Arduino в автомобиле: использование с ЖК-дисплеем
Совсем недавно недорогие микроконтроллеры, такие как Arduino, открыли новые двери для тех, кто хочет сделать интересные приспособления для своих автомобилей. В этой статье мы рассмотрим популярный проект, связанный с Аrduino в автомобиле, который использует эту популярную открытую аппаратную плату.

Возможность применения Arduino в автомобиле для его улучшения
Самый распространенный проект на Ардуино для автомобиля – установка в машине ЖК-дисплея с особыми функциями и показателями.
Когда Ардуино-дисплей в авто находится в движении, отображаются: процент нагрузки двигателя, напряжение батареи, температура в салоне и температура охлаждающей жидкости двигателя (есть несколько других статистических данных о транспортном средстве, которые могут отображаться, если нужны). Помимо дисплея и микроконтроллера, понадобятся различные датчики для создания этого Аrduino проекта для автомобиля.
Если Аrduino для автомобиля совместим с IDE Teensy 3.6, то читается анимированный растровый образ машины и резервные датчики. Каждый из четырех датчиков на своем месте, так же, как и анимационная картинка автомобиляоторая меняет цвет, исходя из того, насколько близко объект находится к машине (только зеленый означает <5 футов, зеленый и желтый означает <2,6 фута и зеленый, желтый, а красный означает <1 фут).

Этот Ардуино проект для авто очень сложный, потому что резервные датчики взаимодействуют с приемопередатчиком, а затем отображают информацию на маленький ЖК-дисплей.
Проприетарный протокол связи не является типичным, как например, I2C, UART, CAN, USB и так далее. Свойства протокола могут различаться в каждом случае, в зависимости от поставщика.
Прежде чем отключить ЖК-дисплей, нужно проверить три провода, соединяющие трансивер и ЖК-дисплей. В инструкции указывается, что необходим красный провод + 5В, провод черного цвета и синий провод. После подключения осциллографа к синему проводу и заземлению пользователь увидит характерное изображение.
Биты под номерами 0-5 не несут никакой существенной информации и не кодируются.иты 6-8 соответствуют датчикам с названиями A, B, C или D. Необходимо загрузить эскиз в IDE Arduino, который считывает датчики и выводит данные через последовательную консоль.
Для следующего Ардуино проекта в автомобиле можно использовать бесплатное программное обеспечение для редактирования фотографий под названием GIMP для обрезки и изменения размера изображения машины с верхнего вида. Затем необходимо экспортировать изображение в виде 24-битного растрового изображения с именем «car.bmp», которое составляет 110 пикселей на 250 пикселей. После загружаем все на карту microSD и помещаем эту карту в микроконтроллер Teensy 3.6.
Основными причинами, по которым нужно использовать Teensy 3.6 вместо UNO, остается скорость, с которой Teensy может читать SD-карту и отображать изображение с помощью драйвера дисплея RA8875. При использовании UNO процесс займет около 8 секунд, в то время как с Teensy 3.6 займет 1,8 секунды.
Для дальнейшего конструирования проекта с Аrduino для автомобиля потребуется сделать трехмерную печать верхней и нижней крышки ЖК-дисплея для его защиты. В машине необходимо предварительно просверлить отверстия для датчиков.
Какие датчики можно подключить к Ардуино
В конечном итоге, пользователь получит отличное приспособление, контролирующие все возможные параметры автомобиля. Список деталей, которые понадобятся для создания этого ЖК-дисплея Ардуино для автомобиля, приведен ниже:
- Адаптер Freematics OBD-II.
- Резервные датчики.
- 7-дюймовый ЖК-дисплей TFT.
- Драйвер для дисплея LCD на базе SPI.
- Микропроцессор Teensy 3.6.
- Специальный уровень Shifter.
- 74HC125 Tri State Buffer IC.
- Карта памяти MicroSD Card.
- Провод, конденсаторы и резисторы.
- Датчик температуры DS18B20.
- Разделитель OBD-II.
- Микроконтроллер Ардуино.

Подключение, запуск и настройка автоустройств на Ардуино
Для загрузки эскиза проекта Ардуино для авто в виде ЖК-дисплея в Teensy 3.6 вам необходимо установить Teensyduino. Затем вам нужно будет заменить библиотеки Adafruit_RA8875 и Adafruit_GFX в расположении библиотеки Teensy (а не на вашем типичном месте в документах). На Mac операционной системе нужно щелкнуть правой кнопкой мыши по значку приложения Arduino в приложениях, а затем перейти в:
/Содержание/Java/hardware/teensy/avr/libraries
В Windows данная папка находится под основным диском C, в файлах программ x86, Arduino, а затем в папке с аппаратным обеспечением. Как только вы это сделаете, вам нужно будет изменить расположение эскиза в приложении Arduino, отредактировав его в настройках – обычно библиотеки “Тинси” размещаются по следующему адресу:
/Applications/Arduino.app/Contents/Java/hardware/teensy/avr
Из-за проблемы с внутренним температурным датчиком пользователь устанавливает температурный датчик модуля DS18B20.
В zip-файле, который находится по ссылке выше, вы увидите 4 эскиза Аrduino.
- Загрузите эскиз display_code, если вы хотите использовать внутренний температурный датчик модуля OB2 I2C OBD-II.
- Загрузите эскиз display_code_with_new_temperature_sensor, если вы хотите использовать модуль DS18B20.
Необходимо исправить ошибки, всплывающие при подключении электронного устройства, включая DS18B20, выводя температуру в 185 градусов по Фаренгейту; дисплей не включается вообще в холодную погоду, а пиксели застревают в неправильном цвете, когда дисплей затемнен.
Обратите внимание, что разгон teensy до 240 МГц не позволяет адаптеру I2C OBD-II взаимодействовать с teensy. Наконец, просто нажмите кнопку «Загрузить». В представленном скетче находятся обширные комментарии, которые помогут пользователю адаптироваться при конструировании ЖК-дисплея для авто.

Вскоре после установки дисплея пользователь поймет, что дисплей работает даже тогда, даже когда автомобиль выключен.
Заглянув в разводку OBD-II, электронщик обнаружит, что линия питания 12 В к разъему OBD-II всегда подключается непосредственно к батарее. Чтобы обойти это, необходимо купить разветвитель OBD-II и отрезать провод, идущий на контакт 16 на одном из двух разъемов на сплиттере, а затем подключить этот разрезаемый провод к добавлению проводки.

Затем, используя мультиметр, необходимо заглянуть в коробку предохранителей на стороне водителя и протестировать существующие предохранители, чтобы узнать, какой предохранитель получил питание после того, как ключ был включен в зажигание.
В конце пользователь подключает добавочный провод к предохранителю, который нужен для того, чтобы дисплей теперь включался только тогда, когда автомобиль работает и находится на ходу. Проведите некоторое исследование того, как правильно добавить схему к вашему автомобилю. Многие подобные проекты описаны на нашем сайте с подробными разъяснениями.
Кроме того, пользователь может добавить кнопку “стоп-старт” на Ардуино для своего дисплея с параметрами для автомобиля.
