстати, без дросселя это не имеет смысла.
Посмотрим на то что вышло после доработки:
А давайте представим, что блок питания сильно нагружен и в тоже время выключен. Мы его включаем, а зарядка конденсаторов не происходит, просто горит резистор на заряде и всё. Беда, но решение есть. Вторая контактная группа реле нормально замкнутая, а если 4 вход микросхемы замкнуть со встроенным стабилизатором 5 вольт на 14 ноге, то длительность импульсов снизится до нуля. Микросхема будет выключена, силовые ключи заперты, входная емкость зарядится, щелкнет релюшка, начнется заряд конденсатора C5, ширина импульсов медленно подымется до рабочей, блок питания полностью готов к работе. В случае снижения напряжения в сети, произойдет отключение реле, это приведет к отключению схемы управления. По восстановлению напряжения процесс запуска снова повторится. Вроде как грамотно выполнил, если что-то упустит, буду рад любым замечаниям.
Стабилизация тока, она здесь играет больше защитную роль, хотя возможна регулировка переменным резистором. Реализовано через трансформатор тока, потому что, адаптировалось под блок питания с двухполярным выходом, а там то не все просто. Расчет этого трансформатора выполняется очень просто — шунт сопротивлением в R Ом переносится на вторичную обмотку с количеством витков N как сопротивление Rнт=R*N^2, можно выразить напряжение из соотношения числа витков и падения на эквивалентном шунте, оно должно быть больше чем напряжение падения диода. Режим стабилизации тока начнется тогда, когда на + входе операционника напряжение попытается превысить напряжение на — входе. Исходя из этого расчет. Первичная обмотка — провод протянутый через кольцо. Стоит учесть, что обрыв нагрузки трансформатора тока может привести к появлению огромных напряжений на его выходе, по крайней мере достаточных для пробоя усилителя ошибки.
Конденсаторы C4 C6 и резисторы R10 R3 образуют дифференциальный усилитель. За счет цепочки R10 C6 и отзеркаленой R3 C4 получаем треугольный спад амплитудно частотной характеристики усилителя ошибки. Это выглядит как медленное изменение ширины импульсов в зависимости от тока. С одной стороны это снижает скорость обратной связи, с другой стороны делает систему устойчивой. Здесь главное обеспечить уход ачх ниже 0 децибел на частоте не более 1/5 частоты шима, такая обратная связь достаточно быстрая, в отличие от обратной связи с выхода LC фильтра. Частота начала среза по -3дб рассчитывается как F=1/2пRC где R=R10=R3; C=C6=C4, за номиналы на схеме не отвечаю, не считал. Собственное усиление
схемы считается как отношение максимально возможного напряжения (мертвое время стремится к нулю) на конденсаторе С4 к напряжению встроенного в микросхему генератора пилы и переведенное в децибелы. Оно подымает ачх замкнутой системы вверх. Учитывая то что наши компенцисующие цепочки дают спад 20дб на декаду начиная с частоты 1/2пRC и зная этот подъем несложно найти точку пересечения с 0дб, которая должна быть не более чем на частоте 1/5 рабочей частоты, т.е. 20 килогерц.Стоит заметить, что трансформатор не следует мотать с огромным запасом по мощности, наоборот ток кз должен быть не особо большим, иначе защита даже столь высокочастотная не сможет сработать вовремя, ну а вдруг там килоампер выскочит.. Так что и этим не злоупотребляем.
На сегодня всё, надеюсь схема будет полезна. Ее можно адаптировать под питалово шуруповерта, или сделать двухполярный выход для питания усилителя, так же возможен заряд аккумуляторов стабильным током. По полной обвязке tl494 обращаемся в прошлой части, из дополнений к ней только конденсатор плавного пуска C5 и контакты реле на нем же. Ну и важное замечание — контроль напряжения на конденсаторах полумоста вынудил связать схему управления с силой так, что это не позволит использовать дежурное питание с гасящим конденсатором, по крайней мере с мостовым выпрямлением. Возможное решение — однополупериодный выпрямитель типо диодный полумост или трансформатор в дежурку.
Все вопросы в Форум.
Как вам эта статья? | Заработало ли это устройство у вас? |