Arduino в автомобиле — Arduino
@Zuk Климат через управление стеклоподъемники, это сурово. Так регулировать температуру не получится однозначно. А вот изменять положения стекла в зависимости от скорости автомобиля не сложно, но потребует внесения кардинальных изменений в конструкцию всей системы подъема стекла. Например, установив шаговый мотор и измерив, количество шагов между крайними положениями стекла. Далее снимать показания скорости и линейно изменять уровень открытия окон. Но опять же вопрос в том, какая температура за бортом, это тоже надо учитывать при регулировки, а эти данные будут плавать и довольно сильно. Обязательно нужно помнить о системе безопасности, как реализовано в заводских доводчиках стекол многих автомобилей. Если стекло встречается с препятствием, рука или не дай Бог шея, оно автоматически отступает чтобы не причинить вред. В обычных моторах это можно поймать через отслеживание повышения потребляемого тока, а вот как в шаговых, пока под вопросом. Ну, или использовать штатные моторы, но тогда нужно придумать систему отслеживающую положение стекол.
Как по мне, так добиться оптимальной температуры в салоне с помощью такой системы не получится т.к температура окружающей среды автомобиля постоянна разная. Машина может двигаться в один момент времени на открытом солнце и через мгновение оказаться в тени или в тоннеле. Также важно контролировать уровень влажности т.к она может кардинально поменять ощущения человека при одной и той же температуре. И нужно понимать, что, скорее всего это будет похоже на постоянные подергивания стекол в момент попытки поддержать нужную температуру. Уверен, что это будет очень раздражать, да и результат будет на тройку с натяжкой.
Все это можно контролировать в закрытых системах, будь то автомобиль, или какое либо помещение, через изменение направлений движения воздуха, его температуры и скорости работы вентилятора. Ну и опять же помним про влажность.
Как по мне, так проще на контроллере реализовать климат контроль, если уже имеется кондиционер в автомобиле. Ну, или на худой конец, если имеется запас энтузиазма, с начало поставить кондиционер, а потом разработать климат контроль для него.
Робот на Ардуино и машинка на Bluetooth своими руками
Робот – машинка на Ардуино становятся одним из самым популярных инженерных проектов в школьной робототехнике. Именно с таких устройств, автономных или управляемых со смартфона и bluetooth, начинается путь в робототехнику “после Lego”. К счастью, сегодня можно без труда купить все необходимые компоненты и достаточно быстро создать своего первого робота для езды по линии или объезда препятствий. В этой статье вы найдете подробную видео инструкцию как сделать продвинутый автомобиль Arduino Car своими руками, с питанием, датчиками линии, расстояния и управлении через bluetooth.
Робот на ардуино своими руками
В отличие от других проектов, создание робота – автомобиля (Arduino Car) требует понимания и навыков работы сразу с несколькими важными компонентами, поэтому не стоит приступать к созданию машинок без получения базовых навыков работы с платформой Arduino. В любом случае, вам нужно будет но только подключить готовые модули, но и собрать конструкцию, шасси с двигателями, обеспечить правильное питание и управление. Все это потребует определенного терпения.

Вот список ключевых компонентов, которые обязательно встретятся в проекте.
Контроллер Ардуино
Куда уж без него, если мы говорим о проектах на этой платформе. Как правило, роботы машины делают на базе плат Arduino Uno и Nano. Mega будут слишком большие, Pro Mini сложнее подключать к компьютеру и соединять с остальными компонентами, а Leonardo требуют дополнительных навыков в программировании, они дороже и их основное преимущество (тесная интеграция с компьютером в качестве периферийного устройства) в данном случае не слишком востребована.
Есть еще вариант использования плат ESP8266 или ESP32, тогда в проекте появляется возможность управления машиной через WiFi. Но и сами платы и их программирование требует определенных навыков, в этой статье мы будем говорить преимущественно об Uno или Nano.
Конструкция, шасси и двигатели робота на Ардуино
Для того, чтобы что-то поехало или стало перемещаться, надо снабдить “это” колесами, гусеницами или манипуляторами-ногами. Вот тут выбор совершенно не ограничен, можно использовать совершенно любые комбинации и сочетания платформ. Как правило, в качестве начального варианта берутся уже готовые наборы платформ с Алиэкспресс.
 Двигатель, шасси и колеса машинки на ардуино
Двигатель, шасси и колеса машинки на ардуиноЕсли работать со стандартными наборами вам не интересно, можно создать платформу своими руками. Например, разобрать игрушечные радиоуправляемые машинки или любые двигатели на 5-12 вольт, с редукторами или без. Колеса можно создать и самим, что тоже является интересной задачей.
Драйвер двигателей
 Драйвер двигателя L298N
Драйвер двигателя L298NАрдуино – достаточно ранимое устройство, не терпящее больших нагрузок по току. Соединяя его с “брутальными” мощными двигателями, не избежать беды. Поэтому для нормальной совместной работы нам нужно будет включить в схему робота компонент, отвечающий за управление двигателями – подающий и отключающий ток на их обмотки. Речь идет о микросхеме или готовом модуле, которые называют драйвером двигателя. На нашем сайте есть статьи, посвященные драйверам, построенным на схеме H-моста. Если вы покупаете готовые шасси, то обязательно предусмотрите возможность размещения на них подходящего драйвера.
Красивый корпус
Как правило, вся конструкция автомобиля строится вокруг его шасси. Если посмотреть примеры готовых проектов, то они часто выглядят как “провода на колесиках” – внешний вид их изобилует пучками соединительных проводов, ведущих от восседающего на троне контроллера Ардуино к драйверам, моторам и датчикам. Между тем, красивый и функциональный корпус не только вызывает правильные эстетические чувства и помогает выделить вашу модель от остальных. Хороший корпус может превратить игрушку в реальное устройство, помогает привить навыки конструирования и промышленного дизайна, что важно для инженеров любого возраста.
Питание робота
Обеспечение правильной схемы питания – это то, что очень часто оказывается на последнем месте в списке приоритетов начинающих ардуинщиков. Между тем, именно ошибки в схеме электропитания становятся основными причинами проблем, возникающих в процессе работы умных устройств на Ардуино. Создавая ардуино-машинку нужно предусмотреть питание контроллера, двигателей, драйвера и датчиков. У всех них есть свои ограничения и особенности работы, требуется создать оптимальное по весу и сложности решение, позволяющее учесть все эти ограничения.
 Питание робота на Ардуино
Питание робота на АрдуиноСоздавая по-настоящему автономное устройство робота, нужно побеспокоиться и о времени его работы, и о возможности быстрой подзарядки или смены батареек. Как правило, выбираются решения из следующих вариантов:
- Обычные батарейки AA. Тут нужно понимать, что платы Arduino Uno, Nano и большинство двигателей, используемых в Ардуино-робототехнике, требуют напряжения в диапазоне 6-9 вольт. Поэтому придется собрать вместе последовательно не менее 4 батареек на 1,5 В, причем сами батарейки должны быть хорошего качества и обеспечивать работу с достаточно большим током. Например, большинство солевых батареек этим критериям не удовлетворяют. Батарейки AAA при создании ардуино-машинок практически не используются из-за своей пониженной емкости (хотя могут использоваться в миниатюрных моделях, где размер имеет первостепенное значение).
- Аккумулятор AA. Здесь возникает еще большее ограничение по напряжению и току. Большинство аккумуляторов выдают напряжение 1,2 вольт, поэтому их требуется больше для “собирания” нужных нам 6-9 вольт. Несомненным плюсом является возможность перезарядки.
- Литиевые аккумуляторы 18650. Это уже “серьезная артиллерия”, позволяющая получить большое время автономной работы, возможность подзарядки и приемлемые характеристики по току и напряжению. Рабочее напряжение для таких элементов питания – 3,7 В, что позволяет собирать готовую схему питания всего из двух элементов.
- Другие источники питания. Сюда можно включить как более мощные и габаритные никель-металлгидридные, кадмиевые аккумуляторы, так и многочисленные литий-ионные “плоские” варианты, используемые в дронах, смартфонах или другой портативной цифровой технике.
Каким бы ни был источник питания, нужно обеспечить его надежное крепление, удобное расположение, защиту от воздействия недружелюбной окружающей среды. Если вы подключаете к одному источнику и контролер, и двигатели, и датчики, то нужно позаботиться о правильной схеме, включающей, например, надежную связь “по земле” всех устройств.
Где купить платформу и запчасти
Все, о чем говорится в этой статье, можно без проблем купить на всем известном сайте. К сожалению, подавляющее большинство предложений основываются на стандартной платформе 4WD автомобиля с двумя несущими планками, не очень надежными двигателями и колесами, любящими ездить в “развалочку”. Но эти варианты относительно не дороги и вполне подойдут для начала работы.
Инструкция по сборке робота-автомобиля
В этой статье расскажем вам о том, как по шагам собрать универсального робота на колесной или гусеничной платформе. Управлять им будет микроконтроллер Ардуино нано. Если вам не нравится долго читать, посмотрите в конце статьи на видео, подготовленное нашими партнерами – каналом ArduMast Club.
Пример платформы робота-машины на Ардуино
Предлагаем инструкцию по созданию универсальной платформы, которая потом пригодится для создания самых разных проектов, независимо от выбранного контролера или типа шасси. Вы можете использовать стандартные варианты из Алиэкспресса, как на видео, можете снабдить машину гусеницами и создать вездеход, можете придумать вообще ни на что не похожий вариант. Главное, чтобы число двигателей не превышало 4 и сами ни не были слишком мощными (тогда придется менять тип управления моторами – другой драйвер двигателя).
 Робот на Ардуино
Робот на АрдуиноДля реализации проекта нам понадобится:
- Контроллер Ардуино (в нашем случае, Arduino Nano).
- Драйвер двигателя L298N.
- Двигатели с редукторами.
- Корпус и шасси для крепления колес и оборудования
- Корпус для аккумуляторов 18650 с выключателем.
- Коммутационные провода.
Дополнительное оборудование, которое потребуется для создания полноценного проекта:
- Датчик расстояния и серво-мотор, на который он установлен.
- Инфракрасные датчики линии.
- Светодиоды для индикации и “красоты”.
- Пьезодинамик – пищалка.
- Bluetooth модуль (если собираетесь управлять машинкой дистанционно).
- Sensor shield (упрощает коммутацию).
- Модуль контроля заряда и подзарядки аккумуляторов.
- Сами аккумуляторы.
 Общая схема машинки на Ардуино
Общая схема машинки на АрдуиноСхема электропитания робота автомобиля
Вопрос организации правильного стабильного электропитания является одним из самых важных в любом проекте.В нашей модели применена рекомендованная нами схема питания, основанная на использовании литийионных аккумуляторов формата 18650 и платы защиты их от переразряда и перезаряда.
Давайте разберем самый простой вариант схемы питания электромоторов. Перед началом сборки лучше заранее припаять провода к моторам.
 Схема питания и подключения двигателей в ардуино автомобиле
Схема питания и подключения двигателей в ардуино автомобилеВсе достаточно стандартно и вы найдете в интернете десятки подобных примеров. Но в этой схеме есть большой минус – в случае полного разряда аккумуляторы придут в негодность.
 Машинка на Ардуино
Машинка на АрдуиноДля добавления контроллера разряда придется внести следующие изменения в схему:
 Схема питания с контролем разряда аккумулятора
Схема питания с контролем разряда аккумулятораТеперь аккумуляторы будут защищены, но здесь нет возможности заряжать их.
 Питание робота Ардуино
Питание робота АрдуиноДля зарядки можно использовать модуль повышения напряжения с 5v до необходимого уровня зарядки, который зависит от количества серий используемых аккумуляторов. Он имеет гнездо типа микро USB и при частом использовании оно может сломаться, поэтому мы рекомендуем установить дополнительное гнездо для последующей подзарядки пяти вольтовым блоком питания. Для зарядки двух литий-ионных аккумуляторов необходимо настроить выходное напряжение на 8,4 Вольта.
 Схема питания с модулем зарядки для ардуино робота машинки
Схема питания с модулем зарядки для ардуино робота машинкиПодключаем двигатели и плату
С питанием платформы мы разобрались, теперь подключим остальные компоненты. Для начала припаиваем провода к моторам, затем обматываем их изолентой, чтобы случайно в дальнейшем не оторвать контакты. Можно сделать так, что в итоге на 2 двигателя будут идти всего два провода вместо 4х. Это немного упростит монтаж и сэкономит место на платформе.
Монтируем драйвер двигателей на платформу так, чтобы его радиатор был спереди. ЭТО ВАЖНО! В противном случае, вам придется переписывать программу для микроконтроллера.
 Драйвер двигателя для Ардуино робота
Драйвер двигателя для Ардуино роботаЗатем размещаем холдер и плату БМС. Не забываем оставлять место спереди для последующего монтажа каких-либо сенсоров. Ардуиио нужно разместить так, чтобы была в дальнейшем возможность подключить его к ПК для прошивки. Это же правило относится и к модулю для зарядки аккумуляторов.
Питание для ардуино и других электронных компонентов мы возьмем от драйвера двигателей.
Подключаем Bluetooth к машинке
Мы собираемся использовать модуль Bluetooth через SoftwareSerial (библиотеку SoftwareSerial.h), поэтому подключаем модуль блютуз к 3 и 4 цифровым пинам ардуино. RX к D3, TX к D4
 Схема подключения Bluetooth к ардуино машинке
Схема подключения Bluetooth к ардуино машинке Подключаем Bluetooth
Подключаем Bluetooth Схема подключения драйвера двигателя к роботу
Схема подключения драйвера двигателя к роботу
 Схема подключения компонентов к Arduino
Схема подключения компонентов к Arduino
 Датчик расстояния машины
Датчик расстояния машиныПлатформа робота готова! Теперь осталось загрузить прошивку для контроллера Ардуино и программу для смартфона RC CAR. Вы можете посмотреть на нашем сайте обзор Android приложений для работы с Arduino.
Программирование робота на Ардуино
Так как мы делаем инструкцию по сборке универсального робота, то неплохо бы предусмотреть все необходимое для разных вариантов ее использования. Весь код вы можете найти в архиве: https://yadi.sk/d/jIYZQDI-GuytMw
Для езды по черной линии мы задействовали 3 пина под датчики линии и три пина для подключения светодиодов, чтобы иметь возможность визуального контроля наличия линии. Другими словами, если под левым сенсором есть черная линия, то загорится левый светодиод и так далее. Кроме того, мы разработали и протестировали схему, в которой будут одновременно использоваться и управление скоростью моторов по ШИМ, и серводвигатель.
Видео инструкция по сборке робота на Ардуино
Предлагаем вашему вниманию подробную видео-инструкцию по сборке робота автомобиля на Ардуино от нашего партнера – канала ArduMast Club.
Надеемся, статья была полезна для вас. В комментариях под видео вы сможете найти код, схемы робота, соединения деталей, скетч и ссылки на интернет-магазины, в которых вы можете купить все необходимые компоненты.
Что Arduino забыла под капотом старого автомобиля или управление температурой воздуха на впуске необычным способом
И снова здравствуйте!После длительного перерыва решил поделится еще одним нестандартным (и возможно не нужным) решением, но в этот раз у нас машинки будут не игрушечные, а вполне себе настоящие.
Вдумчивое молчание обычно посещает матерых автомехаников когда им объясняют что это…, И да, это СИНЯЯ изолента!
В силу сложившихся обстоятельств (необходимости пересекать линию разграничения) мне однажды стало необходимо перемещать в пространстве именно на автомобиле. Делать это удобнее всего именно таким способом по тем же причинам.
Из кладовки (гаража брата) был извлечен автомобиль марки Mercedes E200 1986 года выпуска.
Тут стоит отметить что ни я ни брат не обладаем великими автомобильными знаниями (а скорее даже наоборот) и возможно «изобретаем велосипед» или наоборот решения будут не сильно адекватные в этой области, но есть задача и мы ее решали как могли.
Постановка задачи.
«Слушаю – забываю, смотрю – запоминаю, делаю – понимаю». Конфуций.
Итак был определен минимальный фронт работ, исходя из нашего видения ситуации, дабы подготовить машину для путешествия. Одна из задач была — отремонтировать систему регулирования температуры поступающего в двигатель воздуха. Система не критичная и возможно чаще даже не нужная, но так как могли быть заморозки пренебрегать этим не стоило.
В двигатель должен поступать воздух определенной температуры (около 20 градусов), по ходу работы происходит смешивание холодного воздуха за бортом с воздухом разогретым выпускной системой (над выпускными патрубками установлен кожух который собирает горячий воздух). Смешивая в разных пропорциях можно регулировать температуру воздуха на входе в двигатель. Эти занимается простая заслонка, типа такой.
Что там внутри и как оно работает можно почитать вот тут у одного хорошего человека.
Если кому интересно немного информации по температуре входного воздуха под спойлером.Совершенно не обладая знаниями в этой области я как обычно начал гуглить. Так сложилось что любой вопрос в авто тематике возводится до уровня религиозного спора где истину часто так и не находят. Поэтому сильно углубляться порой бывает вредно, но при этом основную суть вопроса ухватить стоит, что я и сделал.Итак, факт первый — при сильном морозе и большом потреблении воздуха в районе карбюратора может просто образовываться лед, это усугубляется тем фактом что при испарении бензина смесь еще более охлаждается. Этот лед возможно и не принесет вреда двигателю, но свободно может что-то заморозить в системе смесеобразования и вы приехали.
Факт второй — мы знаем что с повышением температуры плотность воздуха и не только падает, поскольку температура в моторном отсеке немногим ниже температуры прогретого двигателя (около 90 градусов) то сделав впуск просто из моторного отсека мы получаем неслабую разницу с забортной температурой воздуха что ведет к уменьшению количества воздуха в смеси. И он довольно горячий. В карбюраторном двигателе это важно потому что карбюратор не умеет нивелировать этот эффект, то есть он не понимает сколько кислорода в воздухе и не корректирует это объемом воздуха на туже порцию топлива.
Может не сильно удачно, но понятно это иллюстрирует применение в турбированных двигателях интеркуллера для охлаждения разогретого турбиной воздуха. Согласитесь, если бы это было не важно то никто бы не парился с лишней деталью. Естественно что там перепад температур больше, но явление от этого не исчезает и в нашем случае.
Если загуглить также про холодный впуск то увидите обширные поля сражений в эпичном холливаре.
Мне кажется лучше всего и проще это показано тут:
Это что касается вопроса только плотности. Есть еще вопрос касающийся влияния на процесс горения температуры смеси в момент поджига. Если коротко то оно тоже влияет на мощность, но это совсем уже дебри. Кому интересно просим на канал Евгения Травникова этот человечище откроет вам глаза на многие моменты о которых вы и не подозревали.
Итог простой — нужно «махать» заслонкой чтобы добиться приемлемой температуры воздуха.
С завода этой заслонкой управляет довольно простой термосиловой элемент, это латунный патрон из которого выдвигается шток который и тягает заслонку. Внутри патрона находится парафин в вперемешку с металлической пылью, короче от нагрева эта смесь расширяется выталкивая шток.
В нашем случае эта деталь давно была «отремонтирована» до полной негодности нашими смекалистыми аборигенами гаражных кооперативов. Вскрытие показало что вместо полированного штока туда кто-то инсталлировал похожий гвоздь, вбив его до упора (шоб не болталось).
Прикинув стоимость и реальность достать эту деталь в наших краях, я предпринял попытку найти аналог от классики (ВАЗ). Однако как оказалось крайне сложно объяснить что за деталь тебе нужна поскольку в классике чаще всего эту заслонку удаляют как не нужную и посему запасные такие покупают редко, соответственно и спроса нет.
Потратив на поиски около недели я понял что весь функционал этой детали можно организовать за несколько дней с копеечными затратами и дополнительными функциями на базе Arduino. Кроме того, бонусом мы получаем возможность подключение чего угодно, измерение и мониторинг температур там куда засунем датчик, измерение любых напряжений под капотом, UART интерфейс и конечно же бесценный опыт!
Итак что нужно:
— Контроль температуры в корпусе воздушного фильтра.
— Управление заслонкой для регулирования этой температуры.
Что получили:
— Контроль температуры в корпусе воздушного фильтра.
— Управление заслонкой для регулирования этой температуры.
— Контроль температуры где угодно с помощью дополнительных датчиков, я установил еще одни.
— Контроль напряжения бортовой сети.
— Возможность расширить функционал изменением прошивки и добавлением датчиков и исполнительных механизмов.
— UART интерфейс, туда я на время устанавливал адаптер BluetothToUART и мониторил на смартфоне.
1. Неудачная попытка использовать шаговый двигатель от FDD.
Очень мне понравилась идея установить шаговый двигатель от FDD на штатное место термосилового элемента. И оно туда даже встало и даже тягало заслонку. Управлял им с помощью микросхему l293.
Однако в итоге мне сильно не понравилось усилие развиваемое этим двигателем, в условиях подкапотного пространства и тряски этого явно не достаточно, я мог без особого усилия двигать заслонку пальцем. Fail!
2. Использование сервопривода.
Далее было решено переделать все под сервопривод. В случае с последним мы получаем точное позиционирование заслонки, легкость поиска и замены в случае необходимости. Сервопривод был установлен с холодной стороны от заслонки, что бы не грелся от горячего потока воздуха и соединен тягой из скрепки с самой заслонкой. На удивление сделать все это вышло быстрее и в разы удобнее чем с шаговиком, там это было вообще штучное изделие.
3. Arduino.
Была у меня в наличии Arduino Mini Pro, добавил туда еще корпус от ноутбучного БП, пару цифровых датчиков 18b20, самый простой сервопривод, плату DC-DC ШИМ преобразователя KIS-3R33S для того чтобы из бортовых 12В получить привычные 5В, несколько конденсаторов для сглаживания пульсаций, немного проволоки из витой пары. Получилось довольно компактно.
Попробую набросать схему, не думаю что она кому-то нужна но так нагляднее. Особой сложностью она не отличается.
Из схемы видно что осталось уйма свободных входов что можно будет применить в дальнейшем.
Были опасения что вся эта электроника негативно отреагирует на близкое расположение с высоковольтными проводами системы зажигания, но даже блютус адаптер который вообще был вне корпуса и никак не экранирован, нормально вещал из под металлического капота в салон.
Питание на весь блок управления подается от бортовой цепи «15» (это так обзывается в некоторых автомобилях цепь которая включается когда водитель поворачивает ключ и включает зажигание) далее напряжение понижается до 5В от который все и запитано.
Один датчик установлен примерно в месте где стоял старый термосиловой элемент. Второй просто болтается около коробки БУ, (типа меряет температуру подкапотного пространства). На один аналоговый вход ардуины подается бортовое напряжение через делитель, а на второй любое другое, тоже через делитель. У нас были проблемы с клапанами печки поэтому мы мониторили и их работу за одно. Напряжения просто измеряются и ни на что не влияют, это просто для мониторинга.
В целом алгоритм работы сводится к измерению температуры и в соответствии с этим двигать заслонку, передавать данные в UART. Детали можете посмотреть в самом скетче.
Cкетч тут.
4. Android.
Android тут собственно и не причем, просто в качестве дебюта в программировании под него было написано простенькое приложение для отображения данных с блока управления заслонкой. Поскольку приложение простое возможно оно будет полезно тем кто хочет начать программировать блютуз стек под Android.
DIYCarTune
Вот само приложение.
Вот проект под Android Studio.
Приложение будет выводить любые данные которые вы отошлете с Arduino, ее можно применить и не по назначению.
5. Установка и испытания
Весь блок был прикреплен на корпусе заслонки сверху, думаю там будет достаточно тепло и комфортно.
Некоторое время «помониторив» работу я решил что «оно работает». Никаких изменений пока не вносил. Единственный баг это когда при остановке автомобиля набегающий поток резко исчезает, а корректировка идет достаточно медленно так как сам датчик имеет тепловую инерцию нагрева своего корпуса. При необходимости можно повысить частоту коррекции положения заслонки.
Еще испытания показали что поскольку кастрюля воздушного фильтра лежит на двигателе она тоже греется, я этот момент упустил. Это отражается в резком нагреве воздуха при остановке автомобиля.
Показан момент когда машина стоит, заслонка закрыта, идет холодный поток (позиция сервы 170, первый параметр), второй параметр это усредненная температура, третий температура в корпусе воздушного фильтра, четвертый это датчик температуры который весит снаружи блока управления (фактически это температура подкапотного пространства), пятый это напряжение бортовой сети, шестой это напряжение на клапанах печки и последний это время прошедшее с последней корректировки положения заслонки (в скетче выставлено время частоты корректировки положения раз в 60 сек.)
Показать работу самого механизма сложно потому что он закрыт со всех сторон, реальное положение можно увидеть присмотревшись к положению вала на котором сидит заслонка, его торец торчит снаружи и на нем я сделал насечки крайних положений.
P.S. Безусловно что машина бы работала и без этого всего «огорода», но разве мы занимаемся подобным только лишь от жесткой необходимости? )))
Бортовой компьютер и множество других полезных для авто Arduino-проектов своими руками
Технологии не стоят на месте и сегодня автолюбителям предлагается множество различных вариантов для совершенствования своих «железных коней». Одним из таковых является Arduino. Это устройство представляет собой инструмент, использующийся для проектирования электронных устройств. В случае с автомобилем проектирование обычно осуществляется на лобовое стекло. Как сделать бортовой компьютер на Arduino и как его правильно настроить — читайте в этой статье.
Содержание
[ Раскрыть]
[ Скрыть]
Идеи для авто на основе маленькой платы с маленьким процессором — Arduino
Компы давно и плотно вошли в нашу жизнь. Аппаратная платформа Arduino — это одна из последних разработок с открытым программным кодом, которая построена на обычной печатной схеме. Подробнее о том, как с помощью такой платы сделать разные устройства для авто, мы расскажем далее.
БК
С помощью платы Arduino можно соорудить автомобильный бортовой компьютер, который сможет:
- рассчитать расход горючего;
- вывести информацию о температуре антифриза;
- рассчитать скорость движения, а также расстояние поездки;
- вывести потраченное горючее за определенный километраж;
- определить обороты мотора и т.д (автор видео — канал Arduino Tech PTZ).
Помимо устройства Arduino вам также потребуется жидкокристаллический модуль, адаптер Блютуз НС-05, а также сканер ELM327 и резисторное устройство на 10 кОм. Разумеется, необходимо приготовить и звуковой индикатор, монтажные провода и сам корпус устройства.
Процедура сборки осуществляется следующим образом:
- Сначала настраиваем Блютуз адаптер. К пинам устройства нужно припаять провода — к двум нижним и верхним контактам.
- Сам модуль подключается к плате для настройки, для этого необходимо открыть программу Arduino IDE 1.0.6 или любую другую версию, после его залить скетч в схему через USB-выход.
- Когда загрузка будет завершена, нужно зайти в меню Сервис — Монитор порта и выставить скорость 9600.
- Затем собирается схема с платой, адаптером и заранее подготовленным дисплеем. Сначала подключается Блютуз адаптер.
- После этого в схему добавляется дисплей. Более подробное описание подключения вы найдете на фото ниже.
- Резисторный элемент на 10 кОм используется для управления яркостью и контрастностью дисплея. Поэтому при первом подключении вы можете заметить, что изображения нет, если это так, то его нужно просто настроить путем поворота резистора.
- Далее, производится подключение дополнительной клавиши, которая будет выполнять функцию переключения экранов с информацией. Один контакт от кнопки идет к элементу GND, второй — к контакту 10. Чтобы подключить бипер, плюсовой контакт соединяется с 13 пином, а минусовой — с GND.
- Затем, используя то же программное обеспечение Arduino IDE 1.0.6, нужно залить скетч. Теперь вам остается только настроить бортовой компьютер и подключить его к автомобилю.
Фотогалерея «Схема подключения БК»
GPS-трекер
Чтобы собрать GPS-трекер на базе Arduino, вам потребуется:
- сама плата, процесс описан на примере модели Mega 2560;
- модуль GSM/GPRS, который будет использоваться для передачи данных на сервер;
- а также Arduino GPS-приемник, в примере мы рассмотрим модель SKM53 (автор видео об изготовлении трекера на примере платы SIM 808 — канал Alex Vas).
Как производится подключение схемы:
- Сначала осуществляется подключение модуля к основной плате, по умолчанию установлена скорость передачи данных 115200.
- После подключения нужно включить девайс и установить одинаковую скорость для всех портов — как последовательных, так и программных.
- GSM передатчик подключается к контактам 7 и 8 на основной микросхеме.
- Затем производится настройка модуля путем ввода команд. Все команды мы описывать не будем, их и так можно найти в Интернете без проблем. Рассмотрим только самые основные. AT+SAPBR=3,1,«CONTYPE»,«GPRS» — команда определяет тип подключения, в данном случае это GPRS. AT+SAPBR=3,1,«APN»,«internet.***.ru», где *** — это адрес оператора мобильной сети, который будет использоваться. AT+HTTPINIT — по этой команде производится инициализация HTTP.
- Нужно отметить один нюанс — при написании серверной составляющей интерфейса, желательно предусмотреть прием и выведение данных для нескольких адаптеров. Нужно установить переключатель на три позиции, это даст возможность получать данные от восьми автомобилей.
- Затем производится написание скетча на микросхеме. Сам скетч также можно найти в Сети, писать его необязательно. Учтите, если будут использоваться два активных последовательных порта, это может привести к ошибкам в передачи и отправке информации.
Парктроник
Чтобы соорудить парктроник, вам потребуются такие составляющие:
- сама микросхема;
- ультразвуковое устройство, в данном случае это дальномер HC-SR04:
- шесть светодиодных элементов;
- шесть резисторных элементов сопротивлением на 220 Ом;
- соединительные провода типа «папа-папа»;
- пьезодинамический элемент;
- макетная схема для сборки.
 Элементы для сборки парктроника на Arduino
Элементы для сборки парктроника на ArduinoПроцедура сборки выглядит следующим образом:
- Для начала на макетной схеме необходимо установить светодиодные элементы, подготовленные заранее. Отрицательный контакт у всех светодиодов будет общим. Короткий контакт — катод — следует подключить к отрицательной шине, которая имеется на макетной плате.
- К более длинным контактам диодов, то есть анодам, необходимо подключить резисторные элементы на 200 Ом, если вы не будете их использовать, это приведет к перегоранию диодов.
- На центральной части производится монтаж ультразвукового устройства. На этом контроллере есть четыре контакта. Vcc — это контакт питания на пять вольт, Echo — это выходной контакт, Trig — это вход, а GND — это заземление.
- После того, как дальномер будет установлен, к его выходам следует подключить проводку. В частности, контакт Echo подключается к выходу 13, Trig — к 12 контакту. GND, соответственно, необходимо соединить с заземлением, которое имеется на схеме контроллера, а оставшийся выход Vcc соединяется с 5-вольтовым питанием на плате Arduino.
- После выполнения этих действий нужно соединить проводку с контактами резисторных элементов. А также они подключаются последовательным образом к пинам на плате — используются пины от 2 до 7.
- Следующим этапом будет подключение пьезопищалки, которая и будет предупреждать водителя о приближении к препятствию. Минусовой выход, как вариант, можно будет объединить с отрицательным контактом установленного ранее дальномера. Что касается положительного контакта, то он соединяется с пином под номером 11 на микросхеме.
- Для того, чтобы устройство в конечном итоге работало в нормальном режиме, дополнительно нужно будет написать, после чего загрузить код программы в плату. В этом коде необходимо точно указать дистанцию, при приближении к которой начнут загораться диодные элементы и будет срабатывать пищалка. Причем тональность пищалки должна быть разной, чтобы водитель мог узнать, когда приближение к препятствию будет критическим. Сам код либо пишется самостоятельно, либо берется уже готовый вариант из Интернета. Вариантов скетчей очень много, вам нужно только выбрать наиболее подходящий для вашего устройства (автор видео — канал Arduino Prom).
Заключение
Как видите, микроплата Arduino — это универсальный вариант, с помощью которого можно создать множество различных девайсов. Помимо вышеописанных устройств, вы также можете соорудить спидометр, который будет выдавать информацию о скорости прямо на лобовое стекло, кнопку старт-стоп, и даже сигнализацию для транспортного средства. В целом вариантов очень много, если подойти к вопросу изготовления самодельного гаджета правильно, то у вас все получится.
Разумеется, для этого вы должны обладать знаниями в области электроники и электротехнике, при этом минимальных навыков, вероятнее всего, будет недостаточно. При изготовлении девайсов вам придется принимать собственные решения, о чем в Интернете может и не быть информации. Поэтому будьте готовы к тому, что процесс сборки может занять достаточно долгое время.
Видео «Как соорудить систему управления электродвигателем печки?»
Из видео ниже вы сможете узнать, как обустроить климат-контроль путем доработки регулятора отопительной системе на примере автомобиля ВАЗ 2115 (автор ролика — Иван Никульшин).
 Загрузка …
Загрузка …Вопрос чайника про подключение ардуино-проекта к системе питания автомобиля?
Сразу оговорюсь, что я не претендую на истину в последней инстанции, и всё написанное ниже, лишь моё субъективное мнение1) как быстро сядет аккумулятор автомобиля от работы такой системы, если в это время не заводить авто? а зимой?
на этот вопрос сложно ответить, не зная ёмкости аккумулятора, а также потребления Вашей поделки
2) если быстро, что делать? Возможно, лучше сделать так, чтобы зарядка включалась, только если машину завели? Т.е. провести провод не напрямую от аккумулятора, а через замок зажигания?
я обычно цеплялся от прикуривателя, но, когда у меня была «классика», то выключал устройство во время простоя авто, дабы не посадить аккумулятор «в ноль», а теперь же, купив чудо японского автомобилестроения, когда питание на прикуриватель подаётся только при включенном зажигании, такая потребность отпала.
Также, хотелось бы отметить, что напрямую питаться от аккумулятора не хорошо, о чём свидетельствует мой плачевный опыт неправильно подключённой сигнализации, когда при выходе из строя реле-регулятора, и получением в связи с этим полных 18 вольт в бортовой цепи от генератора, у меня сгорела сигнализация(был прямой зацеп от аккумулятора без предохранителя), которая попутно сожгла 2 лампочки повортников и все сервоприводы дверей(подав 18 вольт с генератора), 1 из сервоприводов же в свою очередь едва не спалил весь автомобиль, но к счастью дело обошлось лишь 1 катафотой на двери и теплоизоляцией, которая выгорела чуть более чем на половину.
3) где купить зарядное устройство, работающее от постоянного тока 12V? (подсоединение будет не через прикуриватель, а от отдельного провода)
Я опять же обычно покупаю зарядку для прикуривателя, а там уже к контактам припаиваю провода, и плучается дёшево и сердито(и опять же в такой констраукци есть предохранитель для работы от прикуривателя, который совсем не повредит)
Этот аккумулятор выдаёт 250 mAh.
На всякий случай, данная ёмкость говорит, что при использовании устройства, которое потребляет 250 mAh, аккумулятора хватит на час, а если, например, 25 mAh, то на 10 часов. Не ошибитесь в выборе аккумулятора, на мой скромный взгляд, стоит брать такой, чтобы заряда хватало минимум на 10 часов(на ночь)
Как сделать машинку на радиоуправлении Ардуино через bluetooth своими руками
Это первый роботизированный проект, который я когда-либо делал, и если вы никогда не пробовали собрать робота, то, скорее всего, думаете что это сложно. Но Ардуино и шасси 2WD / 4WD сделают вашу сборку намного проще, и вы соберете своего первого робота с радиоуправлением на Ардуино без каких-либо мучений.
По пути ко мне пришла идея о создании радиоуправляемой машины своими руками, которая бы объезжала препятствия, поэтому я собрал и этот проект, видео и файл программы к которому прикладываю ниже.
ФайлыШаг 1: Нужные части и инструмент
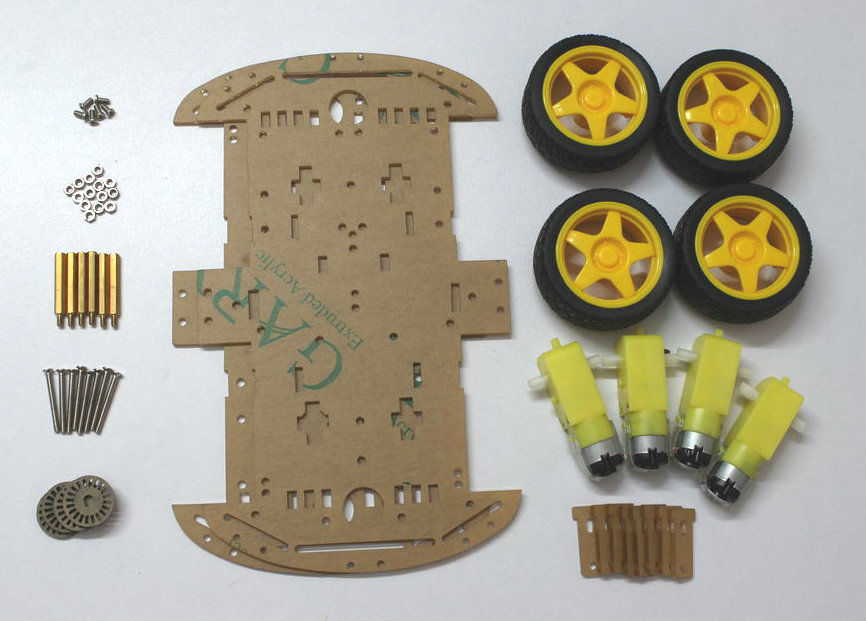
Я воспользовался готовыми решениями, и все запчасти и инструменты были приобретены через интернет.
Запчасти:
- Набор шасси 4WD для робота (GearBest)
- Arduino Nano (GearBest)
- Модуль H-моста LM298 (GearBest)
- Модуль bluetooth HC-06 (Amazon)
- Литий-ионные батарейки 2 x 18650 (GearBest)
- Отсек для батареек 2x 18650 (GearBest)
- Небольшая макетная плата (GearBest)
- Провода сечением 0.5 мм2
- Провода с джамперами папа-мама (Amazon)
- Провода с джамперами мама-мама (Amazon)
- Малярная лента, изолента или что-то подобное (Amazon)
Для робота, объезжающего препятствия:
Ультразвуковой модуль измерения расстояния HC — SR04 (GearBest)
Необходимый инструмент :
- Паяльник (Amazon)
- Кусачки (Amazon)
- Стриппер для провод (GearBest)
- Клеевой пистолет (GearBest)
Шаг 2: Что такое робот?
Робот – это электромеханическое устройство, которое способно каким-либо образом реагировать на окружающую обстановку и принимать самостоятельные решения или действия, чтобы достичь определенных целей.
Робот состоит из следующих компонентов:
- Структура / Шасси
- Привод / Мотор
- Контроллер
- Вводные устройства / Датчики
- Источник питания
В следующих шагах я опишу каждый из этих компонентов, и вы всё легко поймёте.
Шаг 3: Структура / Шасси
Структура состоит из физических компонентов. Робот имеет один или несколько физических компонентов, которые каким-либо образом двигаются для выполнения задания. В нашем случае структура робота – это шасси и колёса.
Шаг 4: Приводы
Под приводом можно понимать устройство, которое преобразовывает энергию (в робототехнике под энергией понимается электрическая энергия) в физическое движение. Большинство приводов производят вращательное или линейное движение.
В нашем случае привод – это DC-мотор, скорость которого равна 3000 оборотам в минуту, а вращающий момент 0.002 Н•м. Теперь добавим к нему шестерню с передаточным числом 1:48. Новая скорость уменьшается на коэффициент 48 (в результате давая 3000/44 = 68 оборотов в минуту) и вращающий момент увеличивается на коэффициент 48 (в результате давая 0.002 x 48 = 0.096 Н•м).
Шаг 5: Подготавливаем клеммы моторчиков
Отрежьте по 4 провода красного и черного цвета длиной примерно 12-15 см. Я использовал провода сечением 0.5 мм2. Оголите концы проводов. Припаяйте провода к клеммам моторчиков.
Вы можете проверить полярность моторчиков, соединив их с отсеком для батареек. Если он движется в прямом направлении (с красным проводом на позитивной и черным на негативной клеммах батареек), то с соединением все в порядке.
Шаг 6: Устанавливаем мотор
Прикрепите две акриловые распорки к каждому мотору при помощи двух длинных болтов и двух гаек. Для наглядности вы можете посмотреть видео.
Возьмите на заметку, что провода на каждом моторе ведут к центру шасси. Соедините оба красных и оба черных провода от моторов с каждой стороны шасси. После соединения у вас будет две клеммы на левой стороне и две на правой.
Шаг 7: Устанавливаем крышу
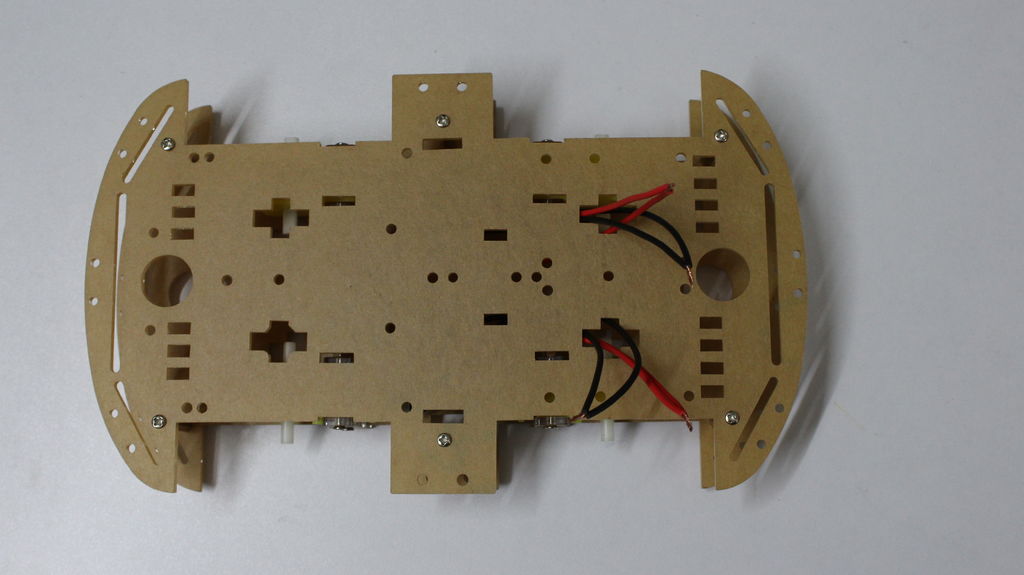
Послу установки 4 моторов нужно установить крышу. Приладьте 6 медных стоек при помощи гаек, клеммы проводов выведите сквозь отверстие в крыше.
Шаг 8: Контроллер
Теперь у нас установлены шасси и приводы, но нам не хватает контроллера. Шасси без контроллера никуда не поедут. Робот будет оставаться на месте, оставаясь безжизненным. Поэтому, для того чтобы робот перемещался, нам нужен мозг (контроллер).
Контроллер – программируемое устройство, способное работать по заданной программе и отвечающее за все вычисления, принятие решений и коммуникацию. В нашем случае в качестве контроллера мы используем микроконтроллер Ардуино Нано.
Контроллер принимает входные данные (с датчиков, удалённо и т.д.), обрабатывает их и затем даёт команду приводам (моторам) выполнить выбранное задание.
Если вы подключите позитивный провод от батарей на одну строну моторчика, затем подключите негативный провод от батарей на другой контакт моторчика, то он начнёт крутиться вперёд. Если вы поменяете провода местами, то мотор начнёт вращаться в другую сторону.
Микроконтроллер можно использовать, чтобы вращать мотор в одном направлении, но если вам хочется с помощью микроконтроллера вращать мотор и вперёд, и назад, то вам нужна дополнительная схема – H-мост. В следующем шаге я объясню, что это такое.
Шаг 9: Н-мост (модуль LM 298)
Что такое Н-мост?
Термин Н-мост произошел от типичного графического представления этой схемы. Это схема, которая может вращать мотор как в прямом, так и в обратном направлении.
Принцип работы:
Посмотрите приложенную картинку для понимания принципа работы схемы Н-моста. Мост состоит из 4 электронных выключателей S1, S2, S3, S4 (транзисторы / MOSFET/ IGBTS).
Когда выключатели S1 и S4 закрыты, а остальные два открыты, положительное напряжение будет проходить через мотор, и он будет вращаться в прямом направлении. Таким же образом, когда закрыты выключатели S2 и S3, а S1 и S4 открыты, обратное напряжение будет даваться на мотор и он начнёт вращаться в обратном направлении.
Заметка: выключатели на одной руке (то есть S1, S2 или S3, S4) никогда не закрываются одновременно – это создаст короткое замыкание.
Н-мосты доступны в виде интегральных схем, либо можно собрать свой мост при помощи 4 транзисторов или MOSFET. В моём случае используется интегральная схема Н-моста LM298, которая позволяет управлять скоростью и направлением моторов.
Описание распиновки:
Out 1: DC мотор 1 «+» или шаговый двигатель A+
Out 2: DC мотор 1 «-» или шаговый двигатель A-
Out 3: DC мотор 2 «+» или шаговый двигатель B+
Out 4: вывод мотора B
12v: вход 12V, но можно использовать от 7 до 35V
GND: Земля
5v: выход 5V, если джампер 12V стоит на месте, идеально для питания Arduino (и т.п.)
EnA: позволяет получать сигналы PWM для мотора A (Пожалуйста, прочитайте секцию «Arduino Sketch Considerations»)
IN1: включает мотор A
IN2: включает мотор A
IN3: включает мотор B
IN4: включает мотор B
BEnB: позволяет получать сигналы PWM для мотора B (Пожалуйста, прочитайте секцию «Arduino Sketch Considerations»)
Шаг 10: Входы / Датчики

В отличие от людей, роботы не ограничены лишь зрением, звуком, осязанием, обонянием и вкусом. Роботы используют различные датчики для взаимодействия с внешним миром.
Датчик – это устройство, которое выявляет и отвечает на определенные типы входящей информации из окружающего мира. Этой информацией может быть свет, тепло, движение, влажность, давление или любое другое явление окружающей среды.
Входящие сигналы могут идти от датчиков, удалённо, или со смартфона. В этом руководстве я использую смартфон в качестве девайса, отправляющего сигналы, управляющие роботом.
Шаг 11: Источник питания
Чтобы управлять приводами (моторами) и питать контроллер, роботу нужен источник питания. Большинство роботов питается от батарей. Когда мы говорим о батареях, то имеем в виду множество вариантов:
- Алкалиновые батарейки AA (не заряжаются)
- Никель-металгидридные или никель-кадмиевые батарейки AA (заряжаются)
- Литий-ионные батареи
- Литий-полимерные батареи
В зависимости от ваших нужд, нужно выбрать подходящий вид батарей. По-моему мнению, нужно всегда выбирать заряжаемые батареи достаточной ёмкости. Я использовал 2 литий-ионные батареи стандарта 18650 ёмкостью 2600mAh. Если для автономности вам нужно больше мощности, используйте большой комплект батарей, например 5A turnigy.
Отсек для батарей:
Отсек для батарей я заказал в Китае, он не подходил для батарей с плоским верхом, поэтому я использовал два неодимовых магнита для придания батарейкам нужной формы.
Зарядка:
Для зарядки батарей нужен хороший зарядник. По моему опыту, эти зарядники хорошо зарекомендовали себя:
- PowerEx AA Charger-Analyzer (Amazon)
- XTAR LiIon Battery Charger (Amazon)
- Turnigy LiPo Battery Charger (Amazon)
Шаг 12: Установка компонентов
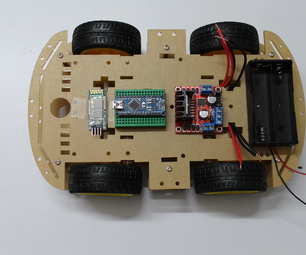
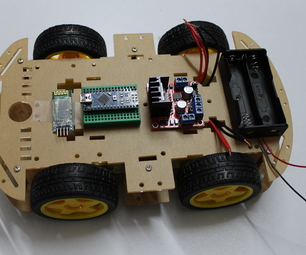
Цельная схема устанавливается на крыше. Отсек для батарей, драйвер двигателей LM 298 и маленькую макетную плату я закрепил горячим клеем, но можно просто прикрутить их. Модуль bluetooth закрепляется скотчем. Ардуино нано вставьте в макетную плату.
Шаг 13: Электропроводка
Для соединения модулей понадобятся провода с джамперами.
Соедините красные провода двух моторов вместе (на каждой стороне) и затем черные провода. В итоге у вас выйдет по две клеммы с каждой стороны.
MOTORA отвечает за два правых мотора, соответственно два левых мотора соединены с MOTORB.
Для соединения всех компонентов следуйте инструкции:
Соединение моторов:
Out1 -> красный провод левостороннего мотора (+ )
Out2 -> черный провод левостороннего мотора ( — )
Out3 -> красный провод правостороннего мотора ( + )
Out4 -> черный провод правостороннего мотора ( — )
LM298 — > Arduino
IN1 -> D5
IN2-> D6
IN2 ->D9
IN2-> D10
Модуль Bluetooth -> Arduino
Rx-> Tx
Tx ->Rx
GND -> GND
Vcc -> 3.3V
Питание
12V — > красный провод батарей
GND -> черный провод батарей и пин GND на Arduino
5V -> соедините с пином 5V Arduino
Шаг 14: Логика управления
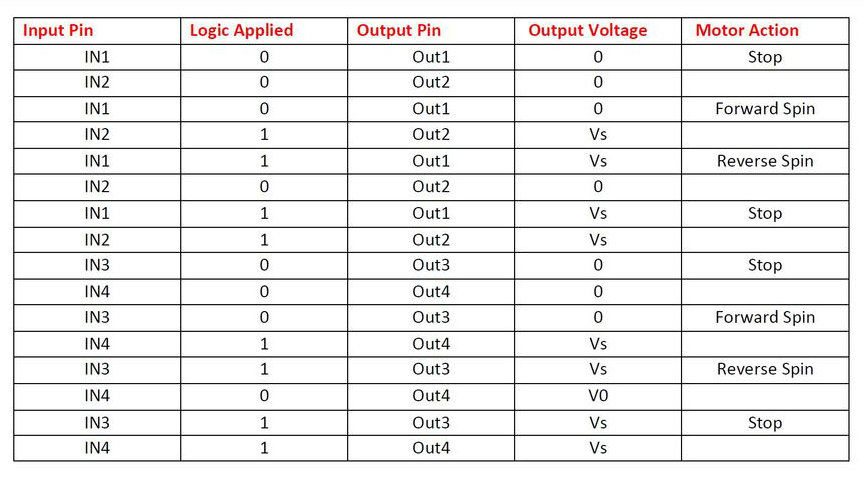
Чтобы понять принцип работы, я создал эту логическую таблицу. Она очень пригождается во время написания кода.
Шаг 15: Софт

Часть с фотом очень проста, она не требует никаких библиотек. Если вы поняли таблицу логики из прошлого шага, то сможете написать свой код. Я не тратил на код много времени и просто скопировал чей-то готовый вариант. Чтобы управлять роботом-машиной, я использую смартфон, соединённый с контроллером через модуль Bluetooth (HC-06).
Скачайте приложение. После его установки, свяжите телефон с модулем Bluetooth. Пароль «1234». Код Ардуино прикреплён ниже.
ФайлыШаг 16: Тестирование
Чтобы проверить робота-машину, я положил её на маленькую картонную коробку. Таким образом, колёса будут крутиться, но машинка будет оставаться на месте. Проверьте работоспособность, нажимая все доступные кнопки. Если всё работает, то можно по-настоящему управлять ей.
Заметка: если моторы вращаются в противоположном направлении, то просто поменяйте местами провода.
Шаг 17: Планы на будущее
В этом руководстве я объяснил, как создать простенькую машинку. Дальше я хочу добавить в неё некоторые улучшения. Вы можете присоединить к ней различные датчики, вот некоторые идеи:
- Добавление ультразвукового датчика для объезда препятствий
- Использование модуля WiFi, например ESP8266 или Node MCU вместо Bluetooth, для удлинения дистанции управления.
- Добавление солнечной панели для зарядки батарей